一个纠偏控制器控制两个执行器的控制系统及控制方法与流程
1.本发明涉及纠偏控制器的技术领域,具体为一个纠偏控制器控制两个执行器的控制系统及控制方法。
背景技术:
2.常规的纠偏控制器,只能驱动一个执行器。随着市场的发展,一些场合需要使用双轴,例如,双放卷设备,即需要一个纠偏控制器能够驱动两个执行器。传统的纠偏控制器是无法满足这样的应用工况的,如果在纠偏控制器上再增加一路执行器驱动电路,既会增加硬件成本,也会增加纠偏控制器体积。
技术实现要素:
3.基于此,有必要提供一个纠偏控制器控制两个执行器的控制系统及控制方法。
4.一个纠偏控制器控制两个执行器的控制系统,包括纠偏控制器、第一执行器、第二执行器、信号切换单元,所述纠偏控制器的信号输出端与信号切换单元的信号输入端连接,所述信号切换单元的信号输出端分别与第一执行器或第二执行器的信号输入端连接。
5.在其中一个实施例中,所述信号切换单元包括至少一个继电器。
6.一个纠偏控制器控制两个执行器的方法,s1、开启第一执行器并完成自动行程;s2、判断第一执行器是否完成自动行程,是则进行下一步;s3、存储第一执行器的当前位置信息和总行程信息;s4、开启第二执行器并完成自动行程;s5、判断第二执行器是否完成自动行程,是则进行下一步;s6、存储第二执行器的当前位置信息和总行程信息;s7、纠偏控制器根据外部io信号判断当前执行器是否为有效执行器,是则进行下一步骤;s8、纠偏控制器控制当前执行器进行纠偏控制。
7.在其中一个实施例中,在s2中,所述第一执行器未完成自动行程,则返回s1,直至第一执行器完成自动行程。
8.在其中一个实施例中,在s5中,所述第二执行器未完成自动行程,则返回s4,直至第二执行器完成自动行程。
9.在其中一个实施例中,在s7中,纠偏控制器根据外部io信号判断当前执行器为非有效执行器,则通过信号切换单元切换到有效执行器。
10.在其中一个实施例中,所述纠偏控制器实时监控是否有外部io信号。
11.上述一个纠偏控制器控制两个执行器的控制系统及控制方法,通过信号切换单元的设置,纠偏控制器根据外部io信号来控制第一执行器或第二执行器进行纠偏工作,做到了通过一个纠偏控制器控制两个执行器,使纠偏控制器应用场景更加广泛,增加了应用的
灵活性,降低了应用成本。
附图说明
12.图1为本发明一实施例的一个纠偏控制器控制两个执行器的控制系统结构示意图;图2为图1本发明一实施例的一个纠偏控制器控制两个执行器的控制系统的信号切换单元电路图;图3为本发明一实施例的一个纠偏控制器控制两个执行器的控制方法的流程图。
具体实施方式
13.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
14.需要说明的是,当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。相反,当元件被称作“直接”与另一元件连接时,不存在中间元件。
15.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施方式的目的,不是旨在于限制本发明。本文所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
16.如图1和图2所示,一个纠偏控制器控制两个执行器的控制系统,包括纠偏控制器、第一执行器、第二执行器、信号切换单元,所述纠偏控制器的信号输出端与信号切换单元的信号输入端连接,所述信号切换单元的信号输出端分别与第一执行器或第二执行器的信号输入端连接。
17.在其中一个实施例中,所述信号切换单元包括至少一个继电器。
18.如图3所示,一个纠偏控制器控制两个执行器的方法,s1、开启第一执行器并完成自动行程;s2、判断第一执行器是否完成自动行程,是则进行下一步;s3、存储第一执行器的当前位置信息和总行程信息;s4、开启第二执行器并完成自动行程;s5、判断第二执行器是否完成自动行程,是则进行下一步;s6、存储第二执行器的当前位置信息和总行程信息;s7、纠偏控制器根据外部io信号判断当前执行器是否为有效执行器,是则进行下一步骤;s8、纠偏控制器控制当前执行器进行纠偏控制。
19.在其中一个实施例中,在s2中,所述第一执行器未完成自动行程,则返回s1,直至第一执行器完成自动行程。
20.在其中一个实施例中,在s5中,所述第二执行器未完成自动行程,则返回s4,直至
第二执行器完成自动行程。
21.在其中一个实施例中,在s7中,纠偏控制器根据外部io信号判断当前执行器为非有效执行器,则通过信号切换单元切换到有效执行器。
22.在其中一个实施例中,所述纠偏控制器实时监控是否有外部io信号。
23.在双执行器的应用中,任何时候都只需要一个执行器处于运行状态,而另一个执行器则处于预备状态。为了最小程度的对原有控制器进行修改,可以在使用原有执行器驱动电路作为两路执行器的驱动源,增加一路外部io信号,通过这个信号对信号切换单元进行控制。而信号切换单元可以通过多个继电器实现对驱动信号实现一进二出。在原有纠偏控制器上,只需要增加双轴切换控制流程即可。
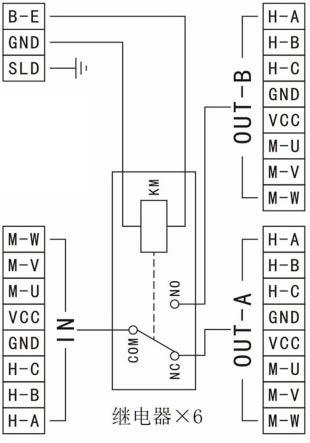
24.电机驱动mtr根据电机类型的不同,会有不同的驱动信号。信号切换单元根据信号数量,对应继电器的数量。以有感直流无刷为例,电机驱动为3条驱动线,3条霍尔信号线和2条电源线,继电器需要6路即可。i/o打开时,b-e处于断开状态,所有继电器处于常开状态,执行器选择为a轴,即为第一执行器;反之,i/o闭合时,b-e与24v接通,信号切换单元上的所有继电器处于导通状态,执行器切换到b轴,即第二执行器。
25.1)b-e为继电器控制信号,该信号为24v电源,其控制输出由纠偏控制器内部的电子开关确定;2)信号切换单元上有6个继电器,分别为h-a、h-b、h-c和m-u、m-v、m-w提供信号切换。
26.3)每个继电器负责一路信号进,两路信号出。常闭时与out-a连接;常开时与out-b连接;4)vcc和gnd直接通过pcb上的连线连接。
27.进一步地,纠偏控制器一拖二和传统的一拖一一样的,使用之前必须通过自动行程获取两路第一执行器和第二执行器的当前位置信息和第一执行器和第二执行器可以移动的总行程信息。
28.自动行程完成后需要对第一执行器和第二执行器当前位置和总行程数据进行存储。无刷电机获取的位置是相对位置,这个位置需要存储,以保证下次上电恢复到当前位置,否则掉电后无法知道这个相对位置。
29.自动行程完成后,纠偏控制器可以根据当前外部io信号的状态确认当前的有效执行器,并切换到该执行器。外部io可以定义为:高电平为a轴,即第一执行器,低电平为b轴,即第二执行器。通过这个io可外接按键,实现远程切换。也可以通过控制器显示屏进行切换。
30.控制器实时监控 是否有外部io信号进行执行器切换,如果有执行器切换信号,就对执行器进行切换,如果没有,则正常对当前执行器进行各种纠偏控制。
31.这样,一个纠偏控制器控制两个执行器的控制系统及控制方法,通过信号切换单元的设置,纠偏控制器根据外部io信号来控制第一执行器或第二执行器进行纠偏工作,做到了通过一个纠偏控制器控制两个执行器,使纠偏控制器应用场景更加广泛,增加了应用的灵活性,降低了应用成本。
32.以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存
在矛盾,都应当认为是本说明书记载的范围。
33.以上所述实施例仅表达了本发明的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进,这些都属于本发明的保护范围。因此,本发明专利的保护范围应以所附权利要求为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1