一种用于水面移动平台的自动避障系统
本技术涉及移动平台自动避障,特别是涉及一种用于水面移动平台的自动避障系统。
背景技术:
1、目前在地面上及空中的视觉识别技术对周边障碍物进行识别的避障技术发展较快,但需要基于复杂的视觉识别算法,成本较高且其可靠性和成熟度都还有待进一步提升。地面上采用多线程激光雷达扫描成像识别技术的自动巡航避障技术相对比较成熟,现有设备中如使用多线程扫描成像激光雷达虽然可以较好的获取监测方向区域的外部信息,但也会较大幅度提高产品成本价格,同时由于多线扫描激光雷达体积远大于单点激光探头,在小型移动平台(长度小于1米)上基本无法安置和使用;水面上大中型以上的移动载体则多采用雷达探测技术主动规避水面大中型障碍物(包括岛礁和其它船舶等),但在水面上,由于波浪起伏对小型水面移动载体影响较大,并且载体平台体积过小无法装载大中型避障设备,因此上述小型水面移动载体基本无法使用以上常规的避障技术。因此亟需一种用于水面移动平台的自动避障系统,可克服水面波浪起伏对小型移动平台影响,减少和避免因平台随水波浪起伏而引起的移动平台自动避障预警动作的误报和误操作,同时可有效控制设备成本及体积。
技术实现思路
1、本实用新型要解决的技术问题是提供一种用于水面移动平台的自动避障系统,其解决了现有水面移动载体中自动避障系统易受水面起伏影响且设备体积大的问题,从而克服现有技术的不足。
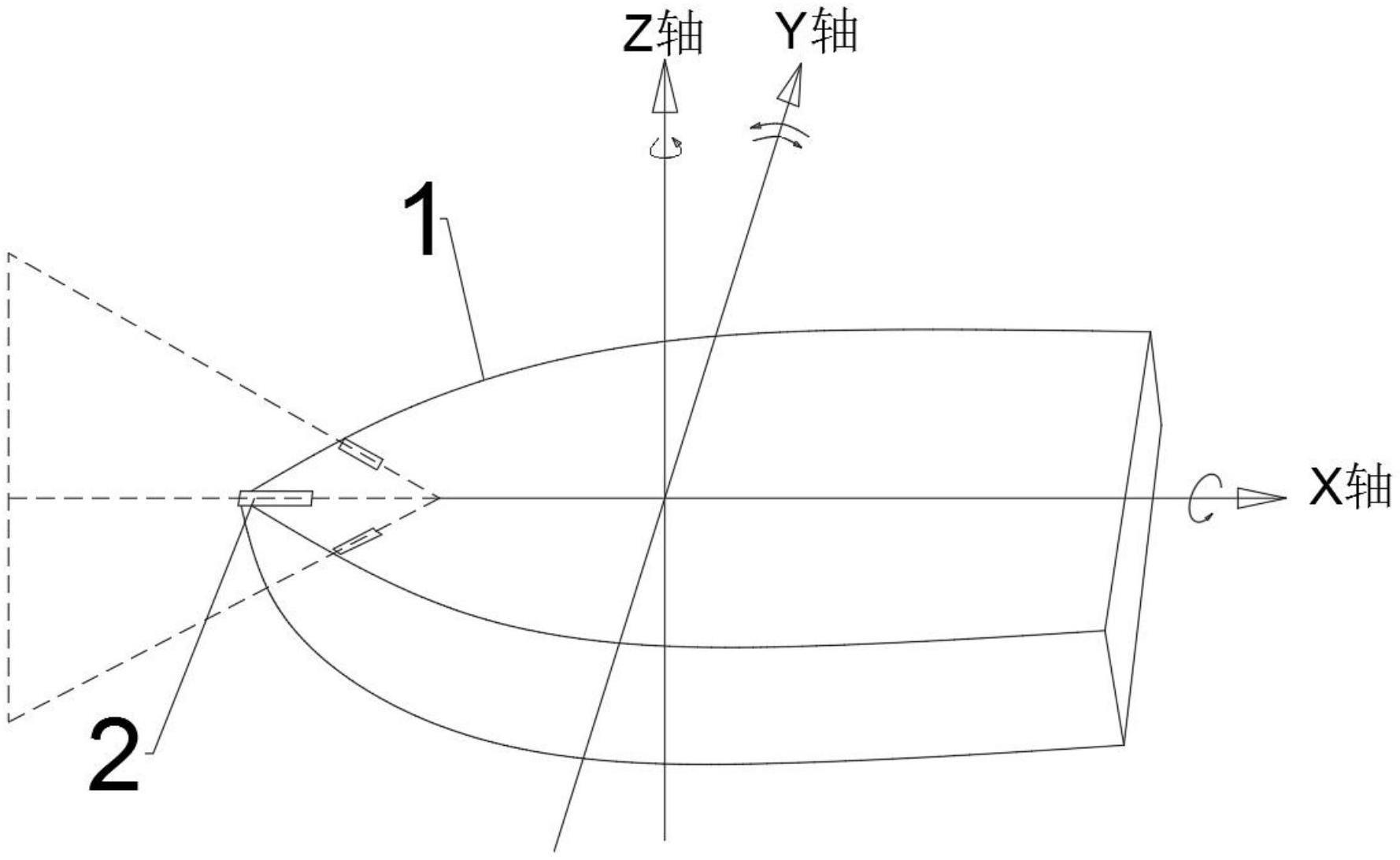
2、为解决上述技术问题,本实用新型提供一种用于水面移动平台的自动避障系统,其用于控制水面移动平台自动进行避障预警动作,其所述自动避障系统包括至少三组单点激光雷达组件及联动配套的控制系统,其中至少一组单点激光雷达组件设置于水面移动平台的头部正前位置,两组单点激光雷达组件对称设置于水面移动平台的头部两侧位置,且所述单点激光雷达组件均处于同一水平面内,所述单点激光雷达组件分别通讯连接控制系统。
3、作为本实用新型的一种改进,每组所述单点激光雷达组件均包括一个单点短距激光雷达及一个三轴倾角传感器,且每组单点激光雷达组件中单点短距激光雷达的激光发射方向与三轴倾角传感器的x轴重合。
4、作为本实用新型的进一步改进,以经过水面移动平台头部正前的单点激光雷达组件所在位置的直线为对称轴,所述水面移动平台呈轴对称结构。
5、作为本实用新型的一种改进,位于水面移动平台头部两侧位置的单点激光雷达组件中激光发射方向分别与对称轴所在直线呈45度夹角。
6、作为本实用新型的进一步改进,每组单点激光雷达组件中,当三轴倾角传感器x轴处于水平状态时,所述单点短距激光雷达发出并接受被障碍物返回的激光光束;当三轴倾角传感器x轴未处于水平状态时,所述单点短距激光雷达不工作。
7、作为本实用新型的一种改进,所述单点激光雷达组件共设置三组,其中一组单点激光雷达组件处于水面移动平台的对称轴线上,且安设于水面移动平台的头部位置;另外两组单点激光雷达组件分别对称设置于水面移动平台的对称轴线两侧;三组单点激光雷达组件的激光发射方向的反向延长线汇集于同一交点。
8、采用这样的设计后,本实用新型至少具有以下优点:
9、本实用新型的自动避障系统中通过将普通的单点短距激光雷达与在相同几何空间中同轴向平面安装的三轴倾角传感器配合联动,确保激光雷达始终保持在水平方向上进行激光探测,可以有效避免因水体波浪对移动平台倾斜或俯仰姿态的影响,通过保证多组不同指向的单点激光雷达组件只在轴向平行于水面的瞬间进行连续收发探测,从而可以有效避免激光照入水面或空中引起的避障误报或漏报,该自动避障系统中仅采用单点短距激光雷达与三轴倾角传感器配合,即可在有效控制成本的前提下,实现复杂应用场景下,水面移动载体的简易避障动作,其结构简单,占用体积小。
技术特征:
1.一种用于水面移动平台的自动避障系统,其用于控制水面移动平台自动进行避障预警动作,其特征在于,所述自动避障系统包括至少三组单点激光雷达组件及联动配套的控制系统,其中至少一组单点激光雷达组件设置于水面移动平台的头部正前位置,两组单点激光雷达组件对称设置于水面移动平台的头部两侧位置,且所述单点激光雷达组件均处于同一水平面内,所述单点激光雷达组件分别通讯连接控制系统。
2.根据权利要求1所述的自动避障系统,其特征在于,每组所述单点激光雷达组件均包括一个单点短距激光雷达及一个三轴倾角传感器,且每组单点激光雷达组件中单点短距激光雷达的激光发射方向与三轴倾角传感器的x轴重合。
3.根据权利要求2所述的自动避障系统,其特征在于,以经过水面移动平台头部正前的单点激光雷达组件所在位置的直线为对称轴,所述水面移动平台呈轴对称结构。
4.根据权利要求1-3任一项所述的自动避障系统,其特征在于,位于水面移动平台头部两侧位置的单点激光雷达组件中激光发射方向分别与对称轴所在直线呈45度夹角。
5.根据权利要求2所述的自动避障系统,其特征在于,每组单点激光雷达组件中,当三轴倾角传感器x轴处于水平状态时,所述单点短距激光雷达发出并接受被障碍物返回的激光光束;当三轴倾角传感器x轴未处于水平状态时,所述单点短距激光雷达不工作。
6.根据权利要求1所述的自动避障系统,其特征在于,所述单点激光雷达组件共设置三组,其中一组单点激光雷达组件处于水面移动平台的对称轴线上,且安设于水面移动平台的头部位置;另外两组单点激光雷达组件分别对称设置于水面移动平台的对称轴线两侧;三组单点激光雷达组件的激光发射方向的反向延长线汇集于同一交点。
技术总结
本技术公开了一种用于水面移动平台的自动避障系统,其用于控制水面移动平台自动进行避障预警动作,其特征在于,所述自动避障系统包括至少三组单点激光雷达组件及联动配套的控制系统,其中至少一组单点激光雷达组件设置于水面移动平台的头部正前位置,两组单点激光雷达组件对称设置于水面移动平台的头部两侧位置,且所述单点激光雷达组件均处于同一水平面内,所述单点激光雷达组件分别通讯连接控制系统,其解决了现有水面移动载体中自动避障系统易受水面起伏影响且设备体积大的问题,可在有效控制成本的前提下,实现复杂应用场景下,水面移动载体的简易避障动作,其结构简单,占用体积小。
技术研发人员:丁文,张晋京,吝凯
受保护的技术使用者:北京市农林科学院
技术研发日:20221230
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!