一种基于管道模型预测控制的卫星编队构型保持方法与流程
1.本发明属于卫星通信技术领域,尤其涉及一种基于管道模型预测控制的卫星编队构型保持方法。
背景技术:
2.地球静止轨道(geo)是当前高轨通信卫星最常用的轨道。geo轨位有限,故往往会将多颗卫星共位放置在同一个或邻近的定点区域内,组成通信卫星星座编队。为了保证卫星编队内卫星相互之间的安全以及星座工作的稳定性,需要定期地进行构型保持控制,避免其因为空间环境摄动等因素导致星座失效。
3.对于卫星编队的控制主要有几何法与代数法两种方式。几何法以轨道根数所代表的相对运动模型为基础,分析编队卫星之间的相对轨道根数,进行轨道设计与摄动分析。代数法以两颗卫星之间的位置矢量为基础,在hill坐标系下描述卫星之间的相对运动,并以此为基础进行相关设计。最经典的方法是利用cwh方程建立相对运动模型,但是该模型具有一定的误差,模型存在的不确定性使其适用的情况极其有限。
技术实现要素:
4.本发明的技术解决问题:克服现有技术的不足,提供一种基于管道模型预测控制的卫星编队构型保持方法,基于此方法,可确定卫星编队内每一颗卫星所需的轨道控制力,使得编队内卫星之间既可以保证安全间隔距离,又可以保持相对稳定的位置关系。
5.为了解决上述技术问题,本发明公开了一种基于管道模型预测控制的卫星编队构型保持方法,包括:
6.建立卫星相对运动模型;
7.确定卫星相对运动模型的状态与控制输入约束;
8.根据确定的卫星相对运动模型的状态与控制输入约束,进行优化问题求解,得到最优控制量;
9.根据求解得到的最优控制量,控制卫星编队内各卫星的推进器点火策略,实现卫星跟踪参考卫星的轨迹为最优轨迹。
10.在上述基于管道模型预测控制的卫星编队构型保持方法中,建立卫星相对运动模型,包括:
11.获得卫星编队内各卫星当前在地心赤道坐标系下的速度位置矢量,并由构型要求确定各个卫星的参考轨道;
12.用cwh方程表示卫星编队内每颗卫星与参考轨道之间的相对运动:
[0013][0014]
[0015][0016]
其中,m表示卫星质量;[δxδyδz]
t
表示卫星在参考卫星的hill坐标系下的位置矢量;f
x
,fy,fz表示卫星在参考卫星的hill坐标系下的推力;a
p,x
,a
p,y
,a
p,z
表示卫星在参考卫星的hill坐标系下的摄动加速度;n表示轨道的平均转速,μe表示地球的引力系数,r表示卫星质心到地心的距离;对于主星来说,参考卫星是假定的一颗虚拟卫星,对于跟随卫星来说,参考卫星即为其相邻的卫星;
[0017]
令卫星相对轨道名义状态卫星相对轨道名义控制推力用代指代指则卫星相对运动模型表示为:
[0018][0019]
其中,a表示系统的状态矩阵,b表示系统的输入矩阵,d表示系统的干扰作用矩阵,a
p
(t)表示总的摄动加速度。
[0020]
在上述基于管道模型预测控制的卫星编队构型保持方法中,
[0021][0022]
在上述基于管道模型预测控制的卫星编队构型保持方法中,卫星编队内共有na颗卫星,包括:1颗主星和n
a-1颗跟随卫星;其中,主星参考轨道为一标准圆轨道;各跟随卫星参考轨道均由其相邻的卫星轨道确定。
[0023]
在上述基于管道模型预测控制的卫星编队构型保持方法中,确定卫星相对运动模型的状态与控制输入约束,包括:
[0024]
对式(1)进行离散化,得到卫星相对运动模型的离散化表达式:
[0025][0026]
其中,ad、bd、dd分别表示矩阵a、b、d离散化后的形式;
[0027]
将卫星相对运动模型的误差连同各类外部不确定性视为系统的加性不确定性w;其中,
[0028]
则,卫星实际的相对运动模型表示如下:
[0029]
x(k+1)=adx(k)+bdu(k)+d
dap
(k)+w
···
(3)
[0030]
其中,x(k)表示卫星相对轨道实际状态,u(k)表示卫星相对轨道实际控制推力;
[0031]
将系统状态与系统输入约束描述为:
[0032]
[0033][0034]
其中,x为x(k)简写,表示卫星相对轨道实际状态集合,x
lb
表示卫星相对轨道实际状态下界,x
ub
表示卫星相对轨道实际状态上界,u为u(k)简写,表示卫星相对轨道实际控制推力集合,u
lb
表示卫星相对轨道实际控制推力下界,u
ub
表示卫星相对轨道实际控制推力上界;
[0035]
考虑以下反馈控制器:
[0036][0037]
其中,k表示反馈矩阵;表示真实卫星相对位置x(k)与模型预示的位置之间的误差,
[0038]
则,对应的误差系统为:
[0039][0040]
则有:
[0041][0042]
其中,φk表示误差系统鲁棒正向不变集;
[0043]
则,在任意时刻k,误差系统的真实状态满足:
[0044][0045]
其中,表示两个集合间的闵可夫斯基和;
[0046]
则,卫星相对运动模型的状态与控制输入约束表示为:
[0047][0048]
其中,表示两个集合间的闵可夫斯基差。
[0049]
在上述基于管道模型预测控制的卫星编队构型保持方法中,根据确定的卫星相对运动模型的状态与控制输入约束,进行优化问题求解,得到最优控制量,包括:
[0050]
定义代价函数j:
[0051][0052]
其中,n
p
表示k时刻时的预测步长,表示预测状态,表示终端状态,q表示状态权值矩阵、r表示控制权值矩阵、p表示终端权值矩阵;
[0053]
对于卫星编队内的所有卫星,每颗卫星单独求解下述优化问题:
[0054][0055]
其中,和分别表示求解式(12)得到的有限时域内的最优控制量与最优状态;
[0056]
则式(6)所定义的次级控制器表示为:
[0057][0058]
通过式(13),求解得到最优控制量u
*
(k)。
[0059]
本发明具有以下优点:
[0060]
本发明公开了一种基于管道模型预测控制的卫星编队构型保持方法,基于此方法,可确定卫星编队内每一颗卫星所需的轨道控制力,使得编队内卫星之间既可以保证安全间隔距离,又可以保持相对稳定的位置关系。
附图说明
[0061]
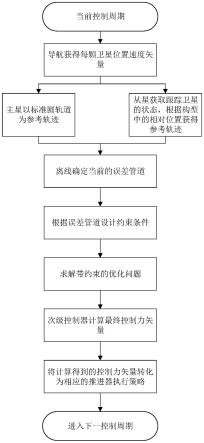
图1是本发明实施例中一种基于管道模型预测控制的卫星编队构型保持方法的流程示意图。
具体实施方式
[0062]
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
[0063]
本发明的核心思想之一在于:将空间环境、测定轨误差等不确定性以管道的方式叠加在标准运动参考模型之上来确定编队内每颗星的误差管道控制模型。对于卫星编队的主星而言(一般为一颗)其标准运动参考模型即为其自身的理想轨道,从星(其余卫星)的标准运动参考模型可根据与主星的相对位置关系得到。然后根据设定好的约束条件对控制模型进行优化,确定轨道控制力,使每一颗星都去跟踪其参考轨迹,最终实现卫星轨道编队构型的构型保持。本发明所述的一种基于管道模型预测控制的卫星编队构型保持方法,包括:在自主导航结果的基础上,卫星编队内的卫星获得当前在地心赤道坐标系(以地心为原点,x轴指向春扥点,z轴垂直于赤道面,与地球自转角速度矢量一致,y轴构成右手直角坐标系)下的速度位置矢量。根据编队构型要求,确定每颗卫星的参考轨迹。利用cwh方程,构建卫星与其参考轨迹之间的相对运动模型,离散化之后得到相对运动的迭代模型。由于利用cwh方程所构建的相对运动迭代模型本身存在着不确定性,以及由于导航误差所导致的不确定性,卫星实际运动状态与模型所预示的状态存在偏差。将这种偏差视作模型的加性不确定,构建以求解模型得到的卫星状态中心,以其最大误差为边界的集合,称为误差管道。将误差管道考虑到后续控制器优化问题的设计中。模型预测控制器。模型预测控制是基于滚动时域优化的一种控制方法,在每一个控制周期内迭代求解优化问题。本发明基于模型预测控制设计静卫星相对位置保持的控制器,利用离散化的迭代模型,对系统未来n步内的状态进
行预测,并且在考虑包括误差管道在内的系统约束情况下,求解优化问题。通过求解最优控制序列从而得到当前时刻的对编队内每颗卫星的控制量。根据控制给出的控制量,转换为对应推进器的工作策略。
[0064]
如图1,在本实施例中,该基于管道模型预测控制的卫星编队构型保持方法,包括:
[0065]
步骤1,建立卫星相对运动模型。
[0066]
在本实施例中,设卫星编队内共有na颗卫星,其中有1颗主星和n
a-1颗跟随卫星。其中,主星参考轨道为一标准圆轨道;除主星外,每颗跟随卫星参考轨道均由其相邻的卫星轨道确定。获得编队内各卫星当前在地心赤道坐标系(以地心为原点,x轴指向春分点,z轴垂直于赤道面,与地球自转角速度矢量一致,y轴构成右手直角坐标系)下的速度位置矢量,并由构型要求确定其参考轨迹。定义hill坐标系(以卫星质心为原点,x轴方向为地心-卫星连线方向向外;y轴方向沿卫星线速度方向;z轴构成右手正交坐标系),对于编队内任意一颗卫星与其参考轨道,用cwh方程表示每颗卫星与参考轨迹之间的相对运动:
[0067][0068][0069][0070]
其中,m表示卫星质量;[δxδyδz]
t
表示卫星在参考卫星的hill坐标系下的位置矢量;f
x
,fy,fz表示卫星在参考卫星的hill坐标系下的推力;a
p,x
,a
p,y
,a
p,z
表示卫星在参考卫星的hill坐标系下的摄动加速度;n表示轨道的平均转速,μe表示地球的引力系数,r表示卫星质心到地心的距离;对于主星来说,参考卫星是假定的一颗虚拟卫星,对于跟随卫星来说,参考卫星即为其相邻的卫星。
[0071]
令卫星相对轨道名义状态卫星相对轨道名义控制推力用代指代指则卫星相对运动模型表示为:
[0072][0073][0074]
其中,a表示系统的状态矩阵,b表示系统的输入矩阵,d表示系统的干扰作用矩阵,a
p
(t)表示总的摄动加速度。
[0075]
对式(1)进行离散化,得到卫星相对运动模型的离散化表达式:
[0076][0077]
其中,ad、bd、dd分别表示矩阵a、b、d离散化后的形式;
[0078]
步骤2,确定卫星相对运动模型的状态与控制输入约束。
[0079]
在本实施例中,确定卫星相对运动模型的状态与控制输入约束,也即构建描述不确定性的误差管道。将卫星相对运动模型的误差连同各类外部不确定性视为系统的加性不确定性w,那么,卫星实际的相对运动模型可以表示为:
[0080]
x(k+1)=adx(k)+bdu(k)+d
dap
(k)+w
···
(3)
[0081]
其中,x(k)表示卫星相对轨道实际状态,u(k)表示卫星相对轨道实际控制推力。
[0082]
同时,系统状态与系统输入约束可以描述为:
[0083][0084][0085]
其中,x为x(k)简写,表示卫星相对轨道实际状态集合,x
lb
表示卫星相对轨道实际状态下界,x
ub
表示卫星相对轨道实际状态上界,u为u(k)简写,表示卫星相对轨道实际控制推力集合,u
lb
表示卫星相对轨道实际控制推力下界,u
ub
表示卫星相对轨道实际控制推力上界。
[0086]
定义真实卫星相对位置与模型预示的位置之间的误差:
[0087][0088]
考虑以下反馈控制器:
[0089][0090]
其中,k表示反馈矩阵;表示真实卫星相对位置x(k)与模型预示的位置之间的误差,
[0091]
那么可以得到对应的误差系统:
[0092][0093]
对于误差系统,定义其鲁棒正向不变集为φk,则有:
[0094][0095]
那么,在任意时刻k,误差系统的真实状态满足:
[0096][0097]
其中,表示两个集合间的闵可夫斯基和。
[0098]
那么,卫星相对运动模型的状态与控制输入约束表示为:
[0099][0100]
其中,表示两个集合间的闵可夫斯基差。
[0101]
步骤3,根据确定的卫星相对运动模型的状态与控制输入约束,进行优化问题求解,得到最优控制量。
[0102]
在本实施例中,该步骤3也即基于管道的模型预测控制器优化问题求解问题。设当前时刻为k,k时刻时的预测步长为n
p
,则定义代价函数j如下:
[0103][0104]
其中,表示预测状态,表示终端状态,q表示状态权值矩阵、r表示控制权值矩阵、p表示终端权值矩阵。
[0105]
对于卫星编队内的所有卫星,每颗卫星单独求解下述优化问题:
[0106][0107]
其中,和分别表示求解式(12)得到的有限时域内的最优控制量与最优状态。则式(6)所定义的次级控制器表示为:
[0108][0109]
通过式(13),求解得到最优控制量u
*
(k)。
[0110]
步骤4,根据求解得到的最优控制量,控制卫星编队内各卫星的推进器点火策略,实现卫星跟踪参考卫星的轨迹为最优轨迹。
[0111]
在本实施例中,求解出来的最优控制量u
*
(k)表示卫星在hill坐标系下控制力。实际的静止轨道卫星一般采用电推力的星上推进器,根据星上推进器分布不同,考虑到实际情况,需要将控制量进行解算,获得当前的实际推进器点火策略。通过仿真验证,本发明的方法能够实现精度较高的卫星编队构型保持任务。
[0112]
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
[0113]
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1