一种电气自动化控制系统的制作方法
1.本实用新型涉及电气自动化技术领域,具体为一种电气自动化控制系统。
背景技术:
2.电气自动化是指在无人或人少参与的情况下,使产品的操作、控制和监视,能够按照提前设定好的计划或程序自动地运行。电气自动化是指能够实现机械自动化,让机械部分脱离人类的直接控制和操作,自动实现某些过程。
3.现有技术中,一是通信电缆芯数多,通常通信信号越复杂,通信电缆线芯数越多,直径越大,重量越大,不满足经济性和适用性,而本方案采用电力通讯模组,不管信号多复杂,只需两芯线就能完成通讯,很好地解决了上述通信线缆问题。二是传统控制技术采用单一的通讯协议,比如rs485通讯协议,can总线协议等,需要特定的设备与之通讯,如需上传网络还需要配备网络模块,为此我们提出一种电气自动化控制系统用于解决上述问题。
技术实现要素:
4.本实用新型的目的在于提供一种电气自动化控制系统,以解决上述背景技术中提出的问题。
5.为实现上述目的,本实用新型提供如下技术方案:一种电气自动化控制系统,包括包括开关电源、控制单元和设备单元,所述设备单元包括plc、数模转换器、模数转换器、网络通信模块、接触器模块、电磁阀、压力传感器、液位传感器和温度传感器,所述压力传感器、液位传感器和温度传感器分别与模数转换器电性连接,所述plc电连接模数转换器和数模转换器,所述数模转换器电性连接比例电磁阀,所述模数转换器分别与压力传感器、液位传感器和温度传感器电性连接,所述plc电性连接交换机,所述交换机电性连接摄像头和控制单元,其中;
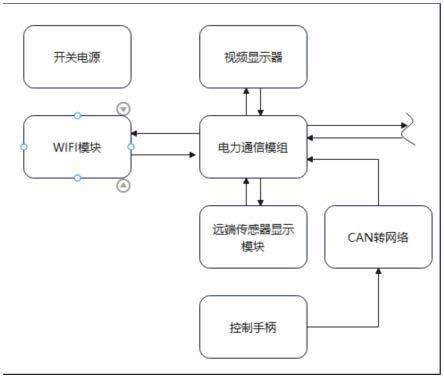
6.所述控制单元包括电力通信模组,所述电力通信模组电性连接视频显示器、远端传感器显示模块、wifi模块和can转网络,所述can转网络电性连接控制手柄用于将报文传送给can转网络模块。
7.优选的,所述plc电性连接接触器模块,所述接触器模块电性连接水泵马达、搅拌马达、油缸电机和油冷电机。
8.优选的,所述控制手柄用于控制水泵马达继电器、搅拌马达继电器、油泵电机继电器、油冷电机继电器、油缸继电器。
9.优选的,所述控制手柄与can转网络模块支持协议包括ethernet、arp、ip、icmp、udp、dhcp、tcp用于将控制手柄的报文传送至互联的网络设备。
10.优选的,所述电力通信模组的电力线传输速率为200mbps,所述电力通信模组支持ieee802.3、ieee802.3u、标准、支持plc滤波和过流及防雷保护以及10/100mbp自适应以太网接口。
11.优选的,所述视频显示与远端传感器显示模块用于实时显示远端设备工作状态、
压力传感器的变化。
12.优选的,所述开关电源电性连接设备单元和控制单元用于给设备单元和控制单元提供电源,所述开关电源供电电源主要分为24v、12v、5v、3.3v。
13.优选的,所述电力通信模组与控制端电力通信模组用于进行数据通讯,所述交换机用于将摄像头、plc模组的通讯数据集成到电力通信模组。
14.优选的,所述plc模组电性连接rs485接口用于接收压力、温度、液位传感器的信号,所述plc模组用于分析控制手柄的报文和发出控制动作。
15.与现有技术相比,本实用新型的有益效果是:
16.1.本方案将rs485通讯协议,can总线协议集成封装并转为tcp/ip协议,不仅控制端可以观察设备运行情况,所有联网终端都可以观察设备运行情况。
17.2.使得能够对具有多个液压缸的液压机进行控制,从而使其能够根据预设的输出压力进行工作;此外,通过视频模块能够进行远程监控,从而便于使用者实时对液压机及工作面状态进行观察。
附图说明
18.图1为本实用新型中控制单元系统模块结构示意图;
19.图2为本实用新型中设备单元系统模块结构示意图;
20.图3为本实用新型电路图。
21.图中:1、底座;2、固定座;3、旋转体;4、转动装置;41、丝杆;42滑动座;43、油箱;44、活塞;45、活塞杆;46、转动头;5、支撑装置;51、支撑座;52、伸缩杆;53、固定板、54、限位杆;55挤压块。
具体实施方式
22.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
23.请参阅图1-3,一种电气自动化控制系统,包括包括开关电源、控制单元和设备单元,设备单元包括plc、数模转换器、模数转换器、网络通信模块、接触器模块、电磁阀、压力传感器、液位传感器和温度传感器,压力传感器、液位传感器和温度传感器分别与模数转换器电性连接,plc电连接模数转换器和数模转换器,数模转换器电性连接比例电磁阀,模数转换器分别与压力传感器、液位传感器和温度传感器电性连接,plc电性连接交换机,交换机电性连接摄像头和控制单元,其中;
24.控制单元包括电力通信模组,电力通信模组电性连接视频显示器、远端传感器显示模块、wifi模块和can转网络,can转网络电性连接控制手柄用于将报文传送给can转网络模块,由can转网络模块将canopen标准通讯协议转为tcp/ip协议,控制手柄与can转网络模块支持协议包括ethernet、arp、ip、icmp、udp、dhcp、tcp;10m/100m自适应以太网接口,2kv电磁隔离,静电防护,浪涌防护;具有优良的emc性能,符合can 2.0b规范,兼容can2.0a,采用精致、高性能、高稳定性的can与网络转换模块,它具有1路can和1路以太网接口,can的波
特率支持10kbps~1000kbps,用于将控制手柄的报文传送至互联的网络设备,电力通信模组的电力线传输速率为200mbps,工作稳定,性能可靠,电力通信模组支持ieee802.3、ieee802.3u、标准、支持plc滤波和过流及防雷保护以及10/100mbp自适应以太网接口,最远可达300m传输距离,解决了网线传输距离短的缺,一般的网络数据传输线为8芯线材,采用电力通信模组后,数据传输线为2芯线材,极大的节约了线材的使用。
25.控制手柄采用canopen标准通讯协议,默认can速率250kb/s,报文长度位固定8字节。即byte1-byte2-byte3-byte4-byte5-byte6-byte7-byte8,一个byte又包含8比特(bit),即bit1-bit2-bit3-bit4-bit5-bit6-bit7-bit8,若手柄无动作,则十六进制格式报文为:0x01 0x00 0x01 0x00 0x00 0x00 0x00 0x00,手柄沿x轴左右移动,byte1-byte2数据范围为0x04fa~0x10fa,手柄沿y轴上下移动,byte3-byte4数据范围为0x04fa~0x10fa,其余byte5-byte6-byte7-byte8定义为开关量,控制手柄用于控制水泵马达继电器、搅拌马达继电器、油泵电机继电器、油冷电机继电器、油缸继电器。
26.电力通信模组与控制端电力通信模组用于进行数据通讯,交换机用于将摄像头、plc模组的通讯数据集成到电力通信模组,plc电性连接接触器模块,接触器模块电性连接水泵马达、搅拌马达、油缸电机和油冷电机,plc模组型号为simatic s7-200 smart st 30,模数转换器为emaq04,plc模组电性连接rs485接口用于接收压力、温度、液位传感器的信号,plc模组用于分析控制手柄的报文和发出控制动作,发出控制动作分为两部分:1是控制手柄报文的开关量控制;2是控制手柄报文的x轴、y轴偏移量;通过rs485接口接收压力、温度、液位传感器的信号,plc经分析后传至控制端传感器显示模块,显示实时数据变化;数模转换器:数字信号转模拟信号,也称d/a转换器,数模转换器型号为emaq04连接比例电磁阀;模数转换器:模拟信号转数字信号,也称a/d转换器,模数转换器集成在其他普通电磁阀上。
27.开关电源电性连接设备单元和控制单元用于给设备单元和控制单元提供电源,开关电源供电电源主要分为24v、12v、5v、3.3v。
28.wifi模块提供无线信号,使用者可以在控制端观察及控制远端设备,也可在智能手机可以实时的观察远端设备的工作状态,为使用者提供了便利,视频显示与远端传感器显示模块用于实时显示远端设备工作状态、压力传感器的变化。
29.数模转换器电连接行走马达1和行走马达2,行走马达1和行走马达2分别电连接比例电磁阀1和比例电磁阀2,比例电磁阀1和比例电磁阀2油路进出口分别连接行走液压马达1和行走液压马达2;
30.plc模组油缸电机动机线连接接触器,接触器线连接开关,开关一端线连接油缸电机,开关另一端线连接电源ac200v和n级;
31.plc模组制冷风机线连接继电器5,继电器5线连接油冷风机,油冷风机一端线连接n级;
32.plc模组油缸下降线连接继电器4,继电器4线连接24v电源,24v电源正负极分别连接电磁阀4、电磁阀3、电磁阀2和电磁阀1;电磁阀4油路进出口连接油缸2,电磁阀3油路进出口连接油缸1,电磁阀2油路进出口连接液压马达2,电磁阀1油路进出口连接液压马达1;
33.plc模组油缸上升线连接继电器3,plc模组搅拌马达线连接继电器2,plc模组水泵马达线连接继电器1,继电器1、继电器2、继电器3均连接24v电源;
34.plc模组线连接dc24正负极,plc模组网口线连接交换机,交换机线连接电力载波
通信模组网口,plc模组rs485线连接压力、温度、液位传感器。
35.一:电力通信模组
36.与控制端电力通信模组配套使用,完成数据通讯;
37.二:交换机
38.将摄像头、plc的通讯数据集成到电力通信模组,由设备端电力通信模组与控制端电力通信模组完成数据通讯;
39.三:plc
40.plc作为控制端的核心,负责分析控制手柄的报文,发出控制动作分为两部分:1是控制手柄报文的开关量控制;2是控制手柄报文的x轴、y轴偏移量;通过rs485接口接收压力、温度、液位传感器的信号,plc经分析后传至控制端传感器显示模块,显示实时数据变化
41.表1:接受报文
[0042][0043]
表1
[0044]
表2:分析报文
[0045][0046]
表2
[0047]
四:数模转换器(emaq04)
[0048]
经plc分析控制手柄报文后,控制手柄x轴、y轴偏移量为数据量,经emaq04转换为模拟量0~20ma,继而控制比例电磁阀,由比例电磁阀的开关比例控制行走液压马达,完成整机的前进、后退、左转向、及右转向
[0049]
表3:手柄x轴、y轴偏移量
[0050][0051]
表3
[0052]
表4:模拟量0~20ma输出
[0053]
[0054]
表4
[0055]
四:接触器组(继电器)
[0056]
经plc分析控制手柄报文后,控制手柄开关量由plc输出端输出控制信号,经接触器控制电磁阀,由电磁阀的开关控制水泵液压马达、搅拌液压马达、油缸、油冷电机、油缸电机完成整机的工作
[0057]
表5:继电器控制
[0058][0059]
表5
[0060]
使得能够对具有多个液压缸的液压机(液压马达)进行控制,从而使其能够根据预设的输出压力进行工作;此外,通过视频模块能够进行远程监控,从而便于使用者实时对液压机及工作面状态进行观察,将rs485通讯协议,can总线协议集成封装并转为tcp/ip协议,不仅控制端可以观察设备运行情况,所有联网终端(比如手机、平板等设备)都可以观察设备运行情况。
[0061]
尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1