一种基于旋翼的自平衡无人驾驶自行车
本发明涉及交通领域,尤其涉及一种基于旋翼的自平衡无人驾驶自行车。
背景技术:
1、自行车是一种常用的交通工具,具有机构简单、方便灵活、无噪声、售价低廉、节能环保等优点,在节能减排、低碳出行成为全民共识的当下有着不可替代的重要地位。随着人们对智能交通工具和无人驾驶技术的关注度持续提高,无人驾驶自行车在这一智能交通工具概念的基础上有了初步的发展。而无人驾驶自行车有望在灾难救援、森林作业、特殊物流运输中得到应用,前景开阔。
2、目前,无人驾驶自行车的研究主要围绕动力学建模和提出新的控制算法这两方面进行,对其研究大都停留在理论探讨和初步试验的阶段。现有的应用于摩托车或电动自行车的平衡系统本质上是独轮车平衡系统(即倒立摆平衡系统)和两足平衡系统的叠加,这类方法应用后将限制自行车的前把灵活性,减少一个维度的自由度。此外,现有自行车自平衡方案的尝试大多需要对自行车进行复杂的机械改造,实用性和灵活性较低。
3、自行车复杂的动力学特征使得自行车的多状态自平衡还存在许多棘手问题,其中静止状态或低速行驶下自行车的自平衡问题始终是限制无人驾驶自行车发展的关键点。
技术实现思路
1、本发明的目的在于针对现有技术的不足,提供一种基于旋翼的自平衡无人驾驶自行车。
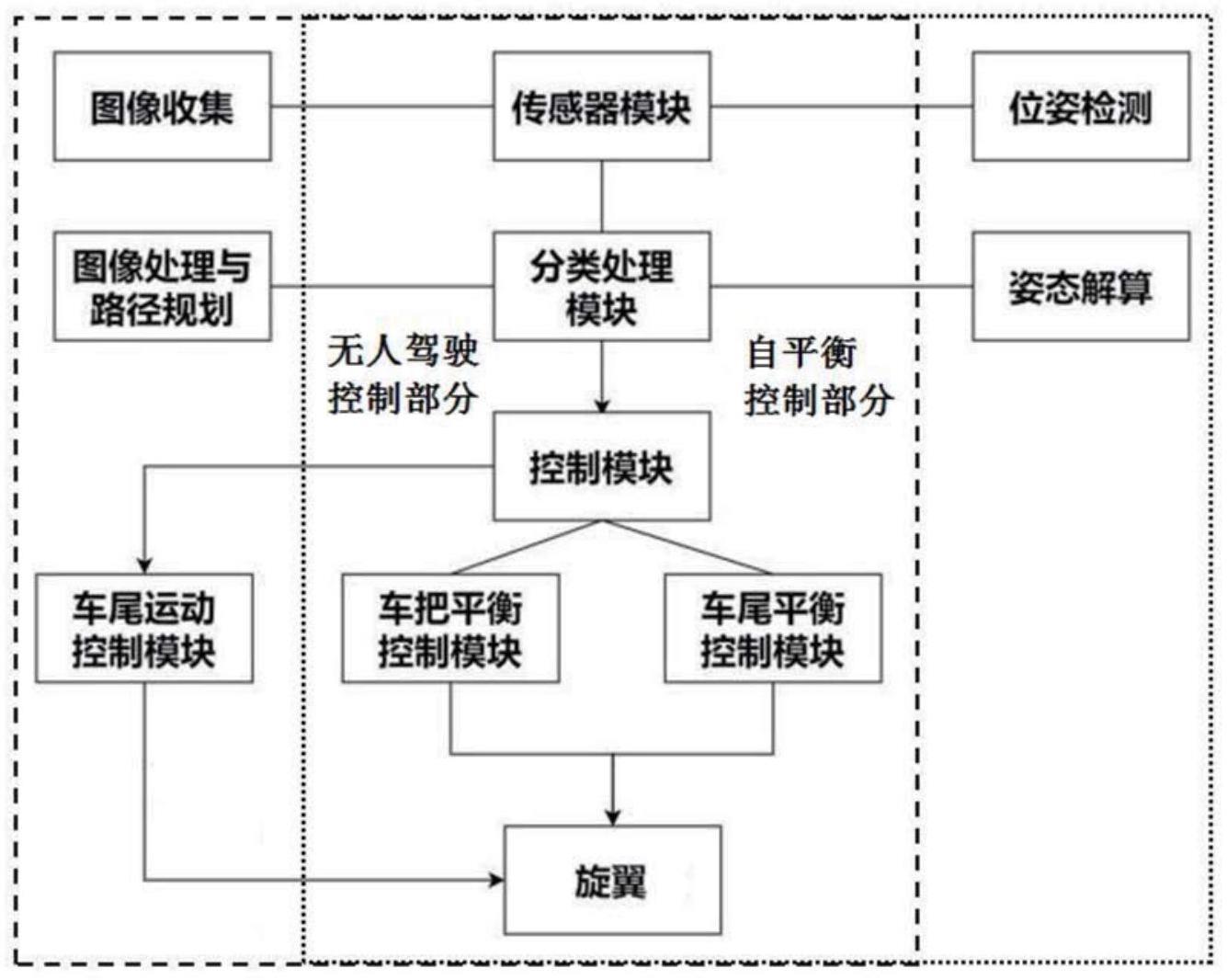
2、本发明的目的是通过以下技术方案来实现的:一种基于旋翼的自平衡无人驾驶自行车,包括传感器模块、车把平衡控制模块、车尾平衡控制模块、车尾运动控制模块、分类处理模块和供电装置;
3、所述传感器模块用于测量自行车平衡变量和运动路径变量,所述自行车平衡变量包括自行车车把偏转角度α、自行车车体偏转角度β和后轮转速n,所述运动路径变量包括目标方向和障碍物方位;
4、所述车把平衡控制模块安装于自行车车把,通过调节车把左右两旋翼速度与转向实现车把偏转角度α的调节;
5、所述车尾平衡控制模块安装于自行车车体后部,通过调节车尾旋翼速度与转向,与车把平衡控制模块共同完成自行车车体偏转角度β的调节;
6、所述车尾运动控制模块安装于自行车后部,通过调节车尾旋翼叶片倾角,在不改变车尾旋翼转速的情况下调节车尾旋翼产生的推力,进而调整后轮转速n,控制自行车以预期速度前进;
7、所述分类处理模块用于处理自行车平衡变量和运动路径变量信息,完成实时路径规划与旋翼工作参数计算,发送指令给车把平衡控制模块、车尾平衡控制模块、车尾运动控制模块。
8、所述供电模块安装于自行车中部,与车把旋翼、车尾悬翼、单片机相连接,实现供电驱动。
9、进一步地,所述车把平衡控制模块为安装于车把两端上的旋翼及其驱动机构;主体为两个水平方向旋转的旋翼,两旋翼不同旋转状态的组合能够产生向上升力fz和反扭矩tz;非平衡状态下,反扭矩tz变化用于平衡自行车偏航角yaw方向的倾倒角速度所产生的力矩,平衡状态下tz变化用于运动中转向;同时,旋翼旋转产生的升力力矩mxy参与车体侧向倾倒情况的平衡过程;等式关系如下:
10、fz=ct1(w12+w22)
11、tz=cm1(w12±w22)
12、mxy=dct1(w12-w22)
13、其中,d为车把左端或右端旋翼转轴到车把中轴线的距离,w1表示车把左旋翼角速度,w2表示右旋翼角速度,ct1、cm1为常数。
14、进一步地,所述车尾平衡控制模块为安装于自行车后轮上方的旋翼及其驱动机构;主体为一个垂直车身方向的旋转的旋翼,旋翼旋转产生向前推力fy和反扭矩tx;非平衡状态下,反扭矩tx变化用于平衡自行车横滚角roll方向的倾倒角速度所产生的力矩,平衡状态下推力fy用于全车驱动;等式关系如下:
15、fy=ct2w32
16、tx=cm2w32
17、其中,w3表示车尾旋翼角速度,ct2、cm2为常数。
18、进一步地,车尾运动控制模块为旋翼叶片倾角调节装置,由于车尾旋翼叶片转速同时影响前进速度与自行车平衡状态,在自行车平衡后应减少旋翼叶片转速变化对自行车平衡的影响,静止平衡时需减少向前推力作用;所述车尾运动控制模块能够通过改变旋翼叶片倾角来改变向前推力大小,平衡状态下调节自行车速度,非平衡状态下辅助自行车平衡,当叶片倾角为负时,产生反向拉力,自行车前轮视为从动轮,限制前轮相对于车把的自由度,有利于整车平衡。
19、进一步地,分类处理模块为单片机,一方面根据传感器模块中的位姿传感器输入的自行车车把偏转角度α、自行车车体偏转角度β,利用pid控制算法输出车把左旋翼角速度w1、车把右旋翼角速度w2、车尾旋翼角速度w3,向车把平衡控制模块或车尾平衡控制模块发对应送指令,体现为旋翼控制电机的输入pwm波和方向控制电压;根据传感器模块中的速度传感器输入的后轮转速n,利用pid控制算法输出旋翼叶片倾角θ,向车尾运动控制模块发送对应指令;另一方面,根据传感器模块中的视觉传感器采集图像信息获取目标方向和障碍物方位,实时进行路径规划。
20、进一步地,所述自平衡无人驾驶自行车包含自平衡控制部分,所述自平衡控制部分包括:
21、(1)仿真建模:构建传感器模块测量的变量与车把平衡控制模块、车尾平衡控制模块和车尾运动控制模块的控制变量间的映射关系,从而实现自行车的仿真自平衡;所述的自行车变量包括自行车车把偏转角度α、自行车车体偏转角度β及它们的一次、二次导数;所述的控制变量包括车把左旋翼角速度w1、车把左旋翼角速度w2、车尾旋翼角速度w3以及它们的旋转方向;
22、(2)自动化建模:通过对仿真建模得到的仿真控制器结合自行车的真实传感器模块测量的变量与真实的控制模块的控制变量间的相关关系,实现自行车的自动化平衡控制;
23、(3)智能化建模:通过对自动化建模得到的自行车真实控制器,结合进化算法、机器学习算法或深度学习算法中的一种或多种,学习自行车在陌生或复杂环境中的控制参数ct1、cm1、ct2、cm2、j,实现在陌生环境或复杂环境中的自适应平衡。
24、进一步地,所述自平衡无人驾驶自行车包含无人驾驶控制部分,所述无人驾驶控制部分包括:利用机器学习算法,持续感应周围环境,并预测可能出现的变化,完成环境感知和定位、决策规划、执行决策三个子任务,
25、(1)环境感知和定位:采用单目摄像头监控前方的路障,采用激光雷达和超声波雷达采集距离数据并绘制出点云图,从而实现对障碍物的形状、大小、距离的描绘;利用卫星定位获取到车辆所在的具体坐标,为车辆的决策规划提供依据;
26、(2)决策规划:首先通过diikstra或rrt算法在地图基础上完成路径规划,利用深度学习lstm循环神经网络进行其他道路参与者行为预测与自身行为决策;
27、(3)执行决策:选择期望的自行车变量,实现自行车的无人驾驶控制。
28、进一步地,自平衡控制部分的自平衡自行车的理论建模过程包括:
29、建立惯性坐标系{e}与自行车坐标系{b}之间的旋转矩阵rb→e,并将姿态角转换到自行车坐标系下的角速度p、q、r:
30、
31、
32、自行车参考系{b}中,三旋翼产生力f0,在机体轴上产生的力矩t,以及陀螺力矩g:
33、
34、
35、
36、自行车坐标系转换到惯性坐标系{e}并建立平衡方程为:
37、
38、
39、其中w1表示车把左旋翼角速度,w2表示右旋翼角速度,w3表示车尾旋翼角速度,d为车把左端或右端旋翼转轴到车把中轴线的距离,ct1、ct2、cm1、cm2为常数,j1、j2分别表示车把与车尾旋翼电机转子和旋翼绕车身的总转动惯量,j表示整车绕x、y、z三轴的转动惯量矩阵,表示对β、α求一次导,表示对β、α求二次导。
40、本发明的有益效果:
41、1.本发明的无人驾驶自行车在静止时具有自平衡功能;
42、2.本发明在保留自行车车把高自由度的前提下可实现自行车在多种运动状态下,尤其是低速运行时的自平衡功能;
43、3.本发明完全基于日常通用自行车的结构基础进行零件加装,且旋翼装置相较于传统飞轮等方式更灵活轻便,具有安装方便、可拆卸等优势;
44、4.本发明基础上可进行许多深化拓展研究,如自主导航功能的优化,具有很强的功能拓展性。
- 还没有人留言评论。精彩留言会获得点赞!