一种基于同步实时以太网的多轴电液伺服从站控制系统的制作方法
1.本发明涉及一种电液伺服从站控制系统,具体地说,是一种基于同步实时以太网的多轴电液伺服从站控制系统。
背景技术:
2.近年来,各类工业产品的结构日趋复杂化、整体化、大型化,产品对于环境振动的适应性指标显得越发重要,对模拟电液振动试验平台的精度、响应速度提出了更高的要求。随着工业现场总线的发展,开发出了profibus、can、modbus、ethercat等总线技术,以更好地满足试验现场对于设备性能的高要求,但目前的电液伺服从站控制系统并不能满足电液伺服控制的同步实时性控制要求。ethercat高速以太网总线技术具有同步时钟机制,其响应速度快、传输精度高、拓扑结构灵活、同步性高等优点,是目前多轴电液伺服驱动控制、多轴电机伺服驱动控制、同步数据采集控制的最理想工业以太网解决方案。
技术实现要素:
3.针对上述现有技术中存在的不足之处,本发明提供了一种基于同步实时以太网的多轴电液伺服从站控制系统,该多轴电液伺服从站控制系统以满足电液伺服控制的同步实时性控制要求。
4.为实现上述技术目的,本发明采用的技术方案如下:
5.一种基于同步实时以太网的多轴电液伺服从站控制系统,包括从站微处理器和ethercat从站控制器;
6.所述从站微处理器由stm32核心芯片与电源、晶振、复位按键以及sw接口组成,模拟量、开关量输入信号通过i/o口接入stm32核心芯片,stm32核心芯片的输出信号通过da芯片转为电压信号,经过程控电压转换器转换为电流信号,最后由多路复用器输出多路不同电流信号;
7.ethercat从站控制器由ax58100核心芯片与晶振、电源和复位按键组成,通过i2c总线连接eeprom进行ethercat从站控制器配置信息存储,两个集成phy芯片经过隔离变压器后与rj45相连构成网络接口;stm32核心芯片通过fmc总线与ax58100进行pdi数。
8.作为本发明的一种优选方案,stm32通过fmc总线外扩一块sdram进行上位机指令和数据的缓存。
9.作为本发明的一种优选方案,由stm32微处理器采集液压伺服阀lvdt位置传感器及速度传感器反馈信号。
10.作为本发明的一种优选方案,stm32核心芯片输出+10v和-10v电压进行液压缸控制,对stm32的数字输出信号进行数模转换,选用dac8563芯片作为da主芯片;stm32通过spi总线将数据传输给dac8563,dac8563经过数模转换后输出两路独立0~5v电压信号。
11.作为本发明的一种优选方案,将dac转换得到的两路0~5v电压经过电压转换电路,转换为两路-10v~+10v电压输出,电压转换选用ina128芯片。
12.作为本发明的一种优选方案,经过数模转换和电压转换电路后,添加程控电压-电流转换器和多路复用器来进行电流转换以及多路选择输出10ma、20ma、40ma和50ma电流信号输出;在电压、电流输出之前,对电压转换电路以及电压输出、电流输出电路进行电气隔离,使用iso122u隔离放大器。
13.作为本发明的一种优选方案,多路复用器选用tmux7212芯片。
14.作为本发明的一种优选方案,ax58100的端口0和端口2各集成了一块phy芯片,集成phy芯片通过网络隔离变压器后与外部贴片式rj45接口连接,完成ethercat网络通信物理层硬件接口的实现。
15.作为本发明的一种优选方案,ax58100将数据经过内部处理后通过pdi过程数据接口经过fsmc总线传输给stm32f429,stm32通过sdo、pdo映射接收数据后会对数据进行应用层处理,通过dma传输给外设通道,最后再通过stm32本身的外设驱动与外部器件电路进行信息交互。
16.本发明的技术效果是:
17.1、该多轴电液伺服从站控制系统以满足多轴高动态电液伺服控制的同步实时性控制要求,ethercat总线数据传输延迟小于100us。
18.2、该多轴电液伺服从站控制系统底层设计有多通道adc驱动程序模块、多通道dac驱动程序模块、外扩展存储器驱动模块、spi接口驱动模块、多类型编码器(ssi、pwm、ab相编码器)采集程序模块,以及pid参数自适应整定模块等,满足多功能扩展的需求。
19.3、该多轴电液伺服从站控制系统采用ethercat连接器rj45进行多从站级联扩展,最多扩展轴数256轴,ethercat传输速度100mbps,ethercat从站之间传输距离为100m。
20.4、该基于同步实时以太网的多轴电液伺服从站控制系统通过试验波形可以看出,系统跟踪正弦波位移整体效果较好,实际值与理论值重合度较高,实际位移波形曲线平滑,超调量较小。
附图说明
21.图1为ethercat从站系统硬件总体框架的流程图;
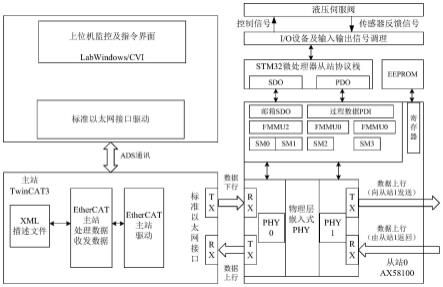
22.图2为基于同步实时以太网的多轴电液伺服从站控制系统的架构图;
23.图3为从站系统架构图;
24.图4为数模转换dac电路图;
25.图5为电压转换电路图;
26.图6为电气隔离电路图;
27.图7为多路复用及电流输出电路图;
28.图8为复位电路图;
29.图9为外扩eeprom电路图;
30.图10为10phy接口电路图;
31.图11为pdi异步局部总线通信接口电路图;
32.图12为ethercat系统软件架构图;
33.图13为ethercat系统从站软件架构图;
34.图14为主函数流程图;
35.图15为数据采集函数流程图;
36.图16为模糊自适应pid程序流程图;
37.图17为液压缸正弦波位移跟踪图(1hz);
38.图18为液压缸正弦波位移跟踪图(2hz);
39.图19为液压缸正弦波位移跟踪图(混合波形);
40.图20为液压缸方波位移跟踪图(1hz)。
具体实施方式
41.下面结合附图和实施例对本发明技术方案进一步说明。
42.1、一种基于同步实时以太网的多轴电液伺服从站控制系统,包括从站微处理器和ethercat从站控制器,如图1和图2所示。
43.ethercat从站系统硬件总体框架如图1所示。
44.从站微处理器由stm32核心芯片与电源、晶振、复位按键以及sw接口组成,模拟量、开关量输入信号通过i/o口接入stm32核心芯片,stm32核心芯片的输出信号通过da芯片转为电压信号,经过程控电压转换器转换为电流信号,最后由多路复用器输出多路不同电流信号。在试验中具体使用哪一路电流输出由stm32来选择;同时,stm32通过fmc总线外扩一块sdram进行上位机指令和数据的缓存。从站微处理器主要完成的是ethercat协议栈的编制、coe应用层协议的设计以及数据信号的输入输出处理,选用stm32f429作为从站微处理器芯片。
45.ethercat从站控制器(esc)由ax58100核心芯片与晶振、电源和复位按键组成,通过i2c总线连接eeprom进行ethercat从站控制器配置信息存储,两个集成phy芯片经过隔离变压器后与rj45相连构成网络接口;stm32核心芯片通过fmc总线与ax58100进行pdi数据传输。
46.1.1、基于同步实时以太网的多轴电液伺服从站控制系统的架构,如图2所示。
47.针对多轴液压伺服从站控制器,核心在于单轴液压从站系统的硬件设计、协议栈开发以及控制算法设计。本发明基于ethercat从站的技术方案为“从站控制器(esc)+微处理器(mcu)”模式。
48.(1)系统集成架构设计
49.主站由pc机搭载twincat3软件实现,通过标准以太网接口与ax58100芯片的以太网接口引脚连接。数据链路层的信息传输由ethercat芯片ax58100完成。应用层在stm32微处理器上实现,基于stm32开发canopen应用层协议、建立对象字典、编写coe状态机处理等从站协议栈软件。
50.整个系统运行分为两种状态。第一种是由底层微处理器采集信息并处理后,发送给主站及上位机的过程,称为数据上行过程。在数据上行过程中,由stm32微处理器采集液压伺服阀lvdt位置传感器及速度传感器反馈信号以及其它信号调理电路的数字量、模拟量信号,将需要交换或更新的信息插入以太网报文中并传送到下一从站。以太网报文遍历网段中的所有从站并完成数据交换后返回主站,交由twincat3进行信息处理。主站将接收到的数据经过相应处理之后通过ads通信发送给由labwindows/cvi开发的人机交互界面实现数据和波形的展示及监控。第二种是在上位机输入需要发送的数据、指令或请求后,由ads
协议传输到主站twincat3中,主站将需要数据交换的信息插入以太网报文中后发送给网段中的第一个从站,第一个从站完成数据交换后顺行发送给下一从站。完成数据上行和数据下行过程即完成了一次完整的主从站信息交换。
51.(2)从站设计
52.从站系统架构如图3所示,ethercat系统的从站通常由四个部分组成:
53.①
ethercat从站控制器:也即esc(ethercat slave controller)。由从站控制芯片搭载,负责实现从站的通信功能,且此通信功能独立于从站微控制器。数据下行时,ethercat数据帧会从主站发出并依顺序通过网段中的各个从站,每个从站的esc会提取出报文中发送给本从站的信息并将需要交换的信息插入报文中,最后将报文发送给下一从站。整个过程由硬件实现,保证了极快的通信速度。
54.②
从站微处理器:从站微处理器会从esc中读取信息实现对外围设备的控制,也会将设备信息反馈给esc并上传回主站。一般从站微处理器通过spi或fsmc总线与esc芯片连接。
55.③
物理层器件:一般需要使用phy芯片、隔离变压器等物理层器件实现物理层信息传输。
56.④
应用层器件:由从站微处理器连接其它应用层器件,以实现对各类信号的采集以及相应外围设备的控制。
57.控制信号输出电路:
58.1)数模转换电路:如图4所示为dac电路。本发明中输出+10v和-10v电压进行液压缸控制,对stm32f429的数字输出信号进行数模转换,选用dac8563芯片作为da主芯片。stm32f429通过spi总线将数据传输给dac8563,dac8563经过数模转换后输出两路独立0~5v电压信号。
59.2)电压转换电路:将dac转换得到的两路0~5v电压经过电压转换电路,转换为两路-10v~+10v电压输出,这个电压转换工作由ina128芯片来完成,如图5所示。
60.3)电气隔离电路:经过数模转换和电压转换电路后,就得到了两路的-10v~+10v电压输出。本实施例还要转换为多路“10ma”、“20ma”、“40ma”和“50ma”电流信号输出,添加程控“电压-电流”转换器和多路复用器来进行电流转换以及多路选择输出。在此之前需要对电压转换电路以及电压输出、电流输出电路进行电气隔离,使用iso122u精密低成本隔离放大器,如图6所示。
61.4)多路复用及电流转换电路:多路复用及电流转换电路如图7所示。
62.多路复用器选用的是tmux7212芯片,复用器共有4路可选,分别为“s1-d1”、“s2-d2”、“s3-d3”、“s4-d4”,选择第几路由stm32f429决定:stm32f429的4个gpio口连接到多路复用芯片的“sel1”~“sel4”引脚,将某一sel引脚置1即可使用该通路。不同通路“dx”引脚通过不同阻值的电阻接地,当整个电路稳定后即可在放大器的反向端得到所需电流。
63.5)复位电路:复位电路如图8所示。外部复位源则由rstn引脚触发,低电平有效。为了避免电源的抖动或者失效对芯片功能模块造成损伤,在复位引脚加入一个电源监控复位芯片vp811。该芯片可以在电源低于预设的复位阈值时发出复位信号,并且在电源电压恢复后持续至少140ms。同时,在该芯片的“!mr”引脚输入低电平也可以触发“!reset”引脚的复位信号。这样就可以实现电源监控复位的同时也可以采取人为外部复位。
64.6)外扩eeprom电路:ax58100在上电初始化或复位时,需要从eeprom中加载从站信息(esi),这些信息包括esc芯片的生产商、系列、pdi配置、邮箱以及同步管理器配置等。ax58100可以支持的eeprom容量在1kbit~4mbit之间,实际使用时需要在第19引脚进行下拉或上拉来引导配置不同容量的eeprom芯片。当该引脚下拉为0时,引导eeprom容量大小为1kbit~16kbit;当该引脚上拉为1时,引导eeprom容量大小为32kbit~4mbit。
65.本实施例对ax58100芯片利用其i2c总线外扩一块bl24c512a-parc型号的eeprom,容量为512kbit,因此需要在ax58100的19引脚(也即“eep_size”信号引脚)进行上拉处理。i2c总线是一种双向二线制同步串行总线。且其连接方式简单,只需scl时钟线与sda数据线即可,数据只在时钟的高电平周期有效。值得注意的是,i2c总线输出方式为开漏输出,如果不接上拉电阻则会失去输出高电平的能力,因此根据规定scl和sda线均需要接上拉电阻。wp引脚拉高则激活写保护功能。外扩eeprom电路如图9所示。
66.7)phy接口电路:ax58100的端口0和端口2各集成了一块phy芯片,完全符合100base-tx以太网标准。phy通信模式有铜缆模式和光线模式两种,在实际使用中通过ax58100的第40引脚(p0_fiber)、41引脚(p1_fiber)进行芯片配置引导。本实施例中应用为铜缆模式,将两个引脚进行上拉为1处理即可。以端口0为例,“p0_txop”和“p0_txon”分别为phy0的差分发送正信号引脚和差分发送负信号引脚,“p0_rxip”和“p0_rxin”分别为phy0的差分接收正信号引脚和差分接收负信号引脚,“rset_bg”引脚需要接12kω的phy片外偏置电阻。具体phy接口电路如图10所示。
67.网络隔离变压器选用磁联达的g2436s型号产品。集成phy芯片通过网络隔离变压器后与外部贴片式rj45接口连接,完成ethercat网络通信物理层硬件接口的实现。每一个从站的接收端口与主站或上一从站的发送端口连接,最后一个从站的发送端口不用连接,最终形成完整通信链路。
68.8)pdi过程数据通信接口电路:采用异步局部总线方式与外部微控制器进行过程数据传输的接口。ax58100支持14位局部地址总线,其中地址线的0~13位与微控制器连接,14~15位浮空即可。lrdy(local bus ready)引脚指示局部总线准备就绪,eep_done引脚指示局部总线准备好。lint引脚连接到微控制器的irq作为同步信号sync0的中断触发信号,连接如图11所示。异步局部总线方式上拉位置为lfcsn(local bus function select)引脚,同时也都需要微控制器的cs片选信号对ax58100进行选择。
69.2、ethercat系统软件架构
70.从站软件系统主要任务是ethercat状态机处理、应用层数据接口实现、邮箱数据和过程周期性数据传输以及微处理器中输入输出信号的数据处理等。
71.本实施例采用的整体系统架构是“pc+从站控制器+微处理器”解决方案,主站的实现基于pc机搭载twincat3实现,整体软件架构如图12所示。
72.数据由主站向从站下行发送流程如:上位机利用labwindows/cvi开发人机交互界面,实现对数据的显示监控以及指令的输入,通过ads协议与pc机搭载的主站进行数据交互。xml配置文件利用xmlspy进行开发,主站会将配置文件读取并写入从站的eeprom,完成对从站控制器配置信息的掉电存储。主站将打包好的ethercat数据帧发送给ax58100芯片,由芯片的硬件完成对数据帧的物理层、数据链路层处理后可以得到需要与本从站交互的数据,ax58100将数据经过内部处理后通过pdi过程数据接口经过fsmc总线传输给stm32f429,
stm32通过sdo、pdo映射接收数据后会对数据进行应用层处理,通过dma传输给外设通道(例如dac通道),最后再通过stm32本身的外设驱动与外部器件电路进行信息交互。数据由从站采集发回主站的流程与上述过程相反但同理。
73.从站软件系统的主要工作为在stm32微处理器上开发ethercat从站协议栈,包括coe协议对象字典的建立、状态机处理、应用层数据交换接口以及adc信号采集、dac信号输出、dma数据传输等数据处理。
74.3、ethercat系统从站软件设计
75.(1)从站软件总体方案
76.从站软件主要有两部分功能:一是ethercat网络接口程序,负责对esc芯片的pdi过程数据进行传输互通,完成coe协议数据字典的建立、状态机处理以及pdo和sdo数据的处理;二是外设信号交互程序,完成stm32f429底层外设驱动以及信号的采集、处理以及输出。ethercat系统从站软件框架如图13所示。
77.(2)从站协议栈软件设计
78.从站协议栈驱动程序的入口为主函数“main()”,主函数流程图如14所示。其中“hw_init()”函数主要完成stm32f429底层外设的初始化以及时钟和中断的初始化,“maininit()”函数完成esc寄存器和通信变量的初始化,“mainloop()”函数完成从站数据的循环处理。
79.(3)数据采集软件设计
80.stm32f429进行数据采集传输有查询方式、中断方式和dma方式三种。其中查询方式由cpu连续读数据寄存器进行采集,不仅cpu利用率低,而且传输速度慢;中断方式则是利用中断来提示cpu进行读取,提高了cpu利用率但传输速度低;dma则是完全依靠硬件电路进行数据传输,与cpu无关,大大提高了数据采集和传输速率。故为了保证ethercat系统的高动态性能,本实施例中采用dma的数据采集和传输方式。
81.数据采集传输程序流程图如15所示。程序首先确定adc和dma模块的采样频率、通道、分配存储空间等参数,对其进行初始化配置;后使用adc和dma模块,系统开始采集模拟量数据;adc模块对数据进行ad转换后,由dma通道将数据传输并存储在分配好的存储空间变量中,最后通过pdi数据接口写入esc的数据存储区。
82.(4)模糊自适应pid控制器软件设计
83.针对电液伺服控制系统设计的模糊自适应pid控制器,在stm32f429平台上设计对应软件。由stm32f429读取外部闭环位置返回信号,计算其与给定位置信号的差值,并求出差值变化率。将差值和差值变化率利用高斯函数模糊化,并按照规则库既定规则进行模糊推理求出δk
p
、δki、δkd,进而求出当前的k
p
、ki、kd三个参数,最后进行pid运算并输出控制量,具体程序流程如16图所示。
84.(5)试验测试
85.测试主要以液压站系统中的液压缸位移为控制目标,分别驱动液压缸跟踪正弦波和方波位移信号。整个系统工作流程为:上位机操作人员规划出液压缸所需运动波形轨迹,通过twincat3主站发送给ethercat从站板卡,经过输出数据处理后发送给液压站系统。液压站系统根据上位机发出的既定波形进行动作,缸体位移信号由lvdt传感器采集并传回,缸体速度信号由速度传感器采集并传回。信号采集控制箱对各类信号进行采集并通过
ethercat从站进行模糊pid算法处理,构成双闭环控制系统。
86.同时,液压缸位移信号也会经过ethercat从站系统上传至主站,再通过ads协议传送给上位机监控软件。上位机监控软件对位移信号进行记录,数据记录间隔为5ms。
87.①
设给定波形为正弦波,波形幅值也即液压缸位移范围0~99mm,频率1hz,液压缸跟踪波形如图17所示。
88.②
设给定波形为正弦波,波形幅值也即液压缸位移范围0~25mm,频率2hz,液压缸跟踪波形如18所示。
89.③
对正弦波进行不同频率和幅值的波形组合,以组合波形输出再次进行系统响应测试。前十个周期波形幅值也即液压缸位移范围设置为0~4mm,频率4hz;接下来十个周期波形幅值也即液压缸位移范围设置为0~25mm,频率2hz;最后两个周期波形幅值也即液压缸位移范围设置为0~99mm,频率1hz;液压缸跟踪波形如图19所示。
90.④
设给定波形为方波,波形幅值也即液压缸位移范围0~50mm,频率1hz,液压缸跟踪波形如图20所示。
91.由试验波形图可以看出,系统跟踪正弦波位移整体效果较好,实际值与理论值重合度较高。实际位移波形曲线平滑,超调量较小。
92.最后说明的是,以上实施例仅用以说明本发明的技术方案而非限制,尽管参照较佳实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,可以对本发明的技术方案进行修改或者等同替换,而不脱离本发明技术方案的宗旨和范围,其均应涵盖在本发明的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1