一种隧道锚杆台车注浆系统及控制方法与流程
1.本发明涉及隧道注浆控制技术领域,尤其涉及一种隧道锚杆台车注浆系统及控制方法。
背景技术:
2.锚杆加固是一种快速、有效的加固岩石的方法,可用于洞室顶拱和边壁,以及边坡的加固,防止在岩石中原本就存在的或由于爆破而产生的裂缝等造成硐室顶拱和边壁表面的岩石松动。另外,岩石中应力环境的改变,也会造成岩块松动,甚至发生塌方。用锚杆就可以把松动的岩块稳固在坚实的岩体上。靠锚杆和岩石的相互作用使岩体有一个静态的稳定的整饰性能,是隧道钻爆法施工的主要支护手段,使用锚杆台车能够对隧道断面进行有效的锚杆支护,提高围岩的强度与稳定性,锚杆台车是在井下巷道顶板或侧帮中钻凿锚杆孔并完成部分或全部安装锚杆工序的自移式设备。随着矿山井巷、隧道等地下工程锚杆支护作业的普及与发展。其中,锚杆注浆作为锚杆支护作业过程中的关键工序,直接影响锚杆施工的优劣;
3.经检索,中国专利号cn113700505a公开了一种隧道锚杆台车注浆系统及控制方法,该发明虽然可根据注浆过程中采集的注浆参数信息实现注浆系统自动化操作,还能根据注浆效果控制放料装置和注水装置以调节水灰比。增强了隧道锚杆台车的注浆效果,但是无法精确地控制浆液流量,需工作人员人工观察,提高工作人员工作量,降低工作积极性;此外,现有的隧道锚杆台车注浆系统及控制方法控制平台连接设备过多时会导致控制平台响应速度变慢,降低工作人员使用体验,为此,我们提出一种隧道锚杆台车注浆系统及控制方法。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺陷,而提出的一种隧道锚杆台车注浆系统及控制方法。
5.为了实现上述目的,本发明采用了如下技术方案:
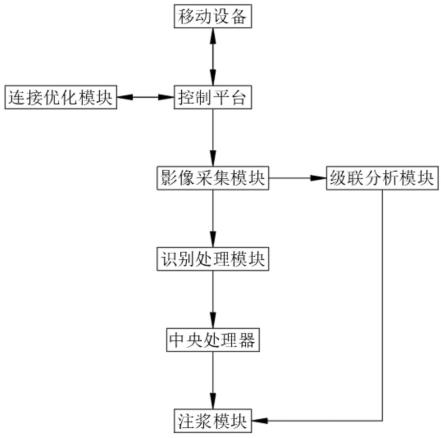
6.一种隧道锚杆台车注浆系统,包括移动设备、控制平台、影像采集模块、识别处理模块、中央处理器、注浆模块、级联分析模块以及连接优化模块;
7.其中,所述移动设备用于工作人员登陆控制平台以及查看各子模块运行信息;
8.所述控制平台用于工作人员下发控制指令;
9.所述影像采集模块用于采集钻孔以及注浆影像信息;
10.所述识别处理模块用于对采集到的影像信息进行优化识别;
11.所述中央处理器用于接收识别结果,并生成相对应的控制执行指令;
12.所述注浆模块用于将浆液注入锚杆中;
13.所述级联调控模块用于依据识别结果对锚杆中浆液位置进行分析控制;
14.所述连接优化模块用于采集控制平台连接运行情况并进行性能优化。
15.作为本发明的进一步方案,所述移动设备具体包括笔记本电能、平板电脑以及智能手机。
16.作为本发明的进一步方案,所述识别处理模块优化识别具体步骤如下:
17.步骤一:识别处理模块对采集的影像信息进行逐帧分解以获取多组检测图片,之后按照各组检测图片的显示比例确定各组检测图片的分块数量并对各组检测图片进行分块处理;
18.步骤二:将处理完成的各组检测图片通过傅里叶正反变换进行图像空间转换至频率空间的相互变换,并对转换至频率空间的图像信息中的高频成分进行分析提取,并对其进行滤波处理,对处理完成的图像信息中的每一个像素逐点进行阈值计算;
19.步骤三:之后收集各像素点r、g以及b三组分量数据,再依据采集到的三组分量对x、y以及z三组刺激值进行计算以构建l
*a*b*
模型,之后收集该检测图片l
*
、a
*
以及b
*
的平均值作为该舌苔影像的特征向量,并依据各组特征向量值寻找锚杆区域。
20.作为本发明的进一步方案,步骤三中所述l
*a*b*
模型具体构建公式如下:
21.x=0.4902r+0.3099g+0.1999b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
22.y=0.1770r+0.8123g+0.0.0107b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
23.z=0.0101g+0.9809b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0024][0025][0026][0027][0028]
其中,l代表亮度,a表示从红色至绿色的范围值,b表示从蓝色至黄色的范围值。
[0029]
作为本发明的进一步方案,所述级联调控模块分析控制具体步骤如下:
[0030]
步骤ⅰ:构建并训练一组目标检测网络,之后通过目标检测网络接收采集到的注浆影像信息后,对固定帧率的视频或图像序列帧进行处理,并对实际视频帧的间隔时间进行计算;
[0031]
步骤ⅱ:记录计算出的实际视频帧的间隔时间,并通过卡尔曼滤波理论建立运动模型,同时通过构建的运动模型实时获取浆液液面的运动状态;
[0032]
步骤ⅲ:运动模型依据对浆液液面的线性运动假设,对其在视频帧中的位置信息进行确认,收集浆液液面在当前视频帧中的位置信息,并构建预测方程对浆液液面各在下一视频帧中的运动状态进行估计,同时依据当前浆液液面位置对浆液流量进行控制。
[0033]
作为本发明的进一步方案,步骤ⅰ中所述间隔时间具体计算公式如下:
[0034]
[0035][0036]
式中,δt
k+1
代表两组视频帧之间的间隔时间,代表下采样得到的视频帧与原始视频流中的之间的延迟时间,代表跟踪算法处理视频帧的消耗时间。
[0037]
一种隧道锚杆台车注浆控制方法,该控制方法具体如下:
[0038]
(1)工作人员通过控制平台下发注浆指令;
[0039]
(2)采集钻孔影像信息并对其进行图像优化;
[0040]
(3)注浆并实时采集锚杆中浆液液面位置信息;
[0041]
(4)依据浆液液面位置进行分析调控;
[0042]
(5)实时检测控制平台运行情况并对其进性能优化。
[0043]
作为本发明的进一步方案,步骤(5)中所述性能优化具体步骤如下:
[0044]
步骤
①
:连接优化模块为控制平台各连接端口生成一个启动链表,并按照端口的lru顺序对各组启动链表头部进行进一步链接,收集交互频率最少的端口信息,并将该端口的启动链表安排在lru链表的首位,并依次进行排序;
[0045]
步骤
②
:在端口启动之前清除所有更新页表项的访问位,连接优化模块在端口启动时间结束之前,重新检查所有页面的访问位,检查完成后对启动链表中的各组页面信息进行数据更新,再从lru链表的头部依次选择最不活跃的端口,并从相应启动链表中选择受害页面,直到获得足够的页面;
[0046]
步骤
③
:将选择的受害页面合并为一个块,并对该块进行标记,再唤醒一个压缩驱动程序以解析被标记的块,并获得属于该块的物理页,之后将物理页复制到缓冲区中,然后调用压缩算法将缓冲区中的该物理页压缩到压缩块中,并将压缩块存储至连接优化模块中。
[0047]
相比于现有技术,本发明的有益效果在于:
[0048]
1、本发明通过级联调控模块构建并训练一组目标检测网络,之后通过目标检测网络接收采集到的注浆影像信息后,对固定帧率的视频或图像序列帧进行处理,并对实际视频帧的间隔时间进行计算,再记录计算出的实际视频帧的间隔时间,并通过卡尔曼滤波理论建立运动模型,同时通过构建的运动模型实时获取浆液液面的运动状态,之后运动模型依据对浆液液面的线性运动假设,对其在视频帧中的位置信息进行确认,收集浆液液面在当前视频帧中的位置信息,并构建预测方程对浆液液面各在下一视频帧中的运动状态进行估计,同时依据当前浆液液面位置对浆液流量进行控制,通过构建目标检测网络能够有效的提高浆液流量控制精度,保证了浆液灌注的稳定性,无需工作人员人工观察,使操作过程简单、便捷,减少工作人员工作量,提高工作积极性;
[0049]
2、本发明相较于以往注浆控制方法,该控制方法通过连接优化模块为控制平台各连接端口生成一个启动链表,并按照交互频率由少到多依次排序,之后在端口启动之前清除所有更新页表项的访问位,连接优化模块在端口启动时间结束之前,重新检查所有页面的访问位,检查完成后对启动链表中的各组页面信息进行数据更新,再从lru链表的头部依次选择最不活跃的端口,并从相应启动链表中选择足够的受害页面,将选择的受害页面合并为一个块并进行标记,再解析被标记的块以获得相应物理页,之后将物理页复制到缓冲区中,然后调用压缩算法将缓冲区中的该物理页压缩到压缩块中,并将压缩块存储至连接
优化模块中,能够对内存进行大粒度压缩,提高压缩效率,有效的提高了控制平台连接速度,同时节省系统压缩内存所需的时间,提高工作人员使用体验。
附图说明
[0050]
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。
[0051]
图1为本发明提出的一种隧道锚杆台车注浆系统的系统框图;
[0052]
图2为本发明提出的一种隧道锚杆台车注浆控制方法的流程框图。
具体实施方式
[0053]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
[0054]
实施例1
[0055]
参照图1,一种隧道锚杆台车注浆系统,包括移动设备、控制平台、影像采集模块、识别处理模块、中央处理器、注浆模块、级联分析模块以及连接优化模块;
[0056]
移动设备用于工作人员登陆控制平台以及查看各子模块运行信息。
[0057]
本实施例中,移动设备具体包括笔记本电能、平板电脑以及智能手机。
[0058]
控制平台用于工作人员下发控制指令;影像采集模块用于采集钻孔以及注浆影像信息;识别处理模块用于对采集到的影像信息进行优化识别。
[0059]
具体的,识别处理模块对采集的影像信息进行逐帧分解以获取多组检测图片,之后按照各组检测图片的显示比例确定各组检测图片的分块数量并对各组检测图片进行分块处理,将处理完成的各组检测图片通过傅里叶正反变换进行图像空间转换至频率空间的相互变换,并对转换至频率空间的图像信息中的高频成分进行分析提取,并对其进行滤波处理,对处理完成的图像信息中的每一个像素逐点进行阈值计算,之后收集各像素点r、g以及b三组分量数据,再依据采集到的三组分量对x、y以及z三组刺激值进行计算以构建l
*a*b*
模型,之后收集该检测图片l
*
、a
*
以及b
*
的平均值作为该舌苔影像的特征向量,并依据各组特征向量值寻找锚杆区域。
[0060]
需要进一步说明的是,l
*a*b*
模型具体构建公式如下:
[0061]
x=0.4902r+0.3099g+0.1999b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
[0062]
y=0.1770r+0.8123g+0.0.0107b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0063]
z=0.0101g+0.9809b
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0064][0065][0066]
[0067][0068]
其中,l代表亮度,a表示从红色至绿色的范围值,b表示从蓝色至黄色的范围值。
[0069]
中央处理器用于接收识别结果,并生成相对应的控制执行指令;注浆模块用于将浆液注入锚杆中;级联调控模块用于依据识别结果对锚杆中浆液位置进行分析控制。
[0070]
具体的,级联调控模块构建并训练一组目标检测网络,之后通过目标检测网络接收采集到的注浆影像信息后,对固定帧率的视频或图像序列帧进行处理,并对实际视频帧的间隔时间进行计算,再记录计算出的实际视频帧的间隔时间,并通过卡尔曼滤波理论建立运动模型,同时通过构建的运动模型实时获取浆液液面的运动状态,之后运动模型依据对浆液液面的线性运动假设,对其在视频帧中的位置信息进行确认,收集浆液液面在当前视频帧中的位置信息,并构建预测方程对浆液液面各在下一视频帧中的运动状态进行估计,同时依据当前浆液液面位置对浆液流量进行控制。
[0071]
本实施例中,间隔时间具体计算公式如下:
[0072][0073][0074]
式中,δt
k+1
代表两组视频帧之间的间隔时间,代表下采样得到的视频帧与原始视频流中的之间的延迟时间,代表跟踪算法处理视频帧的消耗时间。
[0075]
连接优化模块用于采集控制平台连接运行情况并进行性能优化。
[0076]
实施例2
[0077]
参照图2,一种隧道锚杆台车注浆控制方法,该控制方法具体如下:
[0078]
工作人员通过控制平台下发注浆指令。
[0079]
采集钻孔影像信息并对其进行图像优化。
[0080]
注浆并实时采集锚杆中浆液液面位置信息。
[0081]
依据浆液液面位置进行分析调控。
[0082]
实时检测控制平台运行情况并对其进性能优化。
[0083]
具体的,连接优化模块为控制平台各连接端口生成一个启动链表,并按照端口的lru顺序对各组启动链表头部进行进一步链接,收集交互频率最少的端口信息,并将该端口的启动链表安排在lru链表的首位,并依次进行排序,之后在端口启动之前清除所有更新页表项的访问位,连接优化模块在端口启动时间结束之前,重新检查所有页面的访问位,检查完成后对启动链表中的各组页面信息进行数据更新,再从lru链表的头部依次选择最不活跃的端口,并从相应启动链表中选择受害页面,直到获得足够的页面,将选择的受害页面合并为一个块,并对该块进行标记,再唤醒一个压缩驱动程序以解析被标记的块,并获得属于该块的物理页,之后将物理页复制到缓冲区中,然后调用压缩算法将缓冲区中的该物理页压缩到压缩块中,并将压缩块存储至连接优化模块中。
[0084]
以上结合附图对本发明的实施方式作了详细说明,但本发明不限于所描述的实施方式。对于本领域的技术人员而言,在不脱离本发明原理和精神的情况下,对这些实施方式
进行多种变化、修改、替换和变型,仍落入本发明的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1