一种汽车避障系统及其方法
本发明涉及汽车避障相关,具体为一种汽车避障系统及其方法。
背景技术:
1、智能驾驶汽车由于其自主智能、安全高效的特点,越来越受到人们的青睐,智能驾驶逐渐发展成为一种新的技术领域。无论何时何地,安全永远是汽车最重要的一项因素,安全避障也已成为智能驾驶汽车上一项必不可少的功能系统。安全避障功能是在车辆在当前车道上行驶时,车辆利用自身的感知设备获取行驶环境的实时信息并反馈给系统,系统根据综合信息分析判断障碍物的信息,通过算法计算得到车辆可以合理地避开这些安全隐患应采取的策略,包括制动、转向等措施,从而保证车辆安全、高效和稳定地行驶。在实际情况中,道路交通状况比较复杂,车辆所遇到的障碍物既有动态的也有静态的,而且有时候动态障碍物的运动都是随机变化的,这也是避障问题复杂多样的原因之一。
2、在对比文件“cn106515713a”的说明书中提及“包括扫描装置、车速传感器、控制系统和输出装置,所述控制系统的检测输入端与所述扫描装置和车速传感器的输出端连接,所述控制系统的输出端与所述输出装置连接;所述扫描装置包括机架、摆动座、驱动装置、传感器和用于检测摆动座摆动角度的编码器”,但是,对比文件中的汽车避障系统并不可在避障后进行及时快速稳定速度,难以及时制动和恒速运行,此在行驶过程中存在一定的安全隐患。
技术实现思路
1、本发明的目的在于提供一种汽车避障系统及其方法,以解决上述背景技术中提出的对比文件中的汽车避障系统并不可在避障后进行及时快速稳定速度,难以及时制动和恒速运行,此在行驶过程中存在一定的安全隐患的问题。
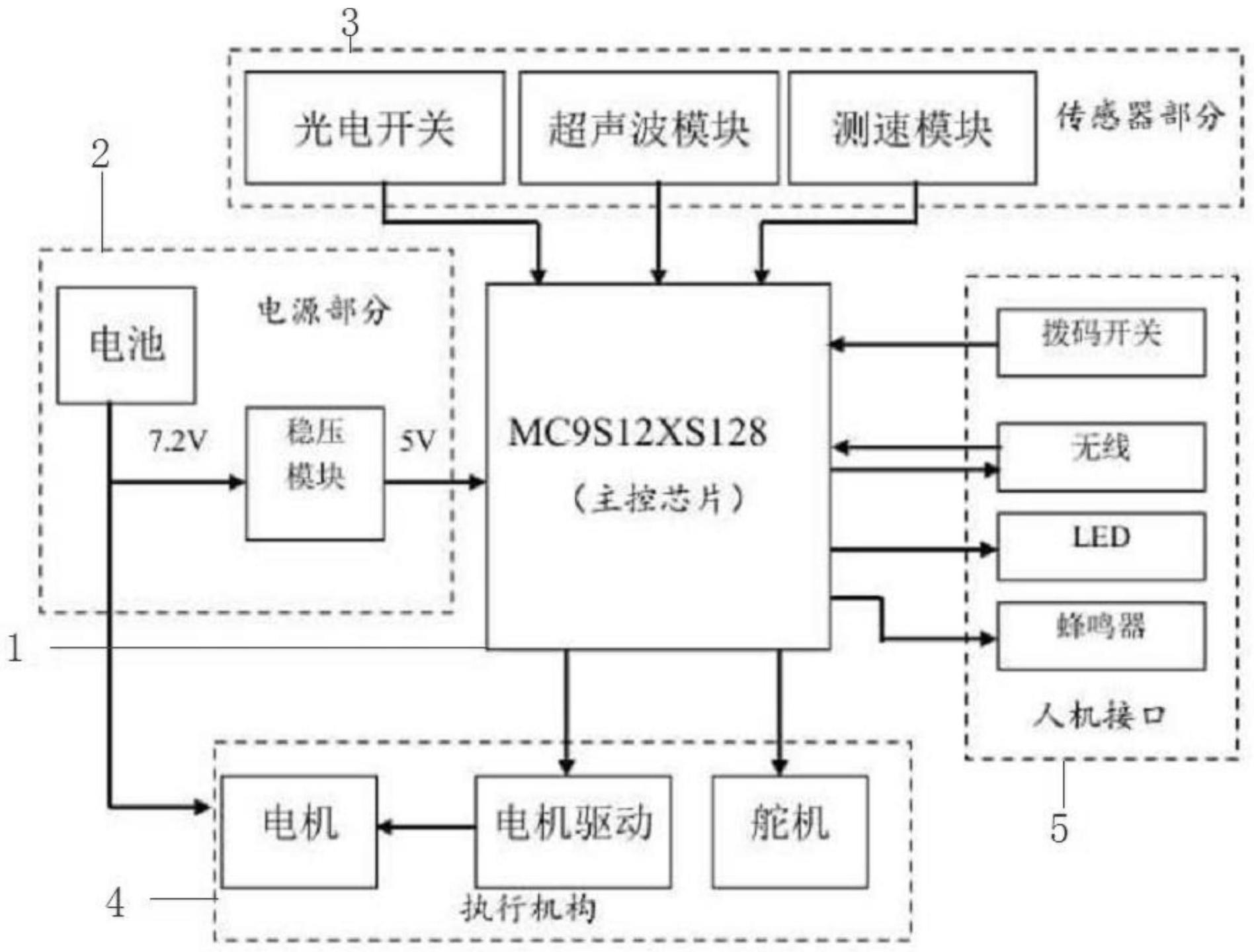
2、为实现上述目的,本发明提供如下技术方案:一种汽车避障系统,包括主控芯片、电源部分、传感器部分、执行机构和人机接口,所述主控芯片分别与电源部分、传感器部分、执行机构和人机接口之间电性连接,且电源部分与执行机构之间电性连接在一起,所述电源部分包括有电池和稳压模块,所述执行机构包括有电机、电机驱动和舵机,所述人机接口包括有拨码开关、无线数据传输模块、蜂鸣器和led。
3、作为进一步的技术方案,所述主控芯片内设置有16位中央处理器、128kbflash存储器、8kb的ram、2kb的eeprom、两个异步串行通信接口、两个串行外围接口和一组8通道的输入捕捉或调制模块。
4、作为进一步的技术方案,所述舵机直接有主控芯片1输出的pwm信号控制,且电机驱动使用h全桥电路。
5、作为进一步的技术方案,所述执行机构内的舵机控制机构和电机控制机构在一起构成汽车跟随控制机构。
6、一种汽车避障方法,包括感知信息、提取信息、发出信号、确定无障碍方向、执行行驶、人机交互和供电,其特征在于:
7、步骤一:感知信息,传感器部分负责感知外部世界的环境信息和汽车自身的状态信息;
8、步骤二:提取信息,分析传感器数据,提取路况信息;
9、步骤三:发出信号,运行控制算法,向执行机构发出动作信号;
10、步骤四:确定无障碍方向,通过主控芯片控制汽车朝无障碍方向行驶;
11、步骤五:执行行驶,负责执行动作信号,实现汽车的前进、变速和转向;
12、步骤六:人机交互,实现模式和参数选择、状态指示、实时监控以及数据存储等人机交互功能;
13、步骤七:供电,负责向各部分提供合适的电源。
14、作为进一步的技术方案,所述步骤一通过感知外部世界的环境信息和汽车自身的状态信息,为汽车完成路况判断和实现汽车的运动控制提供所需的信息。
15、作为进一步的技术方案,所述步骤一中的传感器部分包括光电开关、超声波测距模块和编码器测速模块三个子模块。
16、作为进一步的技术方案,所述步骤四中的主控芯片采用的是16位单片机mc9s12xs128。
17、与现有技术相比,本发明的有益效果是:可自动避障,通过光电开关和超声波测距模块配合识别前方是否有障碍物,在遇到障碍物则通过舵机改变行驶方向,并且电机驱动模块采用pid闭环控制,可以达到速度稳定、快速、准确的控制,使得汽车能够及时制动和恒速运行。
技术特征:
1.一种汽车避障系统,包括主控芯片(1)、电源部分(2)、传感器部分(3)、执行机构(4)和人机接口(5),其特征在于:所述主控芯片(1)分别与电源部分(2)、传感器部分(3)、执行机构(4)和人机接口(5)之间电性连接,且电源部分(2)与执行机构(4)之间电性连接在一起,所述电源部分(2)包括有电池和稳压模块,所述执行机构(4)包括有电机、电机驱动和舵机,所述人机接口(5)包括有拨码开关、无线数据传输模块、蜂鸣器和led。
2.根据权利要求1所述的一种汽车避障系统,其特征在于:所述主控芯片(1)内设置有16位中央处理器、128kbflash存储器、8kb的ram、2kb的eeprom、两个异步串行通信接口、两个串行外围接口和一组8通道的输入捕捉或调制模块。
3.根据权利要求1所述的一种汽车避障系统,其特征在于:所述舵机直接有主控芯片(1)输出的pwm信号控制,且电机驱动使用h全桥电路。
4.根据权利要求1所述的一种汽车避障系统,其特征在于:所述执行机构(4)内的舵机控制机构和电机控制机构在一起构成汽车跟随控制机构。
5.一种汽车避障方法,包括感知信息、提取信息、发出信号、确定无障碍方向、执行行驶、人机交互和供电,其特征在于:
6.根据权利要求5所述的一种汽车避障方法,其特征在于:所述步骤一通过感知外部世界的环境信息和汽车自身的状态信息,为汽车完成路况判断和实现汽车的运动控制提供所需的信息。
7.根据权利要求5所述的一种汽车避障方法,其特征在于:所述步骤一中的传感器部分包括光电开关、超声波测距模块和编码器测速模块三个子模块。
8.根据权利要求5所述的一种汽车避障方法,其特征在于:所述步骤四中的主控芯片采用的是16位单片机mc9s12xs128。
技术总结
本发明公开了一种汽车避障系统及其方法,包括主控芯片、电源部分、传感器部分、执行机构和人机接口,所述主控芯片分别与电源部分、传感器部分、执行机构和人机接口之间电性连接,所述电源部分包括有电池和稳压模块,所述执行机构包括有电机、电机驱动和舵机,所述人机接口包括有拨码开关、无线数据传输模块、蜂鸣器和LED;所述执行机构内的舵机控制机构和电机控制机构在一起构成汽车跟随控制机构。本发明可自动避障,通过光电开关和超声波测距模块配合识别前方是否有障碍物,在遇到障碍物则通过舵机改变行驶方向,并且电机驱动是采用PID闭环控制,可以达到速度稳定、快速、准确的控制,使得汽车能够及时制动和恒速运行。
技术研发人员:苏建欢,陈梦吉,陆正杰,韦庆进,宋华宁,邹清平
受保护的技术使用者:河池学院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!