一种螺旋桨无人机自主着陆避障能力分析方法与流程
1.本发明涉及无人机性能分析领域,具体涉及一种螺旋桨无人机自主着陆避障能力分析方法。
背景技术:
2.本节中的陈述仅提供与本公开相关的背景信息,并且可能不构成现有技术。
3.随着我国通用航空的高速发展,通用机场越来越多,但各机场跑道长度、升降带、净空区障碍物情况存在显著差异,需要对不同着陆能力的飞机进行适用性分析以保障飞行安全;尽管部分民航适航规定ccar23和ccar25对螺旋桨飞机的着陆性能和着陆航迹都作了具体的规定,但没有明确的设计思路和计算流程。
4.不同于有人机,无人机的着陆过程由程序设定自主着陆逻辑实现,需要基于不同重量、不同构型和不同海拔高度(不同功率)下的着陆性能和避障能力的分析结果,设计自主着陆逻辑;尤其是低速螺旋桨无人机自身着陆能力弱,受自主着陆逻辑控制,其在不同通航机场条件的使用能力存在不确定性,着陆安全受到威胁,甚至造成严重的生命和财产损失,需要进行与通航机场条件适用性的精确计算和分析;其中,通航机场低速螺旋桨无人机短跑道着陆避障场景如图7所示。
技术实现要素:
5.本发明的目的在于:针对目前低速螺旋桨无人机自身着陆能力弱,受自主着陆逻辑控制,其在不同通航机场条件的使用能力存在不确定性,着陆安全受到威胁,甚至造成严重的生命和财产损失的问题,提供了一种螺旋桨无人机自主着陆避障能力分析方法,该方法按照无人机正常自主着陆过程的几个重要阶段——着陆下滑、接地着陆、地面滑跑,对气动力和螺旋桨拉力状态进行连续变换,对关联的重要性能数据进行连续解算,实现无人机自主着陆避障能力分析,从而解决了上述问题。
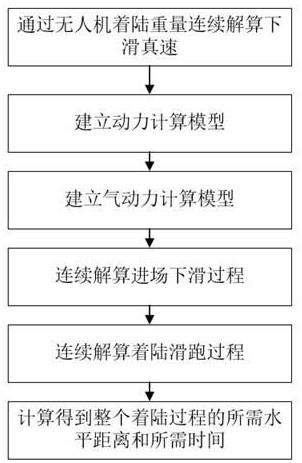
6.本发明的技术方案如下:一种螺旋桨无人机自主着陆避障能力分析方法,包括:步骤s1:通过无人机着陆重量连续解算下滑真速;步骤s2:建立动力计算模型;步骤s3:建立气动力计算模型;步骤s4:连续解算进场下滑过程;利用下滑真速,在下滑俯仰力矩模型、下滑合力计算模型、下滑风门开度模型的基础上,结合动力计算模型和气动力计算模型,计算下滑角,以及整个下滑阶段的下滑时间、水平距离和着陆接地重量;步骤s5:连续解算着陆滑跑过程;对着陆接地进行受力分析,并结合着陆合力模型、接地俯仰力矩模型、起刹前滑跑减速模型和起刹后滑跑减速模型,计算滑跑总时间和滑跑总距离;步骤s6:基于步骤s4得到的整个下滑阶段的时间、水平距离和步骤s5得到的滑跑
总时间和滑跑总距离,计算得到整个着陆过程的所需水平距离和所需时间。
7.进一步地,所述步骤s1,包括:步骤s11:已知无人机着陆重量,根据试飞数据建立的海平面标准大气压下着陆重量与引导下滑表速对应关系,对无人机着陆重量进行插值得到引导下滑表速;步骤s12:根据下滑高度判定下滑方式;当下滑高度大于中间下滑点高度时,进行陡下滑,陡下滑表速仍为;当下滑高度小于中间下滑点高度时,进行浅下滑,浅下滑表速根据民用运输机场标准或军用机场标准进行插值换算,得到浅下滑表速;步骤s13:将判定后的下滑表速定义为;步骤s14:根据海平面标准大气密度和飞行海拔高度对应的大气密度将判定后的下滑表速转换为下滑真速;所述下滑真速的计算公式如下:其中:为飞行海拔高度。
8.进一步地,所述步骤s2,包括:步骤s21:将无人机发动机的风门开度设定为,根据发动机台架试验建立的发动机风门开度与转速对应关系,对风门开度进行插值得到插值发动机转速;步骤s22:选定发动机转速-功率模型,将插值发动机转速rpmr带入选定的发动机转速-功率模型,得到发动机功率;步骤s23:根据无人机螺旋桨-发动机匹配关系,计算发动机输出至螺旋桨做功功率;所述发动机输出至螺旋桨做功功率的计算公式如下:其中:为由试飞数据分析得到的发动机功率修正系数;为发动机进气道总压恢复系数;为单台发动机提取功率;步骤s24:根据发动机-螺旋桨传动比模型确定传动比;步骤s25:计算螺旋桨功率系数和螺旋桨进距比;
所述螺旋桨功率系数和螺旋桨进距比的计算公式如下:的计算公式如下:其中:为螺旋桨直径;为飞行速度;步骤s26:根据螺旋桨数据库对螺旋桨功率系数和螺旋桨进距比进行插值计算得到螺旋桨拉力系数;步骤s27:根据螺旋桨拉力效率修正模型和试飞数据得到的螺旋桨装机拉力效率,计算修正螺旋桨装机拉力效率,并计算螺旋桨输出拉力;所述修正螺旋桨装机拉力效率的计算公式如下:其中:为修正因子;所述螺旋桨输出拉力的计算公式如下:其中:为重力加速度;步骤s28:考虑拉桨滑流影响量,根据螺旋桨进距比、机翼参考面积和拉桨发动机数量,将螺旋桨拉力系数转化为全机等效拉力系数;所述全机等效拉力系数的计算公式如下:其中:为机翼参考面积;步骤s29:根据燃油消耗率修正增量、发动机增压后进气温度油耗修正因子、发动机功率、单位油耗计算发动机小时油耗;所述发动机小时油耗的计算公式如下:
。
9.进一步地,所述步骤s3,包括:步骤s31:根据迎角alfr、侧滑角betr、升降舵出舵量der、襟翼舵出舵量dfr、飞行海拔高度rwhr、下滑高度、全机等效拉力系数gctr、风洞实验所得的气动力模型,计算得到气动参数;所述气动参数,包括:全机升力系数clr、阻力系数cdr、俯仰力矩系数cmr;所述气动参数由下述插值函数得到:步骤s32:基于气动参数,结合飞行海拔高度对应的大气密度、飞行速度、机翼参考面积、纵向参考弦长,计算升力、阻力、气动俯仰力矩;所述升力的计算公式如下:所述阻力的计算公式如下:所述气动俯仰力矩的计算公式如下:。
10.进一步地,所述步骤s4,包括:步骤s41:根据着陆机场空域情况,进场下滑采用定下滑角和定表速的策略,将整个下滑阶段的轨迹分为三段,第一段的起始高度为,下滑时间为;第二段的起始高度为,下滑时间为;第三段的起始高度为,下滑时间为;步骤s42:根据下滑俯仰力矩模型计算下滑升降舵出舵量;步骤s43:根据下滑合力计算模型计算下滑迎角;步骤s44:根据下滑风门开度模型计算下滑风门开度,将下滑风门开度带入动力计算模型,得到全机等效拉力系数和螺旋桨输出拉力,将全机等效拉力系数、下滑升降舵出舵量、下滑迎角带入气动力计算模型,得到全机升力系数、阻力系数,据此计算下滑角,以及整个下滑阶段的下滑时间、水平距离和着陆接地重量。
11.进一步地,所述步骤s42,包括:步骤s421:将下滑速度带入动力计算模型得到下滑时的等效拉力系数;步骤s422:再将下滑时的等效拉力系数和下滑给定的气动数据带入气
动力计算模型,得到升降舵出舵前的气动俯仰力矩和阻力,据此计算螺旋桨输出拉力,以及螺旋桨输出拉力产生的俯仰力矩;所述螺旋桨输出拉力的计算公式如下:其中:为发动机俯仰方向的安装角;为迎角;为下滑角;所述螺旋桨输出拉力产生的俯仰力矩的计算公式如下:其中:为全机重心坐标;为螺旋桨重心坐标;为螺旋桨输出拉力机身纵向产生的分力,计算公式如下:其中:为航向的安装角;步骤s423:计算空中下滑俯仰力矩,所述空中下滑俯仰力矩为气动俯仰力矩与螺旋桨输出拉力产生的俯仰力矩的合力;所述空中下滑俯仰力矩的计算公式如下:步骤s424:根据试飞数据,下滑升降舵出舵量的范围为[,在其他气动数据已知的前提下,根据方程式在[附近的零点计算下滑升降舵出舵量。
[0012]
进一步地,所述步骤s43,包括:步骤s431:将下滑升降舵出舵量带入气动力计算模型,得到升降舵出舵后的升力和阻力,进一步求得下滑阶段的合力;所述下滑阶段的合力的计算公式如下:步骤s432:将下滑升降舵出舵量带入下滑阶段合力方程式,根据试飞数据,下滑迎角在度附近,在其他气动数据已知的前提下,根据方程式在度
附近的零点计算下滑迎角。
[0013]
进一步地,所述步骤s44,包括:步骤s441:将下滑速度带入动力计算模型,计算平衡后的螺旋桨输出拉力;步骤s442:将下滑迎角带入气动力计算模型计算固定表速下滑的升力、阻力、俯仰力矩;步骤s443:将下滑速度、下滑迎角、下滑高度、下滑风门开度带入动力计算模型,得到固定表速下滑的螺旋桨输出拉力;步骤s444:再根据螺旋桨输出拉力,计算无人机纵轴方向的拉力;所述拉力的计算公式如下:步骤s445:将下滑最大可用节气门开度,带入动力计算模型可得最大下滑拉力,据此计算无人机纵轴方向的最大拉力,当无人机阻力小于时,下滑剩余推力为,否则为0;所述最大拉力的计算公式如下:所述下滑剩余推力的计算公式如下:;步骤s446:根据步骤s441-步骤s445可得函数,对函数求零点,求得风门开度;步骤s447:根据下滑阶段发动机风门开度判断逻辑设定风门开度,并将风门开度带入发动机数据模型,得到全机等效拉力系数和螺旋桨输出拉力,将全机等效拉力系数带入气动力数据模型得到全机升力系数、阻力系数,据此可计算下滑角;所述下滑角的计算公式如下:其中:为性质角,即为升力和阻力的合力与升力之间的夹角,计算公式如下:步骤s448:经过下滑时间之后,可得每阶段的当前高度、下滑水平距离、
当前飞机重量,将三个阶段累加可得到整个下滑阶段的水平距离、下滑时间、着陆接地重量;所述当前高度的计算公式如下:所述下滑水平距离的计算公式如下:所述当前飞机重量的计算公式如下:所述水平距离的计算公式如下:所述下滑时间的计算公式如下:。
[0014]
进一步地,所述步骤s5,包括:步骤s51:对着陆接地进行受力分析,根据着陆合力模型和接地俯仰力矩模型计算着陆接地速度;步骤s52:将着陆滑跑阶段分为两个子阶段:着陆滑跑第一阶段和着陆滑跑第二阶段,分别对应起刹前滑跑和起刹后滑跑;步骤s53:根据起刹前滑跑减速模型计算着陆滑跑第一阶段滑跑时间和距离,具体为通过ode45函数求解出滑跑时间与滑跑距离、滑跑速度所对应的向量组,根据起刹速度,在向量组中找到对应的着陆滑跑第一阶段着陆滑跑时间和着陆滑跑距离;步骤s54:根据起刹后滑跑减速模型计算着陆滑跑第二阶段的滑跑时间和距离,同理,通过ode45函数求得向量组,根据停止速度,在向量组中找到对应的着陆滑跑第二阶段着陆滑跑时间和着陆滑跑距离;步骤s55:根据着陆滑跑第一阶段着陆滑跑时间和着陆滑跑距离、着陆滑跑第二阶段着陆滑跑时间和着陆滑跑距离,计算整个着陆滑跑阶段的着陆滑跑时间和着陆滑跑距离。
[0015]
进一步地,所述步骤s51,包括:步骤s511:对无人机着陆进行受力分析,得到着陆合力;所述着陆合力的计算公式如下:的计算公式如下:
步骤s512:根据试飞数据,无人机的主轮接地速度为,在其他气动数据已知的前提下,根据函数在附近的零点计算主轮接地速度;步骤s513:将主轮接地速度带入动力计算模型得到着陆时的等效拉力系数;步骤s514:再将着陆时的等效拉力系数和着陆给定的气动数据带入气动力计算模型,得到俯仰力矩,再由全机重心坐标、发动机重心坐标,计算发动机推力产生的俯仰力矩,进而计算接地俯仰力矩;所述发动机推力产生的俯仰力矩的计算公式如下:所述接地俯仰力矩的计算公式如下:步骤s515:根据试飞数据,着陆配平舵面在度附近,在其他气动数据已知的前提下,根据函数在度附近的零点计算着陆配平舵面,将带入着陆合力公式,根据试飞数据,三轮接地着陆速度在附近,在其他气动数据已知的前提下,根据函数在附近的零点计算三轮接地着陆速度。
[0016]
与现有的技术相比本发明的有益效果是:一种螺旋桨无人机自主着陆避障能力分析方法,通用性强,符合ccar23和ccar25规定的多种螺旋桨飞机,也符合着陆能力更弱的低速螺旋桨无人机,经过螺旋桨无人机实际飞行验证,数据准确可用。
附图说明
[0017]
图1为一种螺旋桨无人机自主着陆避障能力分析方法流程图;图2为步骤s1的详细流程图;图3为步骤s2的详细流程图;图4为步骤s3的详细流程图;图5为步骤s4的详细流程图;图6为步骤s5的详细流程图;图7为通航机场低速螺旋桨无人机短跑道着陆避障场景示意图;图8为着陆下滑受力分析图;图9为着陆接地受力分析图;图10为实施例二中螺旋桨无人机不同重量着陆下滑航迹示意图。
具体实施方式
[0018]
需要说明的是,术语“第一”和“第二”等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何
这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
[0019]
下面结合实施例对本发明的特征和性能作进一步的详细描述。
[0020]
实施例一在通航机场着陆时,低速螺旋桨无人机由于自身着陆能力较弱,会受到机场跑道长度、升降带、端净空等条件和状况的限制,需要准确分析与机场跑道长度、升降带、端净空等条件和状况的适用性,针对自主着陆逻辑,明确着陆使用能力和限制条件。
[0021]
ccar23对于正常类、实用类和特技类最大重量超过2722公斤的活塞发动机飞机,有参考着陆进场速度;ccar23和ccar25都规定对于着陆,必须在运行限制内、标准温度下的每一重量和高度,确定飞机从高于着陆表面15米的一点到飞机着陆并完全停止所需的水平距离;但规章并没有明确说明具体计算和分析方法,尤其是对于无人机,更加需要一种明确的方法来分析着陆性能,设计自主着陆逻辑。
[0022]
因此,本实施例针对于上述问题,提出了一种螺旋桨无人机自主着陆避障能力分析方法,该方法按照无人机正常自主着陆过程的几个重要阶段——着陆下滑、接地着陆、地面滑跑,对气动力和螺旋桨拉力状态进行连续变换,对关联的重要性能数据进行连续解算,包括:计算着陆下滑速度:根据机场净空区情况将下滑分为三段,在中间下滑高度之上实行陡下滑,到达中间下滑高度实行浅下滑,根据重量和试飞数据设定下滑速度。
[0023]
计算着陆下滑航迹:无人机进入自主航路着陆滑跑前所经历的水平距离和时间,以及对应着陆下滑航迹等。
[0024]
计算着陆速度:主轮接地速度和三轮接地着陆速度。
[0025]
计算着陆滑跑距离:在螺旋桨和发动机着陆状态作用下,从三轮接地着陆速度减速到0所经历的距离和时间。
[0026]
计算着陆时间和距离:下滑着陆过程和接地减速滑跑所经历的总时间以及总水平距离。
[0027]
实现无人机自主着陆避障能力分析,同时通用性强,符合ccar23和ccar25规定的多种螺旋桨飞机,也符合着陆能力更弱的低速螺旋桨无人机,经过螺旋桨无人机实际飞行验证,数据准确可用。
[0028]
具体的,请参阅图1,一种螺旋桨无人机自主着陆避障能力分析方法,包括:步骤s1:通过无人机着陆重量连续解算下滑真速;步骤s2:建立动力计算模型;即根据飞行高度、飞行速度和发动机风门开度计算螺旋桨拉力、全机等效拉力系数、小时油耗;步骤s3:建立气动力计算模型;即根据全机等效拉力系数、襟翼舵出舵量等参数在气动数据库中插值得到全机升力系数、阻力系数、俯仰力矩系数,并根据速度等参数计算升力、阻力、俯仰力矩;步骤s4:连续解算进场下滑过程;利用下滑真速,在下滑俯仰力矩模型、下滑合力
计算模型、下滑风门开度模型的基础上,结合动力计算模型和气动力计算模型,计算下滑角,以及整个下滑阶段的下滑时间、水平距离和着陆接地重量;其中,随着高度降低,每段的下滑角逐渐减小,着陆下滑受力分析如图8所示;步骤s5:连续解算着陆滑跑过程;对着陆接地进行受力分析,并结合着陆合力模型、接地俯仰力矩模型、起刹前滑跑减速模型和起刹后滑跑减速模型,计算滑跑总时间和滑跑总距离;其中,着陆接地受力分析如图9所示;步骤s6:基于步骤s4得到的整个下滑阶段的时间、水平距离和步骤s5得到的滑跑总时间和滑跑总距离,计算得到整个着陆过程的所需水平距离和所需时间。
[0029]
如图2所示,在本实施例中,具体的,所述步骤s1,包括:步骤s11:已知无人机着陆重量,根据试飞数据建立的海平面标准大气压下着陆重量与引导下滑表速对应关系(根据自主预置的着陆重量-下滑表速对应模型),对无人机着陆重量进行插值得到引导下滑表速;步骤s12:根据下滑高度判定下滑方式;当下滑高度大于中间下滑点高度时,进行陡下滑,陡下滑表速仍为;当下滑高度小于中间下滑点高度时,进行浅下滑,浅下滑表速根据民用运输机场标准或军用机场标准进行插值换算,得到浅下滑表速;步骤s13:将判定后的下滑表速定义为;即为实际下滑表速;步骤s14:根据海平面标准大气密度和飞行海拔高度对应的大气密度将判定后的下滑表速转换为下滑真速;即为实际下滑真速;所述下滑真速的计算公式如下:其中:为飞行海拔高度。
[0030]
如图3所示,在本实施例中,具体的,所述步骤s2,包括:步骤s21:将无人机发动机的风门开度(油门)设定为,根据发动机台架试验建立的发动机风门开度与转速对应关系(风门开度-转速对应模型),对风门开度进行插值得到插值发动机转速;步骤s22:选定发动机转速-功率模型,将插值发动机转速rpmr带入选定的发动机转速-功率模型,得到发动机功率;步骤s23:根据无人机螺旋桨-发动机匹配关系,计算发动机输出至螺旋桨做功功率;所述发动机输出至螺旋桨做功功率的计算公式如下:
其中:为由试飞数据分析得到的发动机功率修正系数;为发动机进气道总压恢复系数;为单台发动机提取功率;步骤s24:根据发动机-螺旋桨传动比模型确定传动比;步骤s25:计算螺旋桨功率系数和螺旋桨进距比;所述螺旋桨功率系数和螺旋桨进距比的计算公式如下:的计算公式如下:其中:为螺旋桨直径;为飞行速度;步骤s26:根据螺旋桨数据库对螺旋桨功率系数和螺旋桨进距比进行插值计算得到螺旋桨拉力系数;步骤s27:根据螺旋桨拉力效率修正模型(修正因子)和试飞数据得到的螺旋桨装机拉力效率,计算修正螺旋桨装机拉力效率,并计算螺旋桨输出拉力;所述修正螺旋桨装机拉力效率的计算公式如下:其中:为修正因子;所述螺旋桨输出拉力的计算公式如下:其中:为重力加速度;步骤s28:考虑拉桨滑流影响量,根据螺旋桨进距比、机翼参考面积和拉桨发动机数量,将螺旋桨拉力系数转化为全机等效拉力系数;所述全机等效拉力系数的计算公式如下:
其中:为机翼参考面积;步骤s29:根据燃油消耗率修正增量、发动机增压后进气温度油耗修正因子、发动机功率、单位油耗计算发动机小时油耗;所述发动机小时油耗的计算公式如下:。
[0031]
如图4所示,在本实施例中,具体的,所述步骤s3,包括:步骤s31:根据迎角alfr、侧滑角betr、升降舵出舵量der、襟翼舵出舵量dfr、飞行海拔高度rwhr、下滑高度、全机等效拉力系数gctr、风洞实验所得的气动力模型(根据风洞实验数据进行插值计算得到),计算得到气动参数;所述气动参数,包括:全机升力系数clr、阻力系数cdr、俯仰力矩系数cmr;所述气动参数由下述插值函数得到:步骤s32:基于气动参数,结合飞行海拔高度对应的大气密度、飞行速度、机翼参考面积、纵向参考弦长,计算升力、阻力、气动俯仰力矩;所述升力的计算公式如下:所述阻力的计算公式如下:所述气动俯仰力矩的计算公式如下:。
[0032]
如图5所示,在本实施例中,具体的,所述步骤s4,包括:步骤s41:根据着陆机场空域情况,进场下滑采用定下滑角和定表速的策略,将整个下滑阶段的轨迹分为三段,第一段的起始高度为,下滑时间为;第二段的起始高度为,下滑时间为;第三段的起始高度为,下滑时间为;步骤s42:根据下滑俯仰力矩模型计算下滑升降舵出舵量;步骤s43:根据下滑合力计算模型计算下滑迎角;步骤s44:根据下滑风门开度模型计算下滑风门开度,将下滑风门开度等参数带入
动力计算模型,得到全机等效拉力系数和螺旋桨输出拉力,将全机等效拉力系数、下滑升降舵出舵量、下滑迎角等参数带入气动力计算模型,得到全机升力系数、阻力系数,据此计算下滑角,以及整个下滑阶段的下滑时间、水平距离和着陆接地重量。
[0033]
在本实施例中,具体的,所述步骤s42,包括:步骤s421:将下滑速度带入动力计算模型得到下滑时的等效拉力系数;步骤s422:再将下滑时的等效拉力系数和下滑给定的气动数据带入气动力计算模型,得到升降舵出舵前的气动俯仰力矩和阻力,据此计算螺旋桨输出拉力,以及螺旋桨输出拉力产生的俯仰力矩;所述螺旋桨输出拉力的计算公式如下:其中:为发动机俯仰方向的安装角;为迎角;为下滑角;所述螺旋桨输出拉力产生的俯仰力矩的计算公式如下:其中:为全机重心坐标;为螺旋桨重心坐标;为螺旋桨输出拉力机身纵向产生的分力,计算公式如下:其中:为航向的安装角;步骤s423:计算空中下滑俯仰力矩,所述空中下滑俯仰力矩为气动俯仰力矩与螺旋桨输出拉力产生的俯仰力矩的合力;所述空中下滑俯仰力矩的计算公式如下:步骤s424:根据试飞数据,下滑升降舵出舵量的范围为[,在其他气动数据已知的前提下,根据方程式在[附近的零点计算下滑升降舵出舵量。
[0034]
在本实施例中,具体的,所述步骤s43,包括:
步骤s431:将下滑升降舵出舵量带入气动力计算模型,得到升降舵出舵后的升力和阻力,进一步求得下滑阶段的合力;所述下滑阶段的合力的计算公式如下:步骤s432:将下滑升降舵出舵量带入下滑阶段合力方程式,根据试飞数据,下滑迎角在度附近,在其他气动数据已知的前提下,根据方程式在度附近的零点计算下滑迎角。
[0035]
在本实施例中,具体的,所述步骤s44,包括:步骤s441:将下滑速度带入动力计算模型,计算平衡后的螺旋桨输出拉力;步骤s442:将下滑迎角带入气动力计算模型计算固定表速下滑的升力、阻力、俯仰力矩;步骤s443:将下滑速度、下滑迎角、下滑高度、下滑风门开度带入动力计算模型,得到固定表速下滑的螺旋桨输出拉力;步骤s444:再根据螺旋桨输出拉力,计算无人机纵轴方向的拉力;所述拉力的计算公式如下:步骤s445:将下滑最大可用节气门开度,带入动力计算模型可得最大下滑拉力,据此计算无人机纵轴方向的最大拉力,当无人机阻力小于时,下滑剩余推力为,否则为0;所述最大拉力的计算公式如下:所述下滑剩余推力的计算公式如下:;步骤s446:根据步骤s441-步骤s445可得函数,对函数求零点,求得风门开度;步骤s447:根据下滑阶段发动机风门开度判断逻辑设定风门开度,并将风门开度带入发动机数据模型,得到全机等效拉力系数和螺旋桨输出拉力,将全机等效拉力系数带入气动力数据模型得到全机升力系数、阻力系数,据此可计算下滑角;所述下滑角的计算公式如下:
其中:为性质角,即为升力和阻力的合力与升力之间的夹角,计算公式如下:步骤s448:经过下滑时间之后,可得每阶段的当前高度、下滑水平距离、当前飞机重量,将三个阶段累加可得到整个下滑阶段的水平距离、下滑时间、着陆接地重量;所述当前高度的计算公式如下:所述下滑水平距离的计算公式如下:所述当前飞机重量的计算公式如下:所述水平距离的计算公式如下:所述下滑时间的计算公式如下:。
[0036]
如图6所示,在本实施例中,具体的,所述步骤s5,包括:步骤s51:对着陆接地进行受力分析,根据着陆合力模型和接地俯仰力矩模型计算着陆接地速度;步骤s52:将着陆滑跑阶段分为两个子阶段:着陆滑跑第一阶段和着陆滑跑第二阶段,分别对应起刹前滑跑和起刹后滑跑;步骤s53:根据起刹前滑跑减速模型计算着陆滑跑第一阶段滑跑时间和距离,具体为通过ode45函数求解出滑跑时间与滑跑距离、滑跑速度所对应的向量组,根据起刹速度,在向量组中找到对应的着陆滑跑第一阶段着陆滑跑时间和着陆滑跑距离;步骤s54:根据起刹后滑跑减速模型计算着陆滑跑第二阶段的滑跑时间和距离,同理,通过ode45函数求得向量组,根据停止速度,在向量组中找到对应的着陆滑跑第二阶段着陆滑跑时间和着陆滑跑距离;步骤s55:根据着陆滑跑第一阶段着陆滑跑时间和着陆滑跑距离、着陆滑跑第二阶段着陆滑跑时间和着陆滑跑距离,计算整个着陆滑跑阶段的着陆滑跑时间和着陆滑跑距离。
[0037]
在本实施例中,具体的,所述步骤s51,包括:步骤s511:对无人机着陆进行受力分析,得到着陆合力;所述着陆合力的计算公式如下:的计算公式如下:步骤s512:根据试飞数据,无人机的主轮接地速度为,在其他气动数据已知的前提下,根据函数在附近的零点计算主轮接地速度;步骤s513:将主轮接地速度带入动力计算模型得到着陆时的等效拉力系数;步骤s514:再将着陆时的等效拉力系数和着陆给定的气动数据带入气动力计算模型,得到俯仰力矩,再由全机重心坐标、发动机重心坐标,计算发动机推力产生的俯仰力矩,进而计算接地俯仰力矩;所述发动机推力产生的俯仰力矩的计算公式如下:所述接地俯仰力矩的计算公式如下:步骤s515:根据试飞数据,着陆配平舵面在度附近,在其他气动数据已知的前提下,根据函数在度附近的零点计算着陆配平舵面,将带入着陆合力公式,根据试飞数据,三轮接地着陆速度在附近,在其他气动数据已知的前提下,根据函数在附近的零点计算三轮接地着陆速度。
[0038]
在本实施例中,具体的,所述步骤s53,包括:步骤s531:根据三轮接地着陆速度以及试飞数据得到的起刹速度与接地速度之比,计算起刹速度;步骤s532:在达到起刹速度前根据起刹前滑跑减速模型,计算着陆滑跑第一阶段着陆滑跑时间和着陆滑跑距离;所述起刹前滑跑减速模型,包括:根据机场跑道坡度、跑道滚动摩擦系数,计算反支力和着陆滑跑加速度;所述反支力的计算公式如下:所述着陆滑跑加速度的计算公式如下:
设为第一阶段着陆滑跑水平距离,为第一阶段滑跑速度;令,根据以上表达式可得到函数关系;由加速度对时间积分为速度,速度对时间积分为距离,将展开为:根据y的初值],为着陆滑跑第一阶段滑跑水平距离初值,为着陆滑跑第一阶段滑跑速度初值,可通过积分、得到时间点t的列向量和解数组y,解算函数为mtalab中的ode45函数,y中的每一行都与t的相应行中返回的时间相对应,y的第一列与滑跑水平距离相对应,第二列与滑跑速度相对应,其中为第一阶段预估滑跑时间。
[0039]
当与相等时,从时间点t的列向量组中找出对应的时间,可得着陆第一阶段滑跑时间,同时在y向量组中找出与相对应的滑跑距离,可得着陆第一阶段滑跑距离。
[0040]
在本实施例中,具体的,所述步骤s54,包括:由于地面摩擦力,当无人机滑跑速度达到起刹速度时,进入起刹后滑跑阶段直至速度为0;起刹后滑跑阶段的反支力同起刹前滑跑阶段,而着陆滑跑减速会根据等效刹车摩擦阻力系数发生改变;将着陆接地重量带入刹车摩擦阻力系数模型插值计算等效刹车摩擦阻力系数(刹车摩擦阻力系数模型由试飞数据建立),进而建立第二阶段滑跑减速模型:其中:为第二阶段滑跑水平距离,为第二阶段滑跑速度;令,根据以上表达式可得到函数关系。
[0041]
同理,将展开为:根据y的初值],为着陆滑跑第二阶段滑跑水平距离初值,为着陆滑跑第二阶段滑跑速度初值,可通过积分、得到时间点t的列向量和解数组y,解算函数为mtalab中的ode45函数,y中的每一行都与t的相应行中返回的时间相对应,y的第一列与滑跑水平距离相对应,第二列与滑跑速度相对应,其中为第二阶段预估滑跑时间。
[0042]
当与停止速度0相等时,从时间点t的列向量组中找出对应的时间,可得着陆第二阶段滑跑时间,同时在y向量组中找出与0相对应的滑跑距离,可得着陆第二阶段滑跑距离。
[0043]
在本实施例中,具体的,所述步骤s55,包括:所述整个着陆滑跑阶段的着陆滑跑时间采用如下公式计算:所述整个着陆滑跑阶段的着陆滑跑距离采用如下公式计算:实施例二实施例二基于实施例一提出的一种螺旋桨无人机自主着陆避障能力分析方法,对不同着陆重量螺旋桨无人机进行着陆性能分析,分析结果见表1,着陆下滑航迹如图10所示。
[0044]
表1 螺旋桨无人机不同着陆重量着陆性能数据
着陆接地重量(kg)下滑水平距离(m)下滑时间(s)接地表速(km/h)滑跑距离(m)滑跑时间(s)着陆距离(m)着陆时间(s)重量一11952814659826179354重量二11682615466027182853重量三11762516172529190154
重量一为最小着陆接地重量,重量二在重量一的基础上加250kg,重量三在重量一的基础上加500kg。验证结果与试飞情况吻合,可通过本方法对不同通航机场进行螺旋桨无人机着陆避障能力分析。
[0045]
以上所述实施例仅表达了本技术的具体实施方式,其描述较为具体和详细,但并不能因此而理解为对本技术保护范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本技术技术方案构思的前提下,还可以做出若干变形和改进,这些都属于本技术的保护范围。
[0046]
提供本背景技术部分是为了大体上呈现本发明的上下文,当前所署名的发明人的工作、在本背景技术部分中所描述的程度上的工作以及本部分描述在申请时尚不构成现有技术的方面,既非明示地也非暗示地被承认是本发明的现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1