车辆跟驰换道行为决策方法、装置及电子设备与流程
本发明涉及计算机,尤其涉及一种车辆跟驰换道行为决策方法、装置及电子设备。
背景技术:
1、交通流模拟是指建模车辆驾驶行为的一种技术,在开发更安全、更有效的交通系统中起着重要的作用,在交通流量分析、控制、优化等方面有多种应用。例如,城市管理者想要缓解城市交通拥堵,可以利用设计良好的交通模拟器来分析和理解拥堵的原因,并制定有针对性的政策并进一步预测策略如何与模拟器一起工作,并对其进行迭代优化。此外,交通流模拟器也是强化学习算法的试验台,其模拟的真实性是保证下游应用性能的关键。
2、车辆驾驶行为包括跟驰行为和换道行为,其中,跟驰行为是指行驶在当前车道的车辆根据前方位于同一车道车辆的行驶状态来调整行驶速度的纵向驾驶行为;换道行为是指行驶在车辆为了保证行驶安全或者追求更好的驾驶体验从当前车道转向另一个车道的横向驾驶行为。基于这两种驾驶行为,目前的车流模拟方法主要分为两类:动力学模型和数据驱动模型。
3、动力学模型一般是将行驶的车辆视为一种自动化的粒子,基于人类关于驾驶行为的认知设定一些先验假设,并根据这些假设利用高度简化的物理方程模拟驾驶者的决策。数据驱动模型则是使用机器学习或其它一些数据挖掘方法,通过从大量车辆行驶轨迹数据中提取特征来训练模型,进而由训练好的模型决策车辆下一步的驾驶行为。
4、然而,目前的车流模拟方法忽略了车辆行驶过程中与周围车辆的交互行为,而且大多只是对两种驾驶行为进行独立建模后再组合在一起,忽略了跟驰行为和换道行为之间的相关性,导致车辆跟驰换道时决策的预测精度低。
技术实现思路
1、本发明提供一种车辆跟驰换道行为决策方法、装置及电子设备,用以解决现有技术中车辆跟驰换道时决策的预测精度低的缺陷,实现准确预测车辆跟驰换道时的决策行为,提升了车辆跟驰换道时决策的准确率。
2、本发明提供一种车辆跟驰换道行为决策方法,包括:
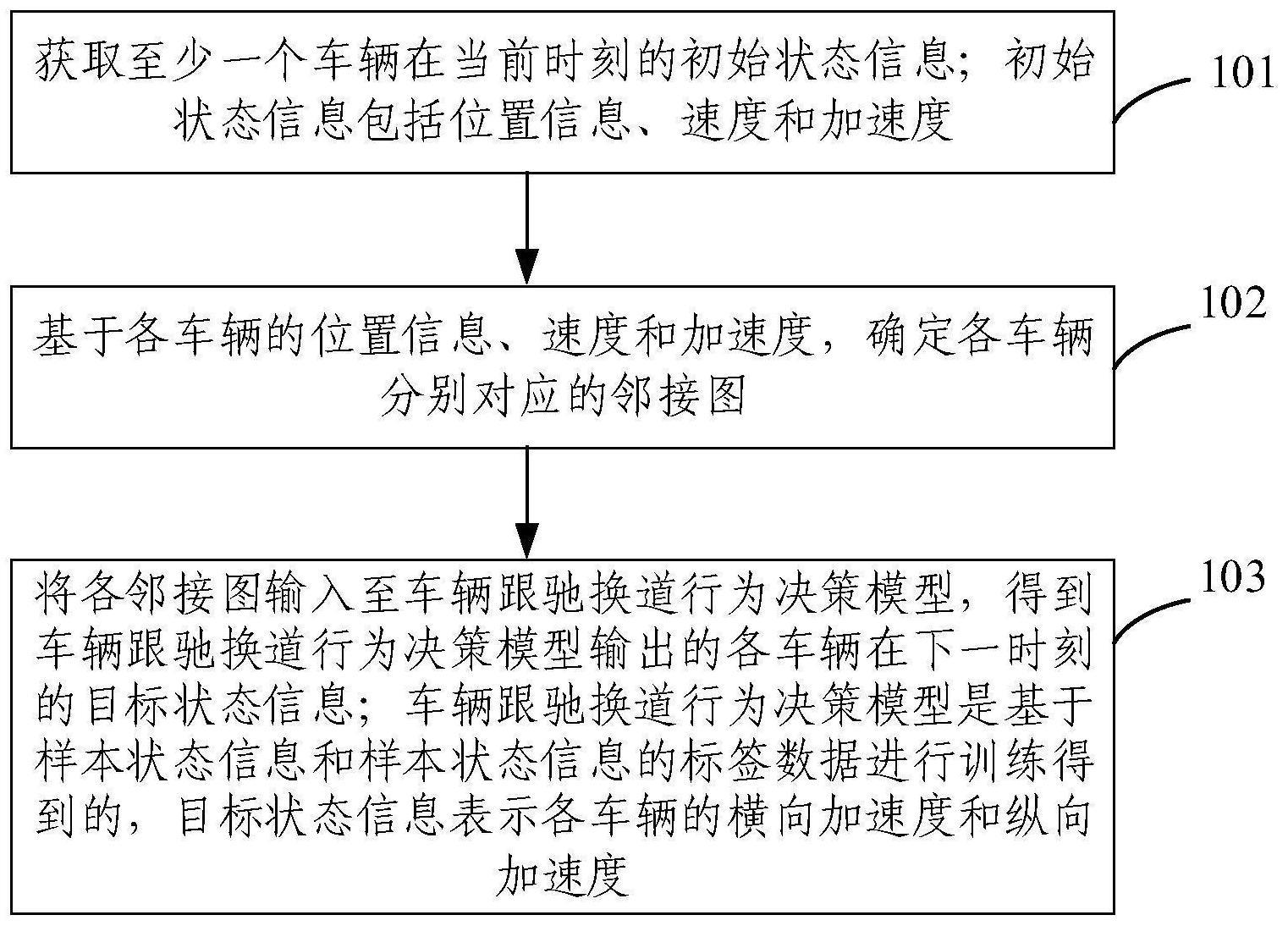
3、获取至少一个车辆在当前时刻的初始状态信息;所述初始状态信息包括位置信息、速度和加速度;
4、基于各所述车辆的所述位置信息、所述速度和所述加速度,确定各所述车辆分别对应的邻接图;
5、将各所述邻接图输入至车辆跟驰换道行为决策模型,得到所述车辆跟驰换道行为决策模型输出的各所述车辆在下一时刻的目标状态信息;所述车辆跟驰换道行为决策模型是基于样本状态信息和样本状态信息的标签数据进行训练得到的,所述目标状态信息表示各所述车辆的横向加速度和纵向加速度。
6、根据本发明提供的一种车辆跟驰换道行为决策方法,所述车辆跟驰换道行为决策模型包括决策模块和执行模块;所述将各所述邻接图输入至车辆跟驰换道行为决策模型,得到所述车辆跟驰换道行为决策模型输出的各所述车辆在下一时刻的目标状态信息,包括:
7、将各所述邻接图输入至所述决策模块,得到所述决策模块输出的各所述车辆的决策结果;所述决策结果表示多个车道在下一时刻作为目标车道的概率;
8、将所述决策结果输入至所述执行模块,得到所述执行模块输出的各所述车辆的在下一时刻的目标状态信息。
9、根据本发明提供的一种车辆跟驰换道行为决策方法,所述决策模块包括效用函数单元、安全函数单元和综合决策单元;
10、所述将各所述邻接图输入至所述决策模块,得到所述决策模块输出的各所述车辆的决策结果,包括:
11、将各所述邻接图输入至所述效用函数单元,得到所述效用函数单元输出的各所述车辆分别在各所述车道行驶时的满意度;
12、将各所述邻接图输入至所述安全函数单元,得到所述安全函数单元输出的各所述车辆分别在各所述车道行驶时的安全评估值;
13、将所述满意度和所述安全评估值输入至所述综合决策单元,得到所述综合决策单元输出的各所述车辆的决策结果。
14、根据本发明提供的一种车辆跟驰换道行为决策方法,所述将所述决策结果输入至所述执行模块,得到所述执行模块输出的各所述车辆在下一时刻的目标状态信息,包括:
15、对所述决策结果进行解析,得到各所述车辆分别在各所述车道行驶时的概率;
16、选择概率最大的车道作为目标车道;
17、基于所述目标车道,确定各所述车辆在下一时刻的目标状态信息。
18、根据本发明提供的一种车辆跟驰换道行为决策方法,所述将各所述邻接图输入至所述效用函数单元,得到所述效用函数单元输出的各所述车辆分别在各所述车道行驶时的满意度,包括:
19、基于各所述邻接图,确定各所述车辆在各所述车道行驶时的加速度预测值;
20、基于所述加速度预测值,确定各所述车辆在各所述车道的效用评估值;
21、对所述效用评估值进行归一化,得到各所述车辆分别在各所述车道行驶时的满意度。
22、根据本发明提供的一种车辆跟驰换道行为决策方法,所述将各所述邻接图输入至所述安全函数单元,得到所述安全函数单元输出的各所述车辆分别在各所述车道行驶时的安全评估值,包括:
23、基于各所述邻接图,分别计算各所述车辆的自身注意力分数以及各所述车辆与至少一个相邻车辆之间的相邻注意力分数;
24、基于所述自身注意力分数和所述相邻注意力分数,确定各所述车辆分别对应的聚合特征;
25、基于所述聚合特征,确定各所述车辆分别在各所述车道行驶时的安全评估值。
26、根据本发明提供的一种车辆跟驰换道行为决策方法,所述将所述满意度和所述安全评估值输入至所述综合决策单元,得到所述综合决策单元输出的各所述车辆的决策结果,包括:
27、将所述满意度和所述安全评估值相乘,得到各所述车辆的决策结果。
28、根据本发明提供的一种车辆跟驰换道行为决策方法,所述基于所述目标车道,确定各所述车辆在下一时刻的目标状态信息,包括:
29、基于所述目标车道,采用加速度预测模型得到各所述车辆在下一时刻的纵向加速度;
30、在所述目标车道发送改变的情况下,确定各所述车辆在下一时刻的横向加速度。
31、本发明还提供一种车辆跟驰换道行为决策装置,包括:
32、获取模块,用于获取至少一个车辆在当前时刻的初始状态信息;所述初始状态信息包括位置信息、速度和加速度;
33、确定模块,用于基于各所述车辆的所述位置信息、所述速度和所述加速度,确定各所述车辆分别对应的邻接图;
34、行为决策模块,用于将各所述邻接图输入至车辆跟驰换道行为决策模型,得到所述车辆跟驰换道行为决策模型输出的各所述车辆在下一时刻的目标状态信息;所述车辆跟驰换道行为决策模型是基于样本状态信息和样本状态信息的标签数据进行训练得到的,所述目标状态信息表示各所述车辆的横向加速度和纵向加速度。
35、本发明还提供一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述车辆跟驰换道行为决策方法方法。
36、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述车辆跟驰换道行为决策方法方法。
37、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述车辆跟驰换道行为决策方法方法。
38、本发明提供的车辆跟驰换道行为决策方法、装置及电子设备,通过获取至少一个车辆在当前时刻的初始状态信息;初始状态信息包括位置信息、速度和加速度;再根据每个车辆的位置信息、速度和加速度,确定每个车辆分别对应的邻接图;将各邻接图输入至车辆跟驰换道行为决策模型,得到车辆跟驰换道行为决策模型输出的各车辆在下一时刻的目标状态信息;车辆跟驰换道行为决策模型是基于样本状态信息和样本状态信息的标签数据进行训练得到的,目标状态信息表示各车辆的横向加速度和纵向加速度,实现了对下一时刻各车辆的目标状态信息的预测,从而实现准确预测车辆跟驰换道时的决策行为,提升了车辆跟驰换道时决策的准确率。
- 还没有人留言评论。精彩留言会获得点赞!