一种机器人的巡检方法、装置、存储介质及机器人与流程
本技术涉及智能家居领域,特别涉及一种机器人的巡检方法、装置、存储介质及机器人。
背景技术:
1、随着技术的发展,工业场景的机器人越来越多,但是家居机器人还很稀少,现有的家庭场景机器人主要集中在扫地拖地机器人方向,家居巡检机器人还相对空白。
2、因此,为提高家庭生活的安全性,提供一种机器人的巡检方法以控制机器人对家庭环境进行安全性检测是十分必要的。
技术实现思路
1、本技术的目的是提供一种机器人的巡检方法、装置、存储介质及机器人,能根据通过对巡检任务的配置可以自定义机器人需要巡检的目标区域和目标时间,进而根据巡检任务和地图对各个巡检区域进行巡检,以确定各个巡检区域中是否存在异常情况,提高了机器人的智能性,优化了用户使用机器人时的体验。
2、为解决上述技术问题,本技术提供了一种机器人的巡检方法,包括:
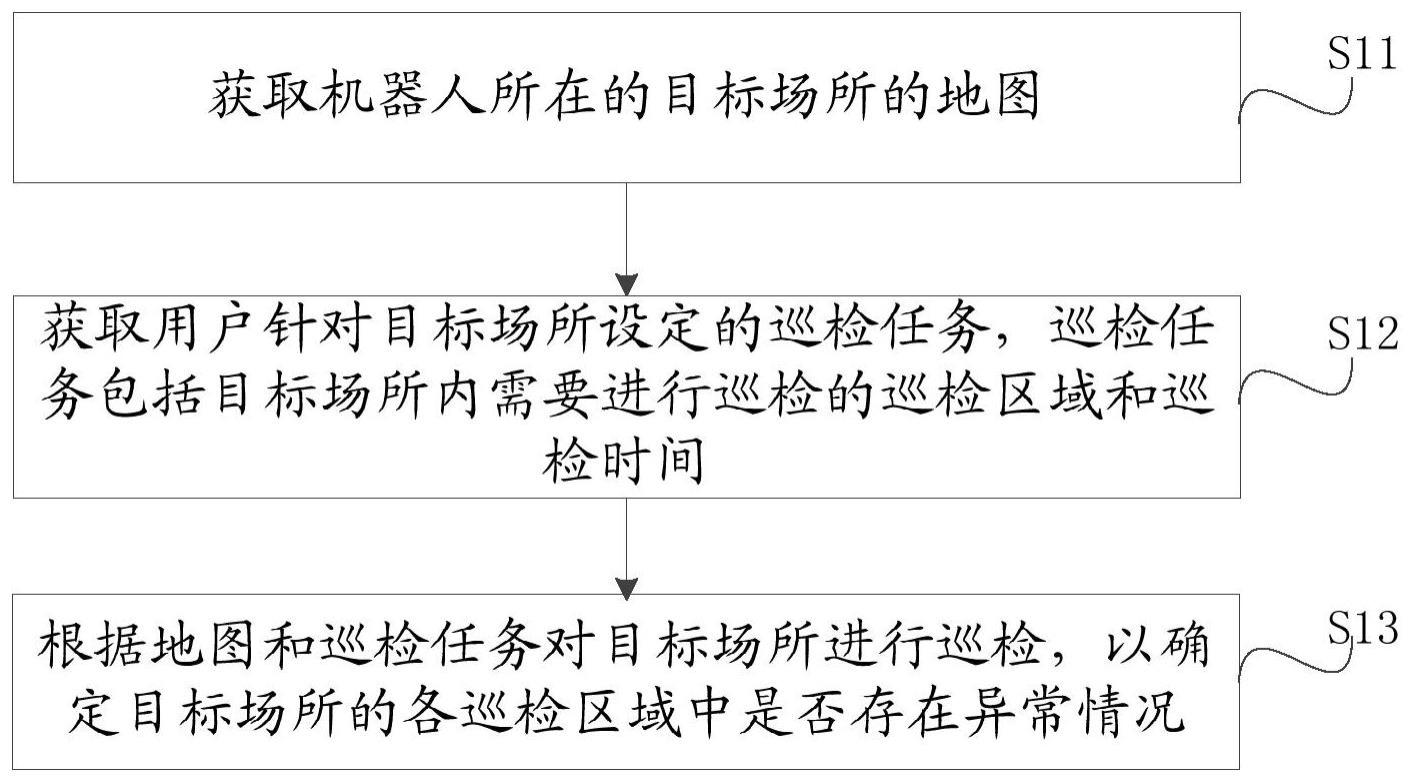
3、获取机器人所在的目标场所的地图;
4、获取用户针对所述目标场所设定的巡检任务,所述巡检任务包括所述目标场所内需要进行巡检的巡检区域和巡检时间;
5、根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况。
6、优选地,在所述根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况之前,还包括:
7、每隔预设时间段,判断当前是否满足自动巡检条件;
8、当满足自动巡检条件时,根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况。
9、优选地,所述巡检任务中还包括禁止时间段,则所述判断当前是否满足自动巡检条件包括:
10、判断当前时间是否在用户设定的禁止时间段内;
11、若在所述禁止时间段内,则判定不满足所述自动巡检条件,否则,判定满足所述自动巡检条件。
12、优选地,所述判断当前是否满足自动巡检条件包括:
13、对所述地图进行初始化,并判断初始化操作是否成功;
14、若成功,则判定满足所述自动巡检条件;
15、若失败,则判定不满足所述自动巡检条件,并重新获取机器人所在的目标场所的地图。
16、优选地,所述判断当前是否满足自动巡检条件包括:
17、判断机器人当前的导航状态是否处于空闲状态;
18、若处于空闲状态,则判定满足所述自动巡检条件,否则,判定机器人当前存在未执行完的巡检任务,则不满足所述自动巡检条件。
19、优选地,所述判断当前是否满足自动巡检条件包括:
20、判断机器人的当前电量是否低于预设电量;
21、若低于所述预设电量,则判定不满足所述自动巡检条件,否则,判定满足自动巡检条件。
22、优选地,所述根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况,包括:
23、获取所述地图中的分区列表,每个分区对应一个巡检区域;
24、根据所述巡检任务中设定的巡检区域和所述地图中的分区列表,确定机器人的巡检路线;
25、控制所述机器人按照所述巡检路线依次对所述目标场所中的各巡检区域进行巡检,以确定各巡检区域中是否存在异常情况。
26、优选地,所述机器人设置有用于获取红外照片与温度信息的红外摄像装置,以及用于获取可见光照片的可见光摄像装置;
27、则所述根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况,包括:
28、在机器人根据所述地图和所述巡检任务对所述目标场所进行巡检的过程中,使用所述红外摄像装置确定目标场所的各巡检区域中是否存在异常情况;
29、若存在异常情况,则使用所述红外摄像装置和/或可见光摄像装置对所述异常情况进行拍照,并将照片及判定结果上传。
30、优选地,所述使用所述红外摄像装置确定目标场所的各巡检区域中是否存在异常情况,包括:
31、使用所述红外摄像装置获取巡检区域的温度信息,并根据所述温度信息确定是否存在温度高于第一预设温度的异常区域;
32、若存在温度高于所述第一预设温度的异常区域,则判定温度高于所述第一预设温度的异常区域存在着火风险,控制所述红外摄像装置和/或所述可见光摄像装置对存在着火风险的异常区域进行拍照,并将照片及判定结果上传。
33、优选地,所述使用所述红外摄像装置确定目标场所的各巡检区域中是否存在异常情况,包括:
34、使用所述红外摄像装置获取巡检区域中的人体信息,根据所述人体信息确定人体的温度信息;
35、根据所述人体的温度信息判断人体温度是否高于第二预设温度;
36、若人体温度高于所述第二预设温度,则判定人体存在发热情况,控制所述红外摄像装置和/或所述可见光摄像装置对存在发热情况的人体进行拍照,并将照片及判定结果上传。
37、优选地,所述使用所述红外摄像装置确定目标场所的各巡检区域中是否存在异常情况,包括:
38、使用所述红外摄像装置在当前巡检区域中进行信息采集,并根据所述红外摄像装置的采集信息确定人体姿态;
39、判断所述人体姿态是否为跌倒状态;
40、若为跌倒状态,则控制所述红外摄像装置和/或所述可见光摄像装置对所述异常情况进行拍照,并将照片及判定结果上传。
41、优选地,所述机器人设置有用于获取红外照片与温度信息的红外摄像装置,以及用于获取可见光照片的可见光摄像装置,当所述巡检任务中还设置有隐私时间和隐私区域时;
42、所述根据所述地图和所述巡检任务对所述目标场所进行巡检,以确定所述目标场所的各巡检区域中是否存在异常情况,包括:
43、若巡检至所述隐私区域,和/或,在所述隐私时间巡检时,关闭所述可见光摄像装置,使用所述红外摄像装置确定所述目标场所的各巡检区域中是否存在异常情况;
44、在判定存在所述异常情况时,使用所述红外摄像装置获取所述异常情况的红外照片,并将所述红外照片及判定结果上传。
45、为解决上述技术问题,本技术还提供了一种机器人的巡检装置,包括:
46、存储器,用于存储计算机程序;
47、处理器,用于在存储计算机程序时,实现如上述所述的机器人的巡检方法的步骤。
48、为解决上述技术问题,本技术还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现上述所述的机器人的巡检方法的步骤。
49、为解决上述技术问题,本技术还提供了一种机器人,包括上述所述的机器人的巡检装置。
50、本技术提供了一种机器人的巡检方法、装置、存储介质及机器人,涉及智能家居领域。该方案中,获取机器人所在的目标场所的地图;获取用户针对目标场所设定的巡检任务,巡检任务包括目标场所内需要进行巡检的巡检区域和巡检时间;根据地图和巡检任务对目标场所进行巡检,以确定目标场所的各巡检区域中是否存在异常情况。本技术中能根据通过对巡检任务的配置可以自定义机器人需要巡检的目标区域和目标时间,进而根据巡检任务和地图对各个巡检区域进行巡检,以确定各个巡检区域中是否存在异常情况,提高了机器人的智能性,优化了用户使用机器人时的体验。
- 还没有人留言评论。精彩留言会获得点赞!