基于最小代价最大流量算法的无人机编队重构方法和系统
本发明属于无人机编队控制,尤其涉及一种基于最小代价最大流量算法的无人机编队重构方法和系统。
背景技术:
1、随着无人机协同技术的不断发展,无人机集群在战场中展现出强大的任务执行能力。携带不同载荷的无人机通过协作,进行载荷互补和任务协调,构成察、打、扰一体化的多功能无人机集群,实现了系统层面的能力提升。无人机集群在诸如侦察、监视、应急通信以及作战等各个领域都发挥了良好的战术效果。
2、战场环境中的任务具有高度对抗性、高度不确定性、高度动态性等特点。面对敌方防空机制的压力,无人机集群在协同生存方面急需相应机制。而在高对抗性的背景下,保证无人机编队的任务能力完整是实现目标任务的前提。保持无人机队形完整是集群要考虑的一个重要问题。执行任务的无人机小队如果受到干扰或摧毁,所剩余无人机数量无法完成目标任务,地面站会指挥剩余的无人机集群待命或返回地面站。受打击无人机集群任务效率也大幅降低。因此,战场中进行及时的无人机重构对于及时完成作战任务具有重要意义。
3、然而,受损的无人机通过重构与其余无人机形成新的集群继续完成作战任务的场景,国内外研究都鲜有提到。因此,针对无人机集群作战的多集群场景,考虑不同任务集群间编队队形、通信拓扑、剩余能量等参数,对战场中损坏残缺的无人机集群进行重组分配,以解决在大型作战场景中,无人机编队因为过多节点受损导致集群基本完整性遭到破坏,无人机集群关键节点损毁,缺少任务关键载荷而无法完成任务的问题。
技术实现思路
1、本发明针对现有技术中的不足,提供一种基于最小代价最大流量算法的无人机编队重构方法和系统。
2、第一方面,本发明提供一种基于最小代价最大流量算法的无人机编队重构方法,包括:
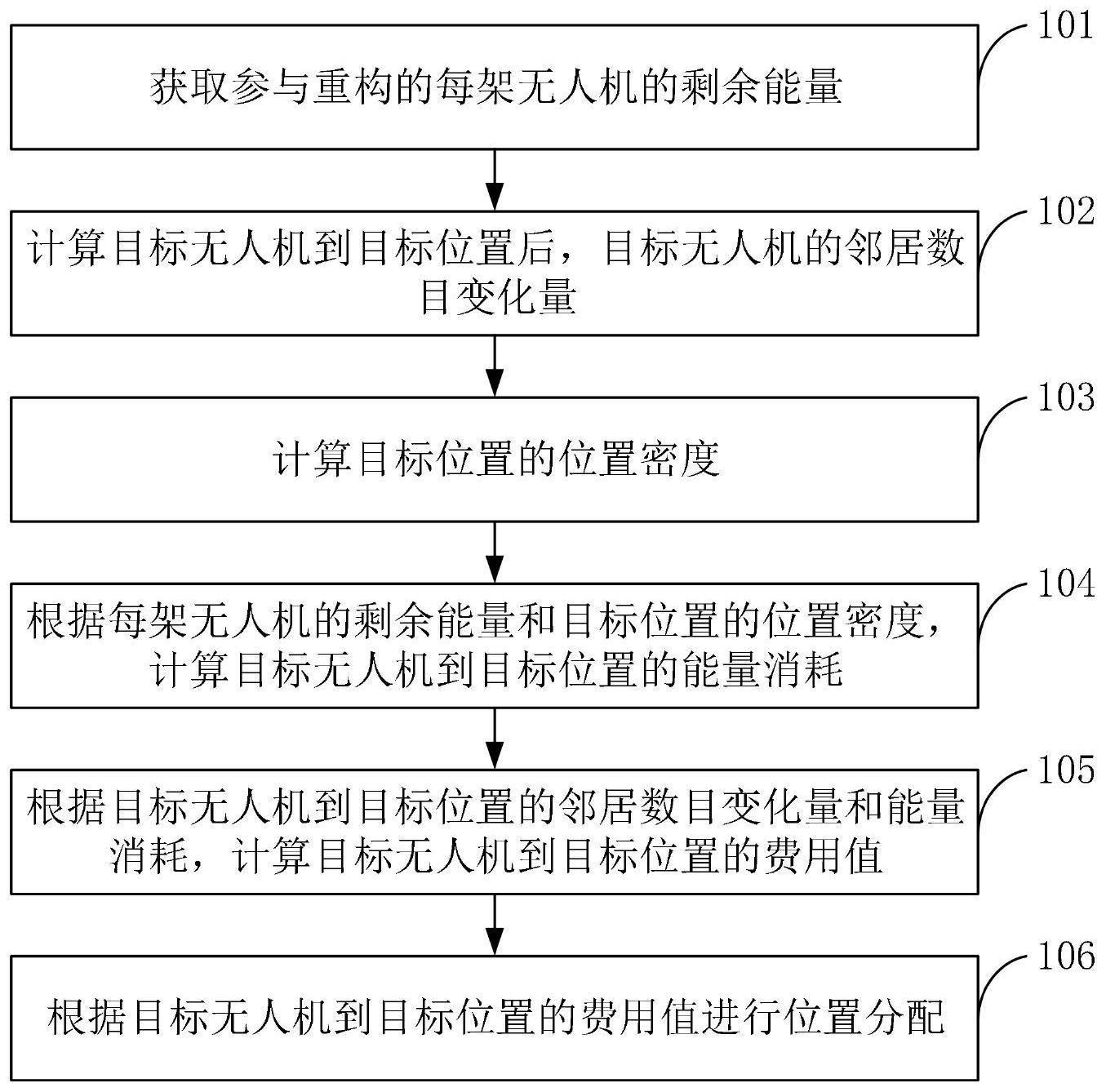
3、获取参与重构的每架无人机的剩余能量;
4、计算目标无人机到目标位置后,目标无人机的邻居数目变化量;
5、计算目标位置的位置密度;
6、根据每架无人机的剩余能量和目标位置的位置密度,计算目标无人机到目标位置的能量消耗;
7、根据目标无人机到目标位置的邻居数目变化量和能量消耗,计算目标无人机到目标位置的费用值;
8、根据目标无人机到目标位置的费用值进行位置分配。
9、进一步地,所述计算目标无人机到目标位置后,目标无人机的邻居数目变化量,包括:
10、根据以下公式计算目标无人机的邻居数目变化量:
11、
12、其中,sij为无人机i到位置j后,无人机i的邻居数目变化量;ni为无人机i的邻居集合;nj为位置j的邻居集合;η为拓扑变化因子,用于判断邻居数目变化量大小。
13、进一步地,所述计算目标位置的位置密度,包括:
14、根据以下公式计算目标位置的位置密度:
15、
16、其中,densj为位置j的位置密度;α为位置密度系数;nj={k|||lki||≤rcommk≠i};rcomn为无人机之间的最大通信距离;lki为无人机i与无人机k之间的欧式距离;n为位置j无人机的数量。
17、进一步地,所述根据每架无人机的剩余能量和目标位置的位置密度,计算目标无人机到目标位置的能量消耗,包括:
18、根据以下公式计算目标无人机到目标位置的能量消耗:
19、pij=densj*(k1pathcostij-k2energyfactori);
20、其中,pij为无人机i到位置j的能量消耗;pathcostij为无人机i到位置j所估计的路径消耗值;k1为pathcostij的影响因子;energyfactori为无人机i的剩余能量值;k2为energyfactori的影响因子。
21、进一步地,所述根据目标无人机到目标位置的邻居数目变化量和能量消耗,计算目标无人机到目标位置的费用值,包括:
22、根据以下公式计算目标无人机到目标位置的费用值:
23、cij=ω1pij+ω2sij;
24、其中,cij为无人机i到位置j的费用值;ω1为pij的影响因子;ω2为sij的影响因子。
25、进一步地,所述根据目标无人机到目标位置的费用值进行位置分配,包括:
26、构建费用矩阵cm×n,其中m为初始无人机的数量;
27、在费用矩阵中不同行不同列选择m个的cij值,使得目标分配的总和最小,即:
28、
29、其中,χ∈(0,1)m×n,为包含xij的变量集;xij的取值表明无人机i与目标位置j之间是否存在分配关系;在分配过程中,包括以下约束关系:
30、
31、采用最小代价最大流算法实现目标分配总和最小:
32、
33、根据无人机初始位置与目标位置数构建二部图g=(v,e);v为二部图的顶点集;e为边集;vi为二部图中的第i个节点;在二部图中添加源点vs与汇点vt,并在源点vs与初始位置集合s、目标位置集合d与汇点vt间建立边(vs,s)与(d,vt);ωij为二部图中由初始位置集合指向目标位置集合的代价值;fij为构建的二部图中对应边上的流值;令边(vs,s),(d,vt),(s,d)上的流量值fij均为1;无人机i到目标位置j的cij设为对应(s,d)边上的费用值ωij,以此构建最大流图中基于代价最小进行目标分配。
34、第二方面,本发明提供一种基于最小代价最大流量算法的无人机编队重构系统,包括:
35、获取模块,用于获取参与重构的每架无人机的剩余能量;
36、第一计算模块,用于计算目标无人机到目标位置后,目标无人机的邻居数目变化量;
37、第二计算模块,用于计算目标位置的位置密度;
38、第三计算模块,用于根据每架无人机的剩余能量和目标位置的位置密度,计算目标无人机到目标位置的能量消耗;
39、第四计算模块,用于根据目标无人机到目标位置的邻居数目变化量和能量消耗,计算目标无人机到目标位置的费用值;
40、位置分配模块,用于根据目标无人机到目标位置的费用值进行位置分配。
41、第三方面,本发明提供一种计算机设备,包括处理器和存储器;其中,处理器执行存储器中保存的计算机程序时实现第一方面所述的基于最小代价最大流量算法的无人机编队重构方法的步骤。
42、第四方面,本发明提供一种计算机可读存储介质,用于存储计算机程序;计算机程序被处理器执行时实现第一方面所述的基于最小代价最大流量算法的无人机编队重构方法的步骤。
43、本发明提供一种基于最小代价最大流量算法的无人机编队重构方法和系统,其中方法包括获取参与重构的每架无人机的剩余能量;计算目标无人机到目标位置后,目标无人机的邻居数目变化量;计算目标位置的位置密度;根据每架无人机的剩余能量和目标位置的位置密度,计算目标无人机到目标位置的能量消耗;根据目标无人机到目标位置的邻居数目变化量和能量消耗,计算目标无人机到目标位置的费用值;根据目标无人机到目标位置的费用值进行位置分配。
44、本发明采用上述方案,无人机集群编队受损散乱时,剩余的集群成员可以通过与其他无人机集群重组成为一个新集群的方式继续完成任务。在设计多无人机集群重建时,考虑到无人机集群间存在着不同的剩余能量以及拓扑结构,将剩余能量以及无人机间拓扑关系作为价值函数以最小成本约束,通过最大流最小代价算法进行新旧位置的分配。无人机集群在形成新编队时,旧无人机飞往新编队满足剩余能量总和以及集群拓扑变化最小。
- 还没有人留言评论。精彩留言会获得点赞!