移动机器人轨迹跟踪PR控制系统、方法及参数自调整方法与流程
本发明涉及移动机器人控制,特别涉及一种移动机器人轨迹跟踪pr控制系统、方法及参数自调整方法。
背景技术:
1、移动机器人根据场景状况进行轨迹规划,依据该规划的路线行走,完成移动任务,轨迹跟踪精度的高低,不仅影响着移动机器人在场景中的运行效率,甚至影响其移动的安全性,因此,如何提高作为体现移动机器人性能的主要指标之一的轨迹跟踪的精度一直是行业关注的重点问题。
2、要提高轨迹跟踪精度,不仅要依据场景状况合理科学的规划路线,采用较高性能的传感器件,而且还要设计更加优化的控制方法。
3、移动机器人位姿控制常采用pd控制(比例微分)方法,该方法中,需要对移动机器人的位姿角度、移动位置等进行微分计算,而对角度、位置等信号数据的微分计算往往在实际中会引起额外的信号噪音或数据噪音,该噪音会对最终控制效果造成很大影响,降低轨迹跟踪精度。
4、因此,目前亟需一种新的移动机器人的控制方法,来提高轨迹跟踪的精度。
技术实现思路
1、为了解决传统pd控制易引起数据噪音从而轨迹跟踪精度降低的问题,本发明中披露了一种移动机器人轨迹跟踪pr控制系统(比例-延迟控制)、方法及参数自调整方法,本发明的技术方案是这样实施的:
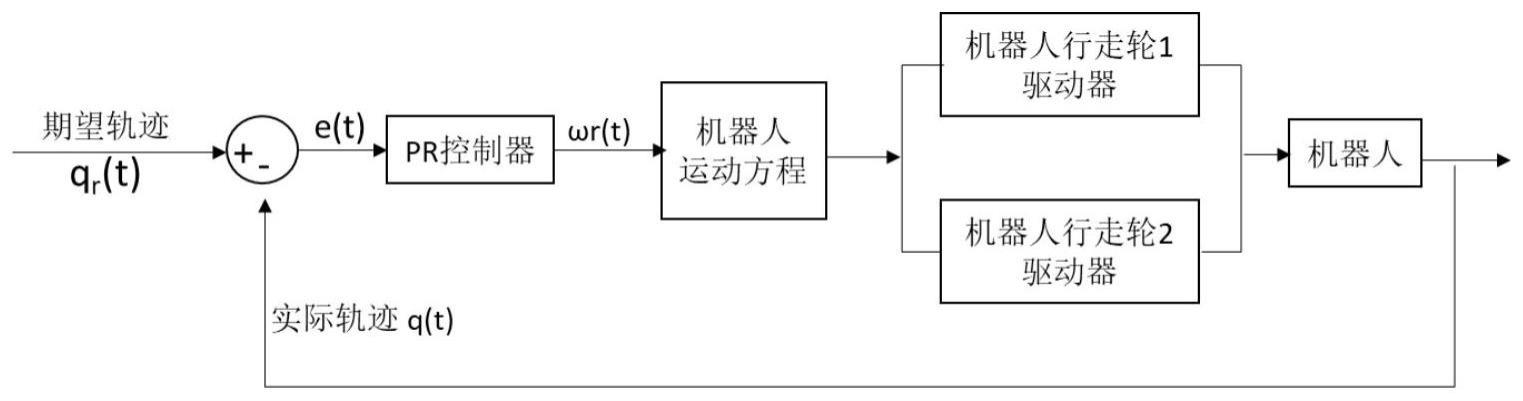
2、一种用于移动机器人轨迹跟踪的pr控制系统,包括pr控制器、机器人运动方程、行走轮驱动器;
3、pr控制器根据行走轮驱动器实时反馈的实际轨迹与预设的期望轨迹计算出轨迹误差,并根据轨迹误差输出期望速度指令;
4、机器人运动方程接收并分解来自pr控制器的指令然后下发给行走轮驱动器;
5、行走轮驱动器控制移动机器人的行走轮运动并反馈实时的实际轨迹给pr控制器;
6、其中,
7、q(t)=[x(t),y(t),θ(t)]t;
8、qr(t)=[xr(t),yr(t),θr(t)]t;
9、e(t)=[ex(t),eyt),er(t)]t;
10、ωr(t)=kpe(t)-kre(t-h);
11、以上各式中,t为时刻,qr(t)动机器人在t时刻的期望轨迹,q(t)为移动机器人在t时刻的实际轨迹,e(t)为移动机器人在t时刻的轨迹误差,ωr(t)为期望速度,kp为比例系数,kr为延迟系数,h为pr控制器设定的延迟时间;t为时间常数,x(t)和y(t)为移动机器人在t时刻的坐标,θ(t)为移动机器人在t时刻的姿态角度。
12、优选地,还包括prr前馈控制器(比例-延迟-延迟前馈控制);
13、prr前馈控制器根据移动机器人两个先后时刻的期望轨迹指令之差乘以前馈系数得出前馈控制量,prr前馈控制器输出前馈控制量与pr控制器输出量叠加后形成叠加期望速度输出至机器人运动方程;
14、其中,
15、u(t)=kf(qr(t-h)-qr(t-2h);
16、式中,u(t)为前馈控制量,kf为为前馈增益。
17、一种用于移动机器人轨迹跟踪的pr控制方法,包括步骤如下:
18、a1,建立移动机器人的pr控制系统并进行参数初始化;
19、a2,计算移动机器人的期望轨迹与实际轨迹的轨迹误差;
20、a3,将轨迹误差输入至pr控制器;
21、a4,pr控制器根据轨迹误差输出期望速度指令至机器人运动方程;
22、a5,机器人运动方程分解期望速度指令至行走轮驱动器;
23、a6,行走轮驱动器控制行走轮移动完成移动任务。
24、优选地,所述a4步骤中,还包括prr前馈控制;prr前馈控制器输出前馈控制量与pr控制器输出量叠加后形成叠加期望速度输出至机器人运动方程;
25、所述a5步骤中,机器人运动方程分解叠加期望速度指令至行走轮驱动器;
26、其中,
27、ωr*(t)=u(t)+ωr(t);
28、式中,ωr*(t)为叠加期望速度指令。
29、一种用于移动机器人轨迹跟踪的pr控制器的参数自动调整方法,包括步骤如下:
30、b1,pr控制器向机器人运动方程输出期望速度指令;
31、b2,机器人运动方程分解期望速度指令并下发至行走轮驱动器;
32、b3,行走轮驱动器控制移动机器人的行走轮运动并反馈实际轨迹;
33、b4,计算期望轨迹与实际轨迹的误差;
34、b5,将误差输入权重迭代计算模块和回归计算模块;
35、b6,迭代计算模块通过迭代计算获得权重最优值;
36、b7,将权重最优值代入回归计算模块中的回归方程并计算输出并跟踪误差;
37、b8,稳态跟踪误差及收敛速度是否满足要求;若满足,输出权重最优值;若不满足,改变数值点值重新进入b6;
38、b9,根据稳态误差最小原则选择pr控制器的比例系数和延时系数。
39、本发明解决了传统pd控制方法存在微分计算会产生噪音降低轨迹跟踪精度的问题,通过pr控制器来对移动机器人轨迹跟踪,提高了轨迹跟踪精度。并基于该pr控制方法,实施了前馈控制,进一步提高了轨迹跟踪精度。另外,本发明还提出了基于回归计算方法的方式对pr控制参数进行自动调整,实现了pr控制器参数的自动调整的技术效果。
技术特征:
1.一种用于移动机器人轨迹跟踪的pr控制系统,包括pr控制器、机器人运动方程、行走轮驱动器;
2.根据权利要求1所述的系统,其特征在于,还包括prr前馈控制器;
3.一种用于移动机器人轨迹跟踪的pr控制方法,包括步骤如下:
4.根据权利要求3所述的方法,其特征在于,所述a4步骤中,还包括prr前馈控制;prr前馈控制器输出前馈控制量与pr控制器输出量叠加后形成叠加期望速度输出至机器人运动方程;
5.一种用于移动机器人轨迹跟踪的pr控制器的参数自动调整方法,包括步骤如下:
技术总结
本发明涉及移动机器人控制技术领域的一种用于移动机器人轨迹跟踪的PR控制系统、方法及参数自动调整方法,PR控制器根据行走轮驱动器实时反馈的实际轨迹与预设的期望轨迹计算出轨迹误差,并根据轨迹误差输出期望速度指令;机器人运动方程接收并分解来自PR控制器的指令然后下发给行走轮驱动器;行走轮驱动器控制移动机器人的行走轮运动并反馈实时的实际轨迹给PR控制器通过PR控制(比例‑延迟)方法取代了原有的PD控制方法,剔除了传统PD控制器中的微分环节,消除了因微分计算造成的噪声干扰,提高了移动机器人的轨迹跟踪精度,此外,本发明还提出了基于回归计算方法的方式对PR控制参数进行自动调整,以解决PR控制器参数的自动调整问题。
技术研发人员:董易,邹金沛,韦鲲,张建政,李方保
受保护的技术使用者:上海飒智智能科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!