一种无人机飞控主板的制作方法
1.本实用新型涉及无人机技术领域,具体涉及一种无人机飞控主板。
背景技术:
2.随着无人机技术的快速发展和人们对无人机功能的需求提高,无人机设备正大量用于测绘领域。同时人们对于无人的续航、信号接收、飞行稳定性、避障等问题有了更高的需求。目前,无人机的小型化要求更高,结构更加紧凑,这就需要研究如何在保证无人机各个功能齐全的情况下,将无人机飞控主板的集成化、一体化、精密度做得更高。
3.无人机飞控主板,因其需要具备的功能比较多,所涉及到的硬件模块、传感器也比较多,故该主板上对外的接口比较多,并且各个外置模块、传感器因为出线顺序的原因,也直接影响飞控主板上各个插座的摆放;同时插座接口也受和主板通讯链路的影响,相当于插座接口的摆放是受对外线束和对内信号线的双重影响的,这就对无人机飞控主板插座器件的摆放有了更高的要求。在现有的各个功能的基础上,如何设计能够减小各个外置模块、传感器之间的干涉以及减小主板信号影响的接口布局方案,是值得研究的课题。
技术实现要素:
4.本实用新型针对现有技术中存在的技术问题,提供一种无人机飞控主板,其对无人机飞行控制主板结构进行优化设计,在既保证各个基本功能完善的同时,做到集成化高、体积小、安全可靠性高。
5.本实用新型解决上述技术问题的技术方案如下:
6.一种无人机飞控主板,包括分别设置在主板两面的top层与bottom层,所述主板包括电源管理电路与控制电路,所述电源管理电路与控制电路沿主板的长向依次排布;
7.所述电源管理电路包括电池接口、独立供电接口、电调接口和dc/dc转换单元,所述电池接口、电调接口和dc/dc转换单元沿所述主板的长向依次排布,且电池接口相邻主板的边沿设置、dc/dc转换单元相邻控制电路设置,独立供电接口相邻电池接口设置;所述独立供电接口用于连接外部电源,所述电池接口用于连接电池,所述电调接口用于连接无人机的旋翼电机,所述dc/dc转换单元连接所述控制电路、用于将外部电源或电池电压进行转换后为控制电路供电;
8.所述主板上设有imu模块安装位,所述控制电路包括环绕imu模块安装位的周向设置的主控单元、usb模块、电台通讯接口、载荷接口、pd200定向定位模块接口、gnss模块、气压计、imu接口、磁罗盘接口和雷达接口,所述usb模块、电台通讯接口、载荷接口、pd200定向定位模块接口、gnss模块、气压计、imu接口、磁罗盘接口和雷达接口分别与主控单元通信连接,主控单元还通过相邻电源管理电路设置的第一can总线收发器与所述电池接口通信连接。
9.在上述技术方案的基础上,本实用新型还可以做如下改进。
10.优选的,所述电调接口的周围设有净空区。
11.优选的,所述主控单元相邻主板的一侧边沿设置,所述pd200定向定位模块接口和gnss模块设置在主板上与主控单元相远离的一侧、且与主板的边沿相邻设置;相邻所述pd200定向定位模块接口还设有第二can总线收发器,所述pd200定向定位模块接口通过第二can总线收发器与主控单元通信连接。
12.优选的,还设有相邻所述pd200定向定位模块接口的pd200天线座和射频功分器,所述pd200天线座通过射频功分器与所述pd200定向定位模块接口通信连接;所述射频功分器外设有射频功分器屏蔽罩。
13.优选的,相邻所述射频功分器还设有gnss天线座和载荷天线座,gnss天线座和载荷天线座分别与射频功分器连接,所述gnss天线座用于安装gnss天线,所述载荷天线座用于连接无人机挂载的载荷天线。
14.优选的,所述控制电路还包括相邻主板边沿设置的软件烧录接口和软件调试接口,所述软件烧录接口和所述软件调试接口分别与主控单元通信连接。
15.优选的,所述主控单元包括设置在bottom层上的mcu、fmu和emmc,所述mcu、fmu和emmc沿主板的长向依次排布,所述mcu、fmu和emmc外对应设有第一信号屏蔽罩;所述主控单元还包括设置在top层上的主控电源电路,所述主控电源电路外对应设有第二信号屏蔽罩。
16.优选的,所述主板上相邻电台通讯接口和载荷接口的位置设有线束过孔,所述电台通讯接口和载荷接口设置在top层上,所述电台通讯接口和载荷接口的线束贯穿所述线束过孔、与主控单元通信连接。
17.优选的,所述usb模块包括usb接口、rtk usb口和usb hub单元,所述usb接口和rtk usb口均与usb hub单元通信连接,所述usb hub单元与主控单元通信连接;所述usb接口、rtk usb口相邻所述主控单元、且沿主板边沿依次设置。
18.优选的,所述控制电路还包括飞控状态指示灯接口,所述飞控状态指示灯接口相邻所述电池接口设置、并与所述主控单元通信连接,所述飞控状态指示灯接口用于安装飞控状态指示灯。
19.本实用新型的有益效果是:本实用新型提供的无人机飞控主板对无人机飞行控制主板结构、尤其是各功能模块的布局进行优化设计,在既保证各个基本功能完善的同时,做到集成化高、体积小、安全可靠性高。通过将电池接口(供电端)、电调接口(即负载端)和dc/dc转换单元(即为控制电路供电的小电流输出端)呈线性依次排布,使得供电线路为线形排布,一是使得供电端与负载端路径最短,减少供电线路中大电流发热对飞控主板控制部分电路的干扰;二是保证了较短的供电路径,同时避免形成供电电流环路,防止形成环路电流产生热量对主板的信号质量产生较大影响,提升了主板的安全可靠性。通过将各个功能模块围绕主控单元设置、且射频信号相关的功能模块远离主控单元,使主控单元与各个功能模块的信号链路呈发散状,缩短了信号链路长度,减少了信号受外部干扰的影响,也利于提升无人机主板集成化、减小无人机体积;射频信号相关功能模块远离主控单元,减小其余信号链路的信号对射频信号之间的干扰,进一步提升了主板运行的可靠性。
附图说明
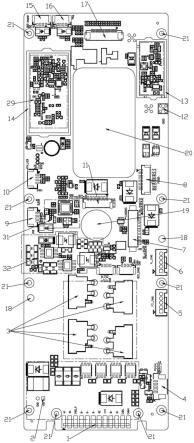
20.图1为本实用新型提供的一种无人机飞控主板的top层布局设计图;
21.图2为本实用新型提供的一种无人机飞控主板的bottom层布局设计图;
22.图3为本实用新型提供的一种无人机飞控主板的top层视角立体结构示意图;
23.图4为本实用新型提供的一种无人机飞控主板的bottom层视角立体结构示意图;
24.图5为本实用新型提供的一种无人机飞控主板的top层实物结构图;
25.图6为本实用新型提供的一种无人机飞控主板的bottom层实物结构图;
26.图7为本实用新型提供的一种无人机飞控主板的信号链路示意图。
27.附图中,各标号所代表的部件列表如下:
28.1、电池接口,2、独立供电接口,3、电调接口,4、飞控状态指示灯接口,5、软件烧录接口,6、软件调试接口,7、载荷接口,8、pd200定向定位模块接口,9、usb接口,10、rtk usb口,11、电台通讯接口,12、gnss天线座,13、射频功分器屏蔽罩,14、第一信号屏蔽罩,15、雷达接口,16、磁罗盘接口,17、imu接口,18、固定线束过孔,19、线束过孔,20、imu模块安装位,21、螺钉安装孔,22、第二信号屏蔽罩,23、pd200天线座,24、载荷天线座,25、气压计屏蔽罩,2501、气压计,26、第一can总线收发器,27、第二can总线收发器,28、232收发器,29、主控单元,2901、mcu,2902、fmu,2903、emmc,30、gnss模块,31、usb hub单元,32、dc/dc转换单元。
具体实施方式
29.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
30.请参阅附图,其中:
31.图1为本实用新型提供的一种无人机飞控主板的top层布局设计图;
32.图2为本实用新型提供的一种无人机飞控主板的bottom层布局设计图;
33.图3为本实用新型提供的一种无人机飞控主板的top层视角立体结构示意图;
34.图4为本实用新型提供的一种无人机飞控主板的bottom层视角立体结构示意图;
35.图5为本实用新型提供的一种无人机飞控主板的实物正面视角结构图;
36.图6为本实用新型提供的一种无人机飞控主板的实物背面视角结构图;
37.图7为本实用新型提供的一种无人机飞控主板的信号链路示意图。
38.如图1~7所示,本实施例提供一种无人机飞控主板,其包括分别设置在主板两面的top层与bottom层。关于附图,需要说明的是,图1、图2和图7为电路的元器件布局设计图,这三个图中主板的top层与bottom层的元器件位置完全对应。例如图1中top层的左上角与图2中bottom层的左上角为主板上的同一个位置。具体的,图1和图7中top层的元器件位置与图3的结构图、图5的实物图完全对应,而图2和图7中bottom层的元器件位置与图4的结构图、图6的实物图为镜像关系。
39.所述主板包括电源管理电路与控制电路,所述电源管理电路与控制电路沿主板的长向依次排布。
40.所述电源管理电路包括电池接口1、独立供电接口2、电调接口3和dc/dc转换单元32,所述电池接口1、电调接口3和dc/dc转换单元32沿所述主板的长向依次排布,且电池接口1相邻主板的边沿设置、dc/dc转换单元32相邻控制电路设置,独立供电接口2相邻电池接口1设置;所述独立供电接口2用于连接外部电源,所述电池接口1用于连接电池,所述电调接口3用于连接无人机的旋翼电机,所述dc/dc转换单元32连接所述控制电路、用于将外部电源或电池电压进行转换后为控制电路供电。
41.电池接口1与独立供电接口2均连接电调接口3的输入端、且电池接口1与独立供电接口2均连接dc/dc转换单元32的一次侧。无人机内的电池模块插接在电池接口1上,为无人机飞行过程中供电。独立供电接口2连接外部电源,主要用于无人机调试过程中为无人机供电、以及为电池充电。电调即电子调速器,用于根据控制电路提供的控制信号调节无人机旋翼电机的转速。电调接口3与无人机的旋翼电机相连,为其提供工作电源。dc/dc转换单元32则对电池或独立供电接口2提供的电源电压进行转换,为后级电路提供工作电压。例如,提供转换后的+5v电压和+3.3v电压,以驱动后级的控制电路工作。如图1所示,将电调接口3靠近电池接口1设置,可保证供电端和负载端距离最短,同时这里电流比较大,电调摆放在此处可以减少大电流发热对飞控主板控制部分电路的干扰,提升无人机长期运行的安全可靠性。本实施例中将电池、电调、dc/dc转换单元32从左到右依次排布,使得供电顺序为从左到右依次供电,如此设置使得电源管理电路的供电路径最短,同时避免形成供电电流环路,如果形成环路电流,产生的热量对主板的信号质量也是有很大影响。
42.如图1所示,所述主板上设有imu模块安装位20,所述控制电路包括环绕imu模块安装位20的周向设置的主控单元29、usb模块、电台通讯接口11、载荷接口7、pd200定向定位模块接口8、gnss模块30、气压计2501、imu接口17、磁罗盘接口16和雷达接口15,所述usb模块、电台通讯接口11、载荷接口7、pd200定向定位模块接口8、gnss模块30、气压计2501、imu接口17、磁罗盘接口16和雷达接口15分别与主控单元29通信连接。主控单元29还通过相邻电源管理电路设置的第一can总线收发器26与所述电池接口1通信连接,实现主控单元29与无人机内的电池模块之间的通信,实现对电池模块的管理。
43.主控单元29作为无人机的控制核心部分,与各个功能模块进行通信以及控制各个功能模块的运转。各个功能模块接口中,usb模块用于实现本机与外设的数据交互;电台通讯接口11可接外置的电台,实现本机与地面基站之间的通信;载荷接口7为立插式,用于连接无人机挂载的负载,例如相机或者激光雷达等测绘设备,载荷接口7为负载供电并进行通信;pd200定向定位模块接口8为侧插式,与主板外置的pd200定向定位模块连接,实现外置pd200定向定位模块与主板的通信;如图2所示,此处的gnss模块30为板载的gnss芯片,其为本机提供位置和姿态信息。gnss模块30和外置的pd200定向定位模块相互协作,以pd200定向定位模块为主、gnss模块30为辅,共同为本机提供精准的定位。板载的气压计2501为本机提供气压测量数据。如图1所示,本实施例设置两个气压计2501,在无人机正常运转过程中,一颗气压计2501工作、另一颗气压计2501备用,在气压计2501的外周设有非密封的气压计屏蔽罩25,以防止外部线束或其他功能模块对气压计2501造成结构干涉。安装在imu模块安装位20内的imu模块与imu接口17插接,为本机提供测量的惯性测量数据,例如本机的三轴角速度和加速度数据。磁罗盘接口16为立插式,其与主板外置的磁罗盘模块插接,用于为主板提供测得的方位数据。雷达接口15为立插式,其与主板外置的雷达模块插接,用于为主板提供测得的雷达扫描数据。
44.结合图1、图2、图7所示,将imu模块安装位20设置在主板的中间位置,主控单元29以及各个功能模块的接口环绕imu模块安装位20设置,如图7的top层、bottom层信号线走向图所示,该设置可以使得主控单元29到各个功能模块的信号链路为发散开的状态,板内信号线较短,并且信号线受其他网络信号干扰最小。由于无人机工作过程中,imu模块安装在imu模块安装位20内、与imu接口17插接,由于各个功能模块接口的排序设置,使得处理射频
信号的pd200定向定位模块远离主控单元29(如图1、图5所示的pd200定向定位模块接口8与主控单元29分别位于imu模块安装位20的两侧),从而减小主控单元29发散出的各个信号链路对射频信号的干扰。除了imu接口17,其余各个功能模块的接口环绕imu模块安装位20、且各个接口的插接端远离imu模块安装位20设置,使得各个功能模块连接到对应接口的线束最短、且各个功能模块与各个对应接口之间插拔方便易操作,各个功能模块插拔时不易相互干涉,各个功能模块的信号线受其他网络信号干扰最小。另外,imu接口17的出线端设置为朝向imu模块安装位20,可减短imu模块的线束长度;进一步,imu接口17朝向imu模块安装位20的一端可设置净空区,便于imu模块的线束插拔。
45.需注意的是,无人机的主控单元29与各个功能模块之间的通信原理为本领域现有技术,本实用新型改进的是主板的结构布局,并未改进各个功能模块与主控单元29之间为实现无人机基本功能的通信方式以及控制程序。因此,无人机如何实现其各项基本功能,本实施例中不再赘述。本实施例的无人机飞控主板在保证各个基本功能完善的同时,做到集成化高、体积小、安全可靠性高。
46.在上述技术方案的基础上,本实用新型还可以做如下改进。
47.如图1所示,所述电调接口3的周围设有净空区。
48.可以理解的是,由于本实施例用于进行举例的无人机具有四个旋翼电机,相对应的,如图1所示,所述电调接口3设有四个。四个电调接口3呈阵列分布,且电调接口3周围设有净空区。此处设置净空区的原因是,电调接口3插拔需要相对较大空间,此处的净空区一是可以避免电调插拔时与其他元器件相干涉,二是将电流的大电流与控制电路分隔开,减小电调接口3大电流对控制电路的信号造成干扰。
49.如图1所示,所述主控单元29相邻主板的一侧边沿设置、且远离电源管理电路,所述pd200定向定位模块接口8和gnss模块30设置在主板上与主控单元29相远离的一侧、且与主板的边沿相邻设置;相邻所述pd200定向定位模块接口8还设有第二can总线收发器27,所述pd200定向定位模块接口8通过第二can总线收发器27与主控单元29通信连接。
50.可以理解的是,由于主控单元29发出多条信号链路到各个功能模块,将主控单元29的位置设置在远离pd200定向定位模块接口8和gnss模块30的位置,可减少主控单元29的信号链路对pd200定向定位模块接口8以及gnss模块30的信号干扰。主控单元29设置在主板的边沿,可防止主控单元29处于被各个功能模块包围的状态,减小各个功能模块对主控单元29的信号影响。将主控单元29设置在远离电源管理电路的位置,为了减小电源管理电路产生的热量以及其流过的大电流对主控单元29的信号产生影响。
51.优选的,还设有相邻所述pd200定向定位模块接口8的pd200天线座23和射频功分器,所述pd200天线座23通过射频功分器与所述pd200定向定位模块接口8通信连接;所述射频功分器外设有射频功分器屏蔽罩13。
52.可以理解的是,pd200天线座23用于连接无人机上外置的pd200定向定位模块天线,pd200定向定位模块接口8用于与pd200定向定位模块插接。因为射频天线信号受其他信号干扰的影响比较大,故要对其做信号屏蔽处理,通过在射频功分器外设置射频功分器屏蔽罩13,减少其他信号对射频天线信号的干扰。
53.优选的,相邻所述射频功分器还设有gnss天线座12和载荷天线座24,gnss天线座12和载荷天线座24分别与射频功分器连接,所述gnss天线座12用于安装gnss天线,所述载
荷天线座24用于连接无人机挂载的载荷天线。
54.可以理解的是,将pd200天线座23、gnss天线座12以及载荷天线座24相邻射频功分器设置,一是便于天线的集中管理,二是缩短各个天线到射频功分器之间的信号链路,进一步减小其他信号对天线射频信号的干扰。进一步,为了防止相邻天线座之间的干涉,可将相邻的天线座分设在主板的两面,例如图1所示,pd200天线座23与gnss天线座12在射频功分器的同侧相邻设置,将pd200天线座23设置在主板的bottomtop层,将gnss天线座12设置在主板的top层,二者的焊脚相邻设置、以接收结构安装空间,二者的主体部分分设于主板的两面、互不干涉。
55.优选的,所述控制电路还包括相邻主板边沿设置的软件烧录接口5和软件调试接口6,所述软件烧录接口5与所述软件调试接口6分别与主控单元29通信连接。如图1所示,软件烧录接口5、软件调试接口6作为无人机前期软件烧录以及调试的接口,其可设置在电调接口3的净空区之外的主板边沿,且尽量缩短主控单元29到软件烧录接口5、软件调试接口6之间的信号线长度。
56.优选的,所述主控单元29包括设置在bottom层上的mcu2901、fmu2902和emmc2903,所述mcu2901、fmu2902和emmc2903沿主板的长向依次排布,所述mcu2901、fmu2902和emmc2903外对应设有第一信号屏蔽罩14;所述主控单元29还包括设置在top层上的主控电源电路,所述主控电源电路外对应设有第二信号屏蔽罩22。
57.mcu2901作为主控单元29的i/o控制芯片,实现主控单元29与各个功能模块接口之间的连接;fmu2902作为主控单元29的处理器模块,与mcu2901和emmc2903芯片分别通信连接;emmc2903则作为主控单元29的存储模块,存储无人机的各项数据。主控电源电路将dc/dc转换单元32提供的电压经过滤波处理后,为mcu2901、fmu2902和emmc2903提供工作电源。将mcu2901、fmu2902和emmc2903依次排列,可使得emmc2903与fmu2902之间的通信链路最短。第一信号屏蔽罩14为mcu2901、fmu2902和emmc2903提供信号屏蔽,减少外部信号对mcu2901、fmu2902和emmc2903的干扰;第二信号屏蔽罩22为主控电源电路提供信号屏蔽,例如为主控电源电路中的各个滤波电容提供信号屏蔽,减小外部信号对其的干扰。第一信号屏蔽罩14和第二信号屏蔽罩22在主板的两面、且位置对应设置,可将主控单元29完整包容在内、为主控单元29提供较佳的信号屏蔽效果。
58.优选的,所述主板上相邻电台通讯接口11和载荷接口7的位置设有线束过孔19,所述电台通讯接口11和载荷接口7设置在top层上,所述电台通讯接口11和载荷接口7的线束贯穿所述线束过孔19、与主控单元29通信连接。
59.如图1所示,电台通讯接口11和载荷接口7未与主板的边沿相邻,其设置在主板的top层上,而主控单元29的mcu2901、fmu2902和emmc2903设置在主板的bottom层上。为了实现电台通讯接口11和载荷接口7与主控单元29之间的通信连接,电台通讯接口11和载荷接口7的线束会从top层引到bottom层。为了减短电台通讯接口11和载荷接口7引出的线束,是主板理线更加整洁,以及减小因信号线较长造成的信号干扰,将电台通讯接口11和载荷接口7引出的线束穿过设置在主板中部的线束过孔19,实现通过更短的信号线与主控单元29之间实现通信连接。如图2所示,在主板的bottom层上对应电台通讯接口11或载荷接口7的位置设有232收发器28,用于实现载荷接口7连接的外设与主控单元29之间的通信。
60.如图1所示,所述usb模块包括usb接口9、rtk usb口10和usb hub单元31,所述usb
接口9和rtk usb口10均与usb hub单元31通信连接,所述usb hub单元31与主控单元29通信连接;所述usb接口9、rtk usb口10相邻所述主控单元29、且沿主板边沿依次设置。
61.由于无人机需预留一个usb接口9与外部设备进行数据交互,pd200定向定位模块也需要一个usb口与主控单元29进行数据交互,例如将pd200定向定位模块里面的rtk模式计算数据、日志以及板卡、惯导等模块的原始数据传输进主控单元29进行存储,或将主控单元29内的升级固件拷贝进pd200定向定位模块内部,用以升级。因此,主板上设有usb hub单元31,用于将主控单元29的usb端口进行扩展,使主控单元29可与无人机对外的usb接口9通信,又可与无人机内部的pd200定向定位模块进行数据交互。
62.如图1所示,所述控制电路还包括飞控状态指示灯接口4,所述飞控状态指示灯接口4相邻所述电池接口1设置、并与所述主控单元29通信连接,所述飞控状态指示灯接口4用于安装飞控状态指示灯。飞控状态指示灯接口4采用侧插式,以减小线束应力,保证线束可靠性。如图3~4所示的立体结构图中则展示了飞控状态指示灯安装后的结构。飞控状态指示灯用于指示无人机的运行状态,例如当其旋翼电机开始运转,对应的,飞控状态指示灯亮;当旋翼电机停止运转,则飞控状态指示灯灭,其还可用于在飞机起飞前,确定飞机状态是否正常。
63.因为飞控板对外连接的线束比较多,为了进一步实现对主板引出线束的理线优化,在主板的两条长边各开一个固定线束过孔18,扎带通过固定线束过孔18将这些线束固定,做到主板的理线整齐归一。为了实现主板在无人机内部结构件上的有效固定安装,在主板的边沿设有若干个螺钉安装孔21,螺钉通过螺钉安装孔21、将主板压接固定在无人机的壳体内部。
64.本实用新型提供的无人机飞控主板对无人机飞行控制主板结构、尤其是各功能模块的布局进行优化设计,在既保证各个基本功能完善的同时,做到集成化高、体积小、安全可靠性高。通过将电池接口1(供电端)、电调接口3(即负载端)和dc/dc转换单元32(即为控制电路供电的小电流输出端)呈线性依次排布,使得供电线路为线形排布,一是使得供电端与负载端路径最短,减少供电线路中大电流发热对飞控主板控制部分电路的干扰;二是保证了较短的供电路径,同时避免形成供电电流环路,防止形成环路电流产生热量对主板的信号质量产生较大影响,提升了主板的安全可靠性。通过将各个功能模块围绕主控单元29设置、且射频信号相关的功能模块远离主控单元29,使主控单元29与各个功能模块的信号链路呈发散状,缩短了信号链路长度,减少了信号受外部干扰的影响,也利于提升无人机主板集成化、减小无人机体积;射频信号相关功能模块远离主控单元29,减小其余信号链路的信号对射频信号之间的干扰,进一步提升了主板运行的可靠性。
65.通过本实用新型的元器件布局方式,可以做到板外线束接口好插拔、线束距离最短的同时,还可以保证板内信号线最短,并且信号线受其他网络信号干扰最小,如图7为飞控主板top层和bottom层的信号线走向,可以看到信号线是从处理器芯片的位置,向四周各个模块、接口发散开的,没有出线部分信号线长距离走线,保证了信号质量达到预期的效果。
66.相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
67.需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等
指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该技术产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本技术和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术的限制。此外,“第一”、“第二”仅用于描述目的,且不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。因此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。因此术语“第一”、“第二”、“第三”等仅用于区分描述,而不能理解为指示或暗示相对重要性。本实用新型的描述中,除非另有说明,“多个”的含义是两个或两个以上。
68.此外,术语“水平”、“竖直”、“悬垂”等术语并不表示要求部件绝对水平或悬垂,而是可以稍微倾斜。如“水平”仅仅是指其方向相对“竖直”而言更加水平,并不是表示该结构一定要完全水平,而是可以稍微倾斜。
69.在本技术的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体的连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本技术中的具体含义。
70.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1