一种基于滑模控制的无人艇路径跟踪控制方法
本发明涉及无人艇路径跟踪技术,特别是涉及一种基于滑模控制的无人艇路径跟踪控制方法。
背景技术:
1、近年来,随着无人驾驶技术的兴起和发展,无人艇作为一种小型化、智能化、多用途无人海洋运载平台,获得了学者们的广泛关注,其中路径跟踪技术在军事和民用领域具有重要的应用价值。无人艇的运动控制面临着控制输入饱和限制、模型不确定性、非线性和强外部扰动等研究难点,给无人艇有效可靠的目标跟踪控制带来了挑战。其中qin h等利用双曲正切函数来解决控制输入饱和的问题,利用神经网络对模型不确定性和环境干扰进行估计,并在此基础上设计了一种有限时间稳定的欠驱动无人艇轨迹跟踪控制方法,然后依据仿真实验于分析表明所提控制方法的有效性,但该方案计算量大,实际应用效果不强。b.bernhardsson等人针对一些简单系统比较了基于时间周期采样和事件触发机制的控制性能,实验结果表明,事件触发控制可以使系统中控制信号的更新次数更少,但在无人艇控制领域应用较少。目前,如滑模变结构控制、自抗扰控制等理论均成功应用于实际项目,但在无人艇控制器输入饱和限制和执行器损耗这类问题,并未得到合理的解决。
2、现有的,在欠驱动水面无人艇路径跟踪控制研究中提出的利用鲁棒控制与滑模控制相结合来实现欠驱动无人艇的路径跟踪控制,首先构建欠驱动无人艇的三自由度数学模型,包括运动学模型和动力学模型,随后采用鲁棒控制、滑模控制来设计路径跟踪控制器,最后用稳定性分析方法和仿真实验分析验证控制策略的稳定性和有效性。该现有技术虽优点很明显,对本身不确定参数变化和外部环境的适应能力强,但计算量过大以及对扰动输入饱和没有进一步的处理和优化,在消除抖振方面没有充分的考虑,并且该算法过于复杂,控制器更新过于频繁,不容易应用于实际工程。
技术实现思路
1、发明目的:本发明的目的是提供一种基于滑模控制的无人艇路径跟踪控制方法。
2、技术方案:本发明的一种基于滑模控制的无人艇路径跟踪控制方法,包括:
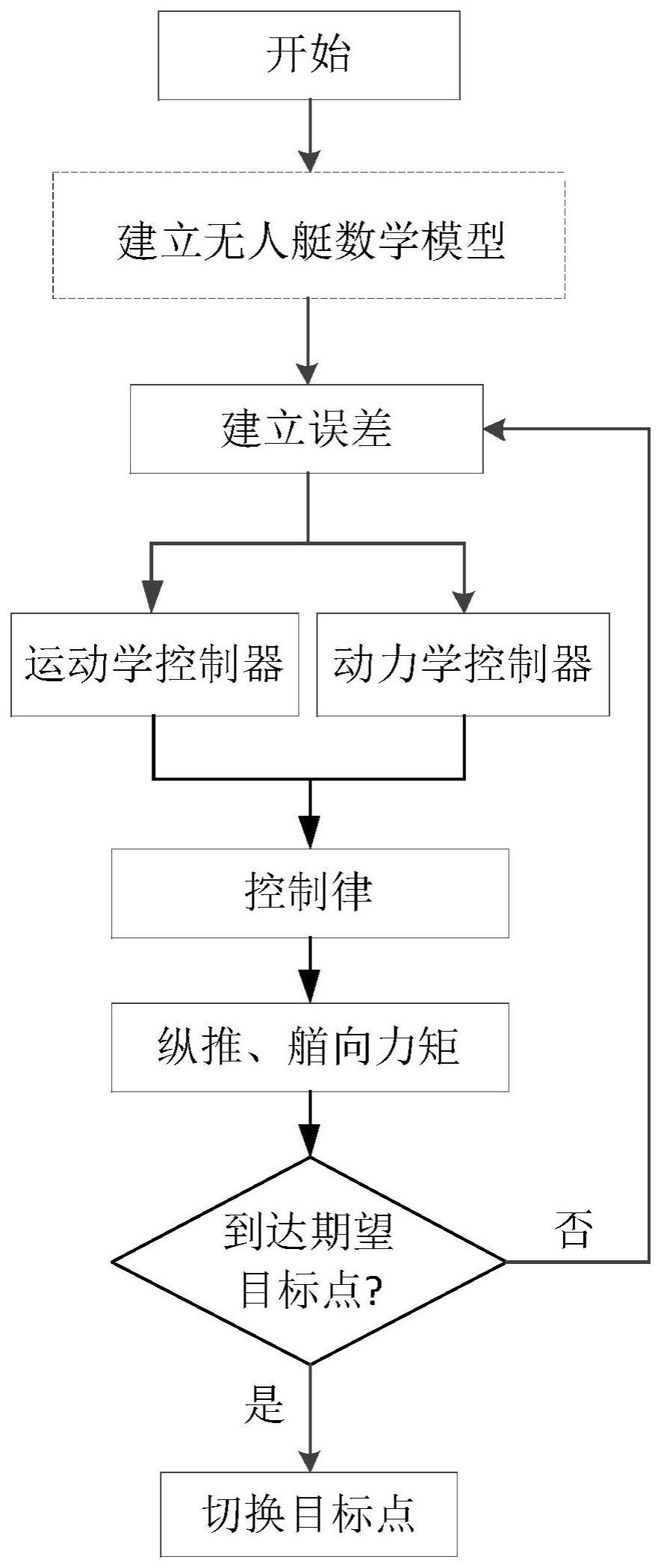
3、s1、建立惯性坐标系和无人艇附体坐标系,建立欠驱动水面无人艇三自由度的运动学、动力学数学模型;
4、s2、设计运动学控制器,包括建立无人艇位置跟踪误差和速度跟踪误差,设计附体坐标系下的无人艇航行过程中的纵向速度u和横向速度v的期望速度ud、vd,通过期望速度实现对无人艇期望路径的跟踪;
5、s3、设计动力学控制器,包括采用饱和函数设计改进的纵向推力滑模控制律τu,以及艏向力矩滑模控制律τr,使得无人艇在航行过程中相对于惯性坐标系的纵向和横向速度能跟踪上虚拟控制输入ud、vd;
6、s4、设计辅助系统,用于消除内部扰动和输入饱和对控制性能的影响;
7、s5、在控制律中引入事件触发机制,用于节省控制器的计算量以及减少执行器的损耗;
8、s6、采用步骤s2至s5设计的无人艇路径跟踪控制器对无人艇路径进行跟踪控制,判断是否到达期望目标点,如果到达期望目标点,则切换目标点进行继续跟踪控制;否则,返回步骤s2重新设计无人艇路径跟踪控制器。
9、进一步的,步骤s1中建立的无人艇运动学模型为:
10、
11、无人艇动力学模型为:
12、
13、其中,(x,y,)是无人艇在惯性坐标系下前进位移、横向位移以及艏向角,分别为x,y,的微分;(u,v,r)为附体坐标系下前进速度、横漂速度及艏向角速度,分别为的u,v,r微分;(τu,τv,τr)为推力控制输入,τu为纵向推力,τv为横向推力,τv=0;τr为艏向力矩;(τwuτwvτwr)表示附体坐标系下的时变干扰;m11,m22,m33,d11,d22,d33均为系数矩阵参数。
14、进一步的,步骤s2中设计的期望速度ud、vd为:
15、
16、其中,kx,ky>0为控制器增益,lx,ly>0为饱和常数,xe,ye为位置跟踪误差,xd,yd为期望位置,tanh(·)为双曲正切函数。
17、进一步的,步骤s3中改进的纵向推力滑模控制律为:
18、
19、艏向力矩滑模控制律为:
20、
21、其中,k2≥0,为无人艇艏摇角速度滑模控制的指数趋近项系数;w2≥0,为无人艇艏摇角速度滑模控制的切换增益。
22、进一步的,步骤s4中辅助系统为:
23、
24、其中,θi为辅助系统的状态变量,为θi的微分;i=u、r,δτi代表实际输入与最大输入之间的差值,μi、δi、θg是大于0常数,θg→0,χ、为正奇数,且满足
25、加入辅助系统后的纵向推力控制律和艏向力矩滑模控制律为:
26、
27、σu、σr为调节参数。
28、进一步的,步骤s5中事件触发机制的事件触发条件为:
29、
30、其中,t代表时刻,tb为k时刻,tb+1为k+1时刻,为状态变量的估计值,xr为参考值,υ为触发阈值;
31、初始更新时间t0定义如下:
32、
33、本发明的一种基于滑模控制的无人艇路径跟踪控制系统,包括:
34、模型建立模块,用于基于惯性坐标系和无人艇附体坐标系建立水面无人艇三自由度的运动学、动力学数学模型;
35、控制器建立模块,用于建立水面无人艇跟踪控制器,包括设计运动学控制器、动力学控制器,并在控制器中加入辅助系统以消除内部扰动和输入饱和对控制性能的影响,同时,在控制律中进入事件触发机制,以节省控制器的计算量并减少执行器的损耗;
36、跟踪控制模块,采用设计的无人艇路径跟踪控制器对无人艇路径进行跟踪控制,判断是否到达期望目标点,如果到达期望目标点,则切换目标点进行继续跟踪控制;否则,返回重新设计无人艇路径跟踪控制器。
37、本发明的一种装置设备,包括存储器和处理器,其中:
38、存储器,用于存储能够在处理器上运行的计算机程序;
39、处理器,用于在运行所述计算机程序时,执行上述一种基于滑模控制的无人艇路径跟踪控制方法的步骤。
40、进一步的,一种存储介质,所述存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现上述一种基于滑模控制的无人艇路径跟踪控制方法的步骤。
41、有益效果:与现有技术相比,本发明显著的技术效果为:本发明考虑在未知环境扰动、控制器输入饱和、常规滑模切换面附近抖振以及控制器更新频繁问题,针对无人艇路径跟踪控制问题设计了改进滑模控制器;采用了基于抗饱和函数的改进趋近律,提升了控制精度,增强了系统的鲁棒性,有效地削弱了抖振的影响;针对控制器输入饱和的情况,设计了辅助系统,提升了控制性能;考虑到控制器更新次数过多和执行器损耗问题,引入了事件触发机制,为控制律设计了阈值事件触发条件,能够有效地减少控制器更新次数,减小计算量,减轻执行器损耗。
技术特征:
1.一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,包括:
2.根据权利要求1所述的一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,步骤s1中建立的无人艇运动学模型为:
3.根据权利要求1所述的一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,步骤s2中设计的期望速度ud、vd为:
4.根据权利要求1所述的一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,步骤s3中改进的纵向推力滑模控制律为:
5.根据权利要求1所述的一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,步骤s4中辅助系统为:
6.根据权利要求1所述的一种基于滑模控制的无人艇路径跟踪控制方法,其特征在于,步骤s5中事件触发机制的事件触发条件为:
7.一种基于滑模控制的无人艇路径跟踪控制系统,其特征在于,包括:
8.一种装置设备,其特征在于,包括存储器和处理器,其中:
9.一种存储介质,其特征在于,所述存储介质上存储有计算机程序,所述计算机程序被至少一个处理器执行时实现如权利要求1-6任一项所述一种基于滑模控制的无人艇路径跟踪控制方法的步骤。
技术总结
本发明的一种基于滑模控制的无人艇路径跟踪控制方法,包括:建立水面无人艇的运动学、动力学数学模型;设计无人艇航行过程中的纵向速度和横向速度的期望速度,实现对无人艇期望路径的跟踪;采用饱和函数设计改进的纵向推力滑模控制律和艏向力矩滑模控制律,使得无人艇在航行过程中相对于惯性坐标系的纵向和横向速度能跟踪上虚拟控制输入;设计辅助系统以消除内部扰动和输入饱和对控制性能的影响;在控制律中引入事件触发机制以节省控制器的计算量以及减少执行器的损耗;采用设计的无人艇路径跟踪控制器对无人艇路径进行跟踪控制。本发明将滑模控制、事件触发机制抗扰动策略及抗饱和策略相结合,提高了跟踪精度,减少了计算量等。
技术研发人员:戴晓强,赵源,王莹,郑宇航,曾庆军,许赫威
受保护的技术使用者:江苏科技大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!