一种道路清扫方法、装置、电子设备及存储介质与流程
本发明涉及自动驾驶,尤其涉及一种道路清扫方法、装置、电子设备及存储介质。
背景技术:
1、无人驾驶技术是传感器、计算机、人工智能、通信、导航定位、模式识别、机器视觉、智能控制等多门前沿学科的综合体。无人驾驶汽车又称自动驾驶汽车、电脑驾驶汽车或轮式移动机器人,是一种通过电脑系统实现无人驾驶的智能汽车。
2、随着无人驾驶的普及,无人驾驶开始逐步应用于公共事业之中,如通过无人清扫车参与环境清扫。
3、然而,无人清扫车在清扫的过程中,无法清扫体积较大或质量较大的障碍物,导致清扫效果较差。且如果无法规避体积较大但质量较轻的障碍物,则有可能导致车底吸盘堵塞,导致清扫功能丧失,清扫效果变差。
技术实现思路
1、本发明提供了一种道路清扫方法、装置、电子设备及存储介质,用于解决无人清扫车无法清扫体积较大或质量较大的障碍物导致清扫效果较差的技术问题。
2、本发明提供了一种道路清扫方法,应用于无人清扫车;所述方法包括:
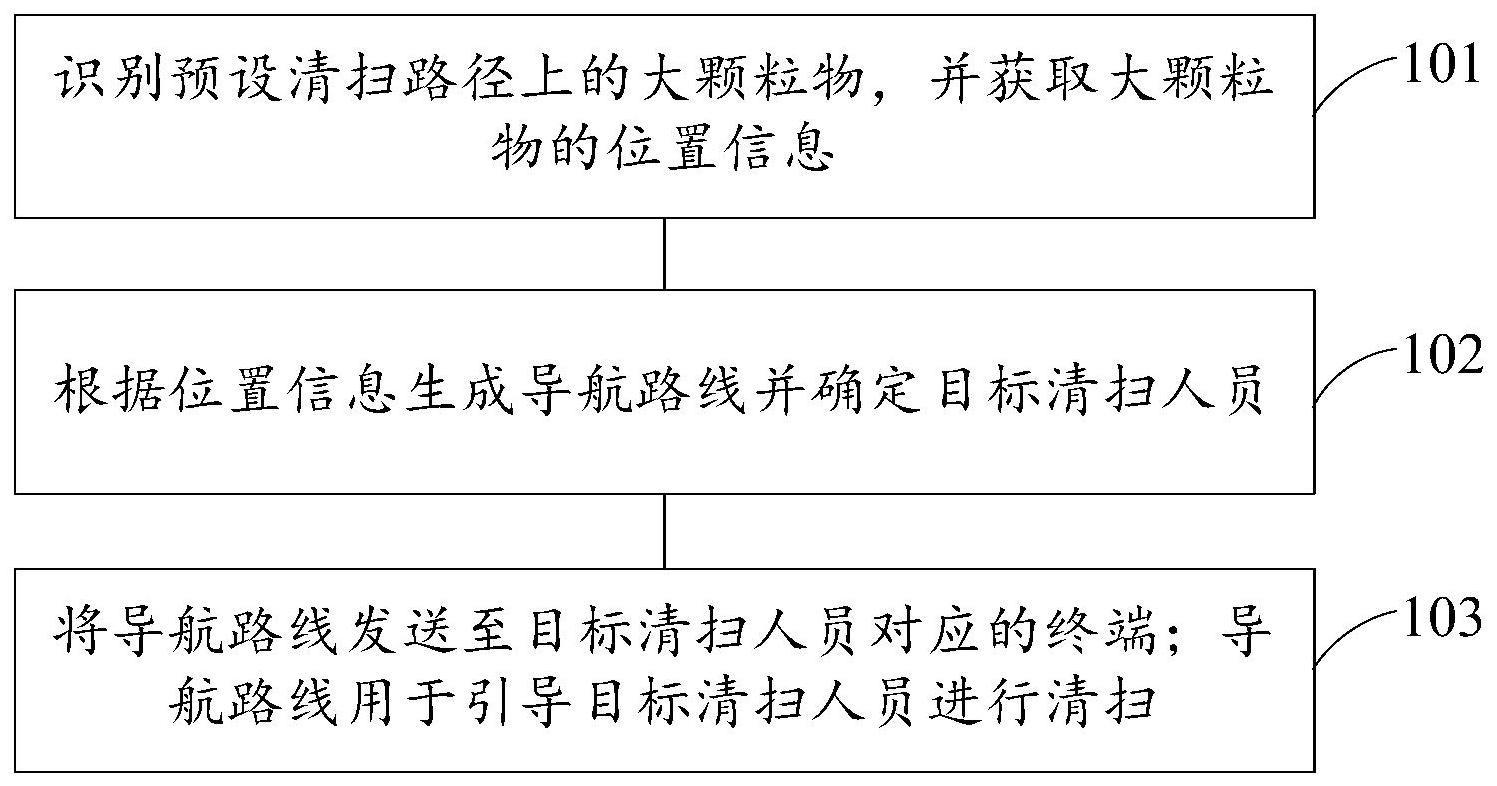
3、识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息;
4、根据所述位置信息生成导航路线并确定目标清扫人员;
5、将所述导航路线发送至所述目标清扫人员对应的终端;所述导航路线用于引导所述目标清扫人员进行清扫。
6、可选地,所述识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息的步骤,包括:
7、通过前置摄像头采集未经过的预设清扫路径上的第一障碍物图像;
8、识别所述第一障碍物图像中的第一障碍物,并获取所述第一障碍物的尺寸信息;
9、当所述尺寸信息满足预设尺寸阈值时,将所述第一障碍物确定为大颗粒物,并获取所述大颗粒物的位置信息。
10、可选地,所述获取所述大颗粒物的位置信息的步骤之后,还包括:
11、以所述位置信息为绕行点,生成新的清扫路径。
12、可选地,所述识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息的步骤,还包括:
13、通过盲区摄像头采集已经过的所述清扫路径上的第二障碍物图像;
14、识别所述第二障碍物图像中的第二障碍物,将所述第二障碍物确定为大颗粒物,并获取所述大颗粒物的位置信息。
15、可选地,所述根据所述位置信息生成导航路线并确定目标清扫人员的步骤,包括:
16、将所述清扫路径划分为多个网格;
17、将处于所述网格内的清扫人员确定为所述网格的目标清扫人员;
18、获取所述网格内的目标清扫人员的当前位置;
19、根据所述目标清扫人员的当前位置和所述网格内各大颗粒物的位置信息,生成导航路线。
20、可选地,所述根据所述目标清扫人员的当前位置和所述网格内各大颗粒物的位置信息,生成导航路线的步骤,包括:
21、按照所述目标清扫人员的当前位置和所述网格内各大颗粒物的位置信息,计算各大颗粒物与所述目标清扫人员之间的第一相对距离,以及各大颗粒物之间的第二相对距离;
22、以所述目标清扫人员的当前位置为起点,将第一相对距离最小的大颗粒物确定为第一清扫对象;
23、连接所述目标清扫人员和所述第一清扫对象,生成初始导航路线;
24、以所述第一清扫对象为起点,将与所述第一清扫对象的第二相对距离最小的大颗粒物作为第二清扫对象;
25、连接所述第一清扫对象和所述第二清扫对象,得到更新导航路线;
26、判断所述网格中是否存在未连接的大颗粒物;
27、若是,将所述第二清扫对象作为第一清扫对象,并返回以所述第一清扫对象为起点,将与所述第一清扫对象的第二相对距离最小的大颗粒物作为第二清扫对象的步骤;
28、若所述网格中不存在未连接的大颗粒物,将所述更新导航路线作为所述网格内大颗粒物的导航路线。
29、本发明还提供了一种道路清扫装置,应用于无人清扫车;所述装置包括:
30、识别模块,用于识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息;
31、路线及目标清扫人员确定模块,用于根据所述位置信息生成导航路线并确定目标清扫人员;
32、发送模块,用于将所述导航路线发送至所述目标清扫人员对应的终端;所述导航路线用于引导所述目标清扫人员进行清扫。
33、可选地,所述识别模块,包括:
34、第一障碍物图像采集子模块,用于通过前置摄像头采集未经过的预设清扫路径上的第一障碍物图像;
35、尺寸信息获取子模块,用于识别所述第一障碍物图像中的第一障碍物,并获取所述第一障碍物的尺寸信息;
36、第一大颗粒物确定子模块,用于当所述尺寸信息满足预设尺寸阈值时,将所述第一障碍物确定为大颗粒物,并获取所述大颗粒物的位置信息。
37、本发明还提供了一种电子设备,所述设备包括处理器以及存储器:
38、所述存储器用于存储程序代码,并将所述程序代码传输给所述处理器;
39、所述处理器用于根据所述程序代码中的指令执行如上任一项所述的道路清扫方法。
40、本发明还提供了一种计算机可读存储介质,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行如上任一项所述的道路清扫方法。
41、从以上技术方案可以看出,本发明具有以下优点:本发明还提供了一种道路清扫方法,包括:识别预设清扫路径上的大颗粒物,并获取大颗粒物的位置信息;根据位置信息生成导航路线并确定目标清扫人员;将导航路线发送至目标清扫人员对应的终端;导航用于引导目标清扫人员进行清扫。本发明通过识别清扫路径上的大颗粒物,并确定大颗粒物的位置信息以生成导航路线,从而通过导航路线引导目标清扫人员进行清扫,以清除无人清扫车无法清扫的体积较大或质量较大的障碍物,提高清扫效果。
技术特征:
1.一种道路清扫方法,其特征在于,应用于无人清扫车;所述方法包括:
2.根据权利要求1所述的方法,其特征在于,所述识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息的步骤,包括:
3.根据权利要求2所述的方法,其特征在于,所述获取所述大颗粒物的位置信息的步骤之后,还包括:
4.根据权利要求2所述的方法,其特征在于,所述识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息的步骤,还包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述位置信息生成导航路线并确定目标清扫人员的步骤,包括:
6.根据权利要求5所述的方法,其特征在于,所述根据所述目标清扫人员的当前位置和所述网格内各大颗粒物的位置信息,生成导航路线的步骤,包括:
7.一种道路清扫装置,其特征在于,应用于无人清扫车;所述装置包括:
8.根据权利要求7所述的装置,其特征在于,所述识别模块,包括:
9.一种电子设备,其特征在于,所述设备包括处理器以及存储器:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质用于存储程序代码,所述程序代码用于执行权利要求1-6任一项所述的道路清扫方法。
技术总结
本发明公开了一种道路清扫方法、装置、电子设备及存储介质,用于解决无人清扫车无法清扫体积较大或质量较大的障碍物导致清扫效果较差的技术问题。本发明包括:识别预设清扫路径上的大颗粒物,并获取所述大颗粒物的位置信息;根据所述位置信息生成导航路线并确定目标清扫人员;将所述导航路线发送至所述目标清扫人员对应的终端;所述导航路线用于引导所述目标清扫人员进行清扫。本发明通过识别清扫路径上的大颗粒物,并确定大颗粒物的位置信息以生成导航路线,从而通过导航路线引导目标清扫人员进行清扫,以清除无人清扫车无法清扫的体积较大或质量较大的障碍物,提高清扫效果。
技术研发人员:潘秉旺,马蓝宇
受保护的技术使用者:广州文远知行科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!