一种路径跟踪与车身姿态协同控制方法
本发明涉及一种路径跟踪控制方法,特别提供了一种路径跟踪与车身姿态协同控制方法。
背景技术:
1、近年来,随着人工智能、芯片和传感器的飞速发展,智能化、网联化成为了汽车行业的研究热点,为汽车产业的持续升级注入了强大动力。智能汽车在具有驾驶行为可预测、减少交通事故发生率、提高通勤效率等诸多优点的同时,也对道德伦理和法律法规的稳定和发展提出了挑战,固公众对智能驾驶汽车安全性的要求要显著高于传统汽车。
2、在运动控制层面,智能汽车的行驶安全性主要包括如下两方面:准确地沿着期望路径行驶,避免碰撞与超出车道线;改变行驶方向时不侧翻,不侧滑,即在一定范围内保持车身姿态和操纵稳定性。
3、现阶段大多数智能汽车的运动控制是在不考虑车身姿态控制和操纵稳定性的情况下保证路径跟踪精度,即仅满足行驶安全性的第一点。但在实际路径跟踪过程中,车身姿态和路径跟踪精度之间相互耦合制约,在保持和提高路径跟踪精度的同时可能伴随着车身姿态和操纵稳定性的急剧恶化,增加了侧翻和侧滑的概率。
4、对于上述问题,现有的研究通过应用现代控制方法,基于传感器所获得的车辆方位、姿态等信息对车速、转向角、车身姿态等控制量不断修正,一定程度上保证了路径跟踪精度和抗侧倾安全性,但这些方法由于反馈控制本身的特点,难以解决控制周期初始时刻误差大、输出抖振等问题,同时由于不能解耦路径跟踪精度控制和车身姿态控制,极易造成精度和车身姿态同时恶化的情形。
技术实现思路
1、发明目的:针对现有控制方法初始误差大、系统抖振等缺点,本发明提供了一种基于车辆逆动力学模型的路径跟踪与车身姿态协同控制方法,构建并使用能准确反映自动驾驶汽车横—垂向运动耦合特性的逆动力学模型,克服了正向动力学模型阶数高、系统参数难确定、底盘执行系统非线性强等缺点,高度契合自动驾驶汽车控制流程,提高了系统反应速度和初始输出精度,降低了输出量的抖振。
2、技术方案:
3、一种路径跟踪与车身姿态协同控制方法,包括以下步骤:
4、步骤1、开启路径跟踪与车身姿态协同控制器,基于传感器获取的道路信息实时规划出期望路径;
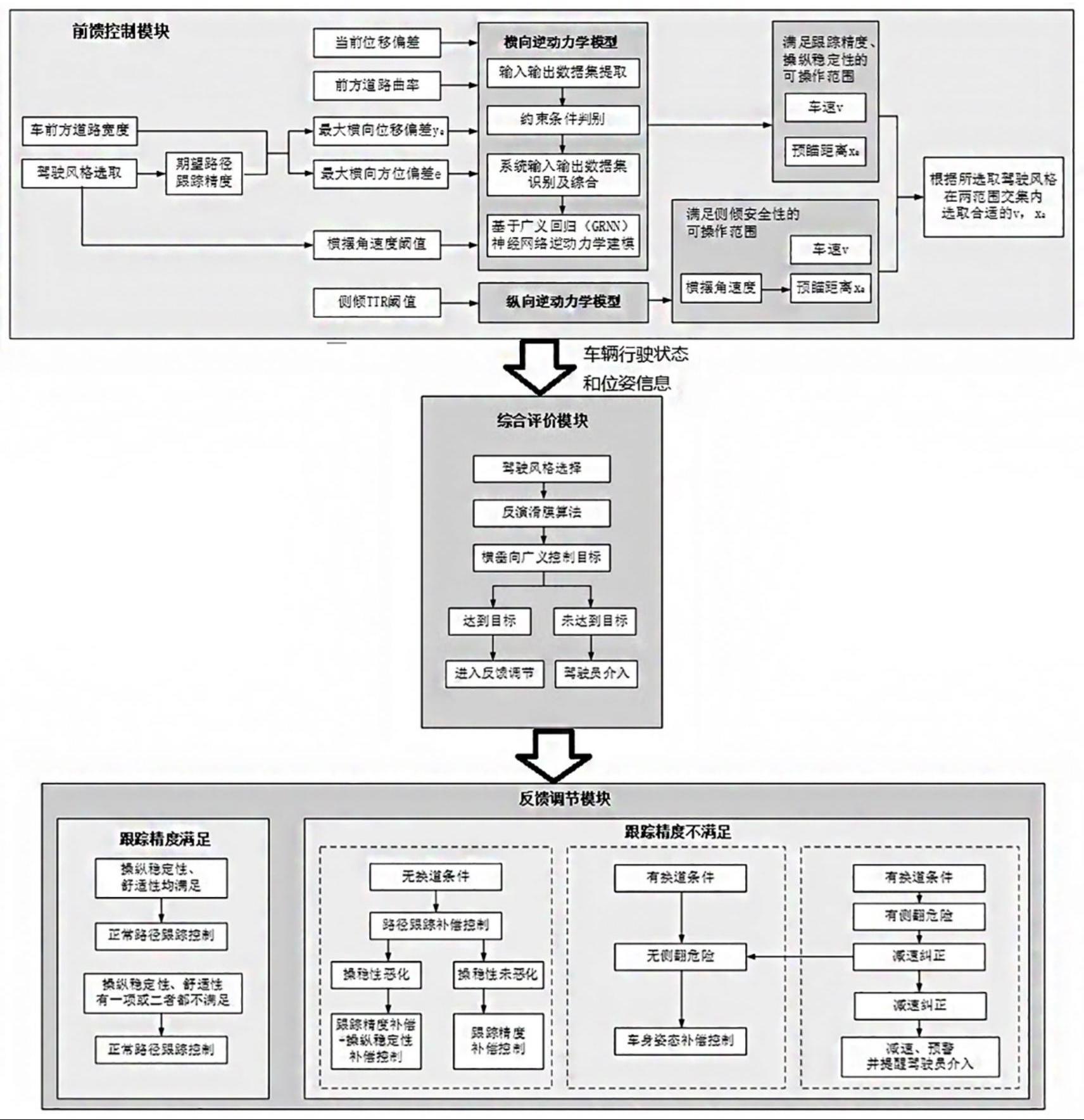
5、步骤2、车载计算机根据行驶需求、道路条件,基于车辆逆动力学模型对车辆进行前馈控制,优先满足路径跟踪精度和抗侧翻性能两个对行驶安全影响较大的控制目标;
6、步骤3、设置综合评价模块用于评价前一个控制周期的前馈控制效果,首先使用熵权融合的方法实时得到路径跟踪精度、车身姿态保持性能、振动舒适度、抗侧翻性能、防侧滑性能的权重,其方法是:
7、对传感器数据进行处理从而获取对路径跟踪精度、车身姿态保持性能、振动舒适度、抗侧翻性能、防侧滑性能等量化评价并进行归一化处理;
8、基于每个指标所对应的传感器数据,包括:路径跟踪精度对应横向位移偏差ye阈值、横向方位偏差e阈值、横摆角速度阈值we,得到该项指标的熵值,进而得到各指标权值;
9、根据驾驶员对行驶性能偏向的选择将路径跟踪精度和振动舒适度指标权重乘以系数k1和k2得到综合评价指标h,其中k1+k2=2,若驾驶性能偏向运动则k1取2,若偏向舒适则k1=0,其他情况在0和2之间线性调整;若熵权融合后的综合指标h小于0.8,则允许进入下一周期的前馈控制;若h大于0.8小于1,则暂停前馈控制只保留反馈控制模块;若h大于1,则提醒驾驶员介入;
10、步骤4、在一个控制周期内以前馈控制模块中的传感器最慢工作步长为负反馈控制步长,不断重复由前馈控制模块中的传感器到反馈调节模块的闭环控制,直到周期结束从前馈控制模块进入下一周期;
11、若行驶状态参数超出预警值,则预警并提示驾驶员介入,并直接跳出该控制周期进入下一周期。
12、进一步的,所述步骤2具体操作流程如下:
13、根据驾驶员对驾驶风格的选择,确立驾驶过程中对路径跟踪精度、车身姿态保持性能、振动舒适度、抗侧翻性能、防侧滑性能性能指标的偏向性;
14、车载计算机则根据传感器获取的道路、车流密度等情况结合驾驶风格确定性能需求,以及当前工况下路径跟踪系统和车身姿态系统控制参数的分配权重;
15、以路径跟踪精度、抗侧翻性能为约束条件,基于上述对各项性能的权重分配,求解表征约束条件的横向位移偏差ye阈值、横向方位偏差e阈值、横摆角速度阈值we;
16、通过对激光雷达获取的点云图和车载摄像头所获取图像进行噪点滤除、多帧融合、主要特征聚类的方式得到当前位移偏差和道路曲率,将当前位移偏差和前方x米的道路曲率和横向位移偏差ye阈值、横向方位偏差e阈值、横摆角速度阈值输入横向逆动力学模型,得到满足跟踪精度要求的车速vx和预瞄距离xe;其中x米的取值为过去2s的平均车速的数值乘以5;
17、通过车载三轴加速度计实时测得侧倾角和侧倾角速度,通过动平衡分析得到侧倾阈值ttr值并输入垂向逆动力学模型,得到满足抗侧翻性能的车速vx和预瞄距离xe;
18、当满足路径跟踪精度和抗侧翻性能的车速vx和预瞄距离xe有交集时,根据驾驶员所选取的驾驶风格选取车速vx和预瞄距离xe,并通过纵向逆动力学模型控制油门开度、档位和刹车以控制车速;
19、若满足路径跟踪精度需求和抗侧翻性能的车速vx和预瞄距离xe没有交集,则向驾驶员发出警示并直接进入反馈调节系统。
20、进一步的,所述步骤3具体控制逻辑如下:
21、当路径跟踪精度、操纵稳定性和舒适度均满足要求,以前馈+反馈正常进行路径跟踪;
22、当路径跟踪精度低于阈值,但操稳性和车身姿态均满足要求时,降低预瞄距离进行跟踪精度补偿;
23、当路径跟踪精度不满足要求且有换道条件、无侧翻危险时,对操稳性和舒适度进行姿态补偿;
24、当路径跟踪精度不满足要求、有换道条件但换道有侧翻危险时,对车辆减速纠正并进行姿态补偿;
25、当跟踪精度不满足且没有换道条件,对车辆进行跟踪精度补偿,若操稳性恶化则进行姿态补偿;
26、当车身姿态补偿和路径跟踪精度补偿都无法达到广义控制目标时,预警、制动减速并提示驾驶员介入。
27、进一步的,以路径跟踪精度、操纵稳定性和侧倾安全性为约束条件,基于道路条件、行驶状态和性能需求偏向算出侧倾时限ttr值、横向位移偏差ye阈值、横向方位偏差e阈值,将侧倾时限ttr值代入垂向逆动力学模型,将横向位移偏差ye阈值、横向方位偏差e阈值带入横向逆动力学模型,分别求解满足实时约束条件的车速vx和预瞄距离xe;
28、由两个逆动力学模型求解出的车速vx及预瞄距离xe在二维平面上分别构成闭合的平面,根据实时性能需求偏向在两封闭平面的重合区域内选择合适的车速vx和预瞄距离xe输出至执行机构。
29、进一步的,以道路参数、行驶状态参数和协同控制约束条件为输入,具体包括:前方道路曲率、当前车辆方位偏差ye、位移偏差e、横摆角速度、最大位移偏差阈值、最大方位偏差阈值,输出为满足路径跟踪精度和操纵稳定性要求的车速vx和预瞄距离xe;
30、垂向逆动力学模型输入为车身侧倾角速度、侧倾ttr时限阈值,输出为满足侧倾安全性的车速vx和预瞄距离xe。
31、进一步的,所述逆动力学模型获取方法如下:根据二自由度汽车开环系统模型和预瞄跟踪模型的运动微分方程,进行正向动力学模型求解,获取不同道路曲率、不同工况、不同预瞄距离下表述路径跟踪精度的输入输出数据集,得到路径跟踪系统输入输出的显式表达;
32、在此基础上,将广义回归神经网络应用到自动驾驶汽车横向逆动力学建模中,以车辆正常行驶即:不与道路边界碰撞、不侧翻为约束条件选取输入输出集,提取车辆侧倾角、侧倾角速度、横向位移偏差ye、横向方位偏差e,构建自动驾驶汽车正常路径跟踪系统多输入多输出数据集,对于广义回归神经网络求和层神经元数据加权求和进行匹配设计,最终得到准确反映车辆横向动力学和预瞄跟踪特性的逆动力学模型。
33、进一步的,基于车辆二自由度模型和预瞄跟踪模型得到输入输出集,并通过以下步骤实现:
34、基于二自由度车辆动力学方程,建立二自由度车辆动力学模型;
35、根据轮胎的侧偏角与车辆质心侧偏角、横摆角速度及质心距前后轴的距离等参数关系,结合牛顿第二定律,得到线性二自由度模型的运动微分方程为:
36、
37、式中m为整车质量,cf、cr为前后轮线性侧偏刚度,lf、lr为车辆质心距前后轴的距离,iz整车绕z轴的转动惯量,δf前轮转角,vx纵向车速;
38、预瞄误差系统的设计;预瞄误差模型的输入包括了车辆动力学模型的输出质心侧偏角和横摆角速度,以及外部输入道路曲率ρ和预瞄距离xe,预瞄误差模型的输出为横向位移偏差ye和横向方位偏差e,构建车辆的预瞄误差模型公式:
39、
40、式中,y为车辆预瞄点与中心线距离偏差,vy为车辆横移速度,vx为纵向车速,r为转向半径;
41、基于过去一个前馈控制周期内的数据对横向位移偏差ye和横向方位偏差e使用熵权融合法进行权重分配之后作为综合偏差e;
42、将上述得到的综合偏差e输入到pid控制器中,对过去至少两个前馈控制周期的综合偏差进行时域积分,基于积分结果使用pid控制方法输出补充车辆的前轮转角δf作为车辆动力学模型的控制量,以此形成路径跟踪横向运动的闭环控制系统。
43、进一步的,利用最优个体进行权重的优化,得到优化后的权重;
44、将优化好的初始权值和阈值代入神经网络,通过选择、交叉和变异操作找到最优适应度值对应的个体,进行网络误差的计算,根据计算结果对权值和阈值的修改,最终达到要求的精度;
45、其中,以三轴加速度的测量值及环境变量为输入节点,环境变量视情况而定,在网络训练结束后确实具体值,车身俯仰角和横滚角为输出节点,通过网络训练更改权值和阈值,直至精度达标。
46、进一步的,将车辆当前侧向加速度与实时侧向极限加速度的比值这一相对量作为侧翻判定条件,替代传统依靠侧倾角或侧向加速度绝对量进行侧翻预测的方法;
47、车辆在侧翻临界状态下的加速度为:
48、
49、式中,ay为重心位置的侧向加速度,ay,l为重心位置的侧翻临界侧向加速度,m为整车质量,ms是簧载质量,hcm为重心高度,t为轮距,h为重心到侧倾中心的距离,为侧倾角
50、ld=ay/ay,l
51、
52、式中,ay为重心位置的侧向加速度,ay,l为重心位置的侧翻临界侧向加速度,m为整车质量,ms是簧载质量,hcm为重心高度,t为轮距,h为重心到侧倾中心的距离,为侧倾角
53、基于ld值计算侧翻时限即ttr值,计算步长为10ms;
54、根据性能需求偏向决定进行车身姿态补偿的ttr阈值,
55、若协同控制性能需求偏向于跟踪精度,ttr阈值取较大值,使车辆转向时整车重心较低;
56、若协同控制需求偏向于舒适性,ttr阈值取较小值,ttr阈值与车速成正比。
57、进一步的,其中路径跟踪精度低于设定阈值,但操纵稳定性和舒适性度量值都不满足设定阈值时,优先考虑车辆的操纵稳定性和舒适性,对车辆进行车身姿态补偿,车身姿态补偿控制方法通过以下步骤实现:
58、通过控制车辆侧倾来改善车身姿态,侧倾发生产生的侧倾力矩由三部分组成:
59、1、簧载质量离心力引起的侧倾力矩mφri;
60、2、簧载质量重力引起的抗侧倾力矩mφrii;
61、3、非悬挂质量的离心力引起的侧倾力矩mφriii;
62、此外,侧倾时垂直载荷在左、右侧车轮载荷发生转移,产生载荷转移力矩mzf、mzr;当车身处于侧倾状态时,左右两侧悬架在当前状态下主动悬架作动器施加额外方向相反的力δf,可以形成抗侧倾力矩maf,可抑制车辆的侧倾;
63、簧上质量离心力引起的侧倾力矩mφr ⅰ为:
64、mφr ⅰ=ms·ay·h
65、mφr ⅰ为簧上质量离心力引起的侧倾力矩,ms为簧上质量,ay为车身质心加速度,h为质心高度;
66、簧上质量重力引起的抗侧倾力矩mφr ii为:
67、
68、mφr ii为簧上质量离心力引起的侧倾力矩,ms为簧上质量,e为质心到车轮的横向距离,ay为车身质心加速度,hg为车身较低一侧悬架与车身连接处到质心的高度,为车身侧倾角;
69、非悬挂质量的离心力引起的侧倾力矩mφriii为:
70、mφriii=-fuy(h0-r)
71、mφriii为非簧载质量引起的侧倾力矩,f为路面对车轮的指向转向中心的静摩擦力,u为车速,y为车身横向尺寸,h0为质心高度,r为车轮半径;
72、侧倾时垂直载荷在左、右侧车轮载荷发生转移,产生载荷转移力矩mzf、mzr为:
73、mzf=(frrf-frlf)·b/2
74、mzr=(frrr-frlr)·b/2
75、mzf为前侧车轮转移力矩,mzr为后侧车轮转移力矩,frrf为右前侧车轮转移力,frlf为左后侧车轮转移力,frrr为右后侧车轮转移力,frrr,b为车身宽度;
76、对车身纵向中心线取矩,即:
77、mφr i-mφrii+mφriii+mzf+mzr=maf
78、mφri为簧上质量离心力引起的侧倾力矩,mφrii为簧上质量离心力引起的侧倾力矩,mφriii为非簧载质量引起的侧倾力矩,mzf为前侧车轮转移力矩,mzr为后侧车轮转移力矩,maf为作动器提供的抗侧倾力矩。
79、有益效果:本发明提供了一种路径跟踪与车身姿态协同控制方法,构建并使用能准确反映自动驾驶汽车横—垂向运动耦合特性的逆动力学模型,克服了正向动力学模型阶数高、系统参数难确定、底盘执行系统非线性强等缺点,高度契合自动驾驶汽车控制流程,提高了系统反应速度和初始输出精度,降低了输出量的抖振。
- 还没有人留言评论。精彩留言会获得点赞!