一种割草机器人的沿线回站方法、系统、设备及存储介质与流程
本发明涉及移动机器人,尤其涉及一种割草机器人的沿线回站方法、系统、设备及存储介质。
背景技术:
1、一般地,为了避免割草机器人工作时驶出工作区域边界,可以在工作区域周围设置,同时为了方便充电,边界线上设置有充电基站,当割草机器人在修剪草坪电量不足时,可以自动返回基站进行回归充电。但通常地割草机器人回归充电时均沿着固定的线路返回,较多次数的沿着同样的路线返回充电,割草机器人会对该线路上的草坪进行反复碾压,导致该路线上的草坪被碾坏,严重时,该路线上的草坪会被碾压成光地。
技术实现思路
1、本发明要解决的技术问题在于,针对相关技术存在的至少一个缺陷,提供一种割草机器人的沿线回站方法、系统、设备及存储介质。
2、本发明解决其技术问题所采用的技术方案是:一种割草机器人的沿线回站方法,基站上设置有可发射信号的信号源,所述方法包括以下步骤:
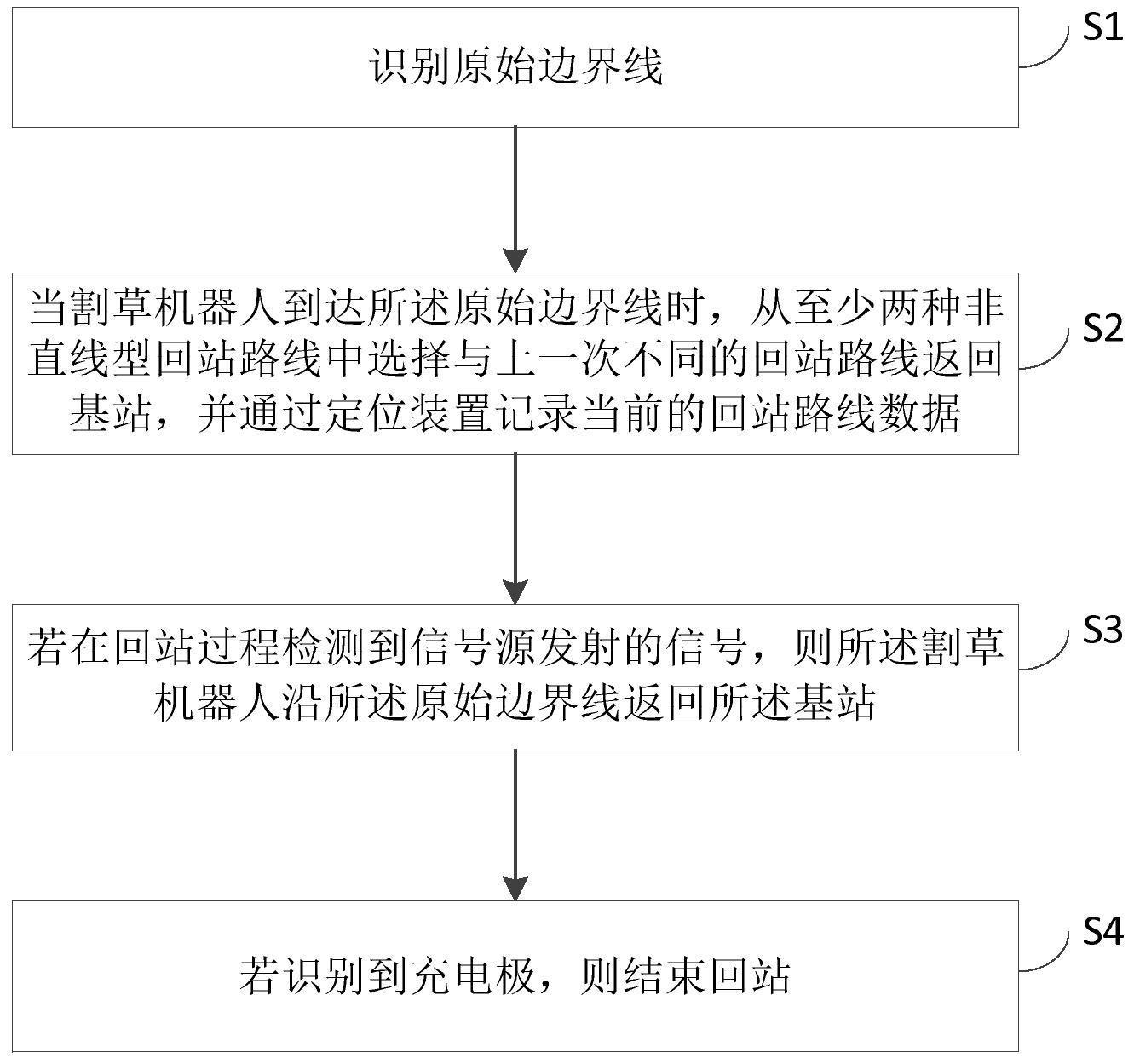
3、s1:识别原始边界线;
4、s2:当割草机器人到达所述原始边界线时,从至少两种非直线型回站路线中选择与上一次不同的回站路线返回基站,并通过定位装置记录当前的回站路线数据;
5、s3:若在回站过程检测到信号源发射的信号,则所述割草机器人沿所述原始边界线返回所述基站;
6、s4:若识别到充电极,则结束回站。
7、在一些实施例中,所述s1还包括:
8、根据所述割草机器人上的边界检测传感器,获取所述基站的防撞边界线;并根据所述防撞边界线与原始边界线得到预设路线规划区域。
9、在一些实施例中,所述至少两种非直线型回站路线为以所述原始边界线的某一位置为起始点在所述预设路线规划区域内形成的非直线型回站路线,其包括折线形、半圆形、其他弯折或弯曲形状的回站路线。
10、在一些实施例中,所述基站设置在所述原始边界线上,所述防撞边界线设置在所述基站的周侧且与所述原始边界线连接形成封闭的防撞区域,在所述防撞区域内能够接收到所述信号源发射的信号。
11、在一些实施例中,所述s2包括:
12、接收在所述预设路线规划区域内返回所述基站的历史回站路线数据,根据所述历史回站路线数据控制割草机器人在预设路线规划区域内规划出多种非直线型回站路线,并选择与上一次不同的至少一种回站路线返回所述基站。
13、在一些实施例中,所述历史回站路线数据包括历史回站路线的坐标信息、转弯半径以及行走角度。
14、在一些实施例中,所述s2还包括:根据记录的回站路线数据不断地更新历史回站路线数据。
15、本发明还提供一种割草机器人的沿线回站系统,基站上设置有可发射信号的信号源,所述系统包括:
16、识别模块,用于识别原始边界线;
17、回站路线选择模块,用于当割草机器人到达所述原始边界线时,从至少两种非直线型回站路线中选择与上一次不同的回站路线返回基站,并通过定位装置记录当前的回站路线数据;
18、原始边界线回站模块,用于若在回站过程检测到信号源发射的信号,则所述割草机器人沿所述原始边界线返回所述基站;
19、结束回站模块,用于若识别到充电极,则结束回站。
20、本发明还提供一种电子设备,包括处理器和存储有计算机可读指令的存储器,所述处理器被配置在执行所述计算机可读指令时,执行上述任一项所述的方法。
21、本发明还提供一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现上述任一项所述的方法。
22、通过实施本发明,具有以下有益效果:本发明通过当割草机器人到达所述原始边界线时,从至少两种非直线型回站路线中选择与上一次不同的回站路线返回基站,并通过定位装置记录当前的回站路线数据,可以避免每次返回基站均沿着同一条路线,严重破坏草坪。
技术特征:
1.一种割草机器人的沿线回站方法,基站上设置有可发射信号的信号源,其特征在于,所述方法包括以下步骤:
2.根据权利要求1所述的割草机器人的沿线回站方法,其特征在于,所述s1还包括:
3.根据权利要求2所述的割草机器人的沿线回站方法,其特征在于,所述至少两种非直线型回站路线为以所述原始边界线的某一位置为起始点在所述预设路线规划区域内形成的非直线型回站路线,其包括折线形、半圆形、其他弯折或弯曲形状的回站路线。
4.根据权利要求2所述的割草机器人的沿线回站方法,其特征在于,所述基站设置在所述原始边界线上,所述防撞边界线设置在所述基站的周侧且与所述原始边界线连接形成封闭的防撞区域,在所述防撞区域内能够接收到所述信号源发射的信号。
5.根据权利要求3所述的割草机器人的沿线回站方法,其特征在于,所述s2包括:
6.根据权利要求5所述的割草机器人的沿线回站方法,其特征在于,所述历史回站路线数据包括历史回站路线的坐标信息、转弯半径以及行走角度。
7.根据权利要求5所述的割草机器人的沿线回站方法,其特征在于,所述s2还包括:根据记录的回站路线数据不断地更新历史回站路线数据。
8.一种割草机器人的沿线回站系统,其特征在于,基站上设置有可发射信号的信号源,所述系统包括:
9.一种电子设备,其特征在于,包括处理器和存储有计算机可读指令的存储器,所述处理器被配置在执行所述计算机可读指令时,执行如权利要求1-7中任一项所述的方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该程序被处理器执行时实现如权利要求1-7中任一项所述的方法。
技术总结
本发明提供一种割草机器人的沿线回站方法、系统、设备及存储介质,基站上设置有可发射信号的信号源,该方法包括以下步骤:S1:识别原始边界线;S2:当割草机器人到达原始边界线时,从至少两种非直线型回站路线中选择与上一次不同的回站路线返回基站,并通过定位装置记录当前的回站路线数据;S3:若在回站过程检测到信号源发射的信号,则割草机器人沿原始边界线返回基站;S4:若识别到充电极,则结束回站。本发明通过当割草机器人到达原始边界线时,从至少两种非直线型回站路线中选择与上一次不同的回站路线返回基站,并通过定位装置记录当前的回站路线数据,可以避免每次返回基站均沿着同一条路线,严重破坏草坪。
技术研发人员:姚佳兵,郝帅
受保护的技术使用者:深圳拓邦股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!