一种小水线面双体船可调鳍的自动寻优控制方法与流程
本发明涉及小水线面双体船可调鳍控制方法,尤其是一种小水线面双体船可调鳍的自动寻优控制方法,可以针对小水线面双体船航行时通过可调鳍的控制,自动达到对航速以及姿态的优化控制。
背景技术:
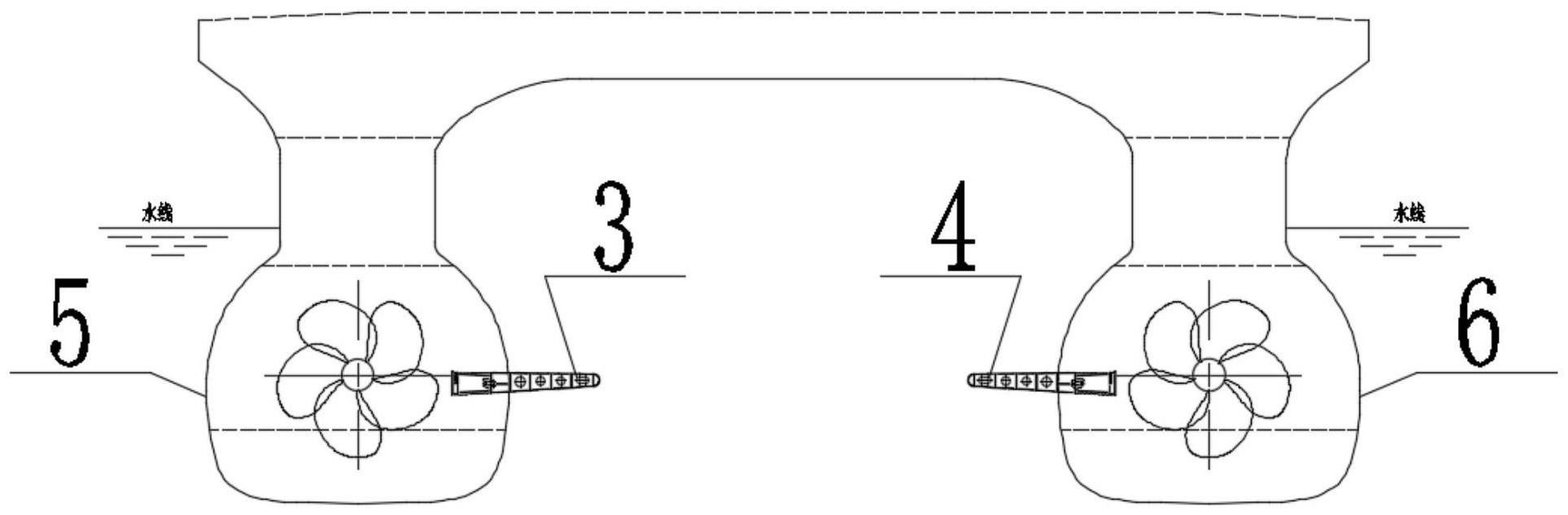
1、小水线面双体船是指一种水线面积小,且由两个潜水体和一个水上箱体,中间有两个流线型支柱连接起来的船舶,是一种具有优良耐波性的高性能船舶。随着对小水线面双体船的研究深入,该种船型越来越多被广泛应用于科考船、调查船、教学实习船等特殊船舶。
2、小水线面双体船由于较小的水线面面积,作用在下潜体上的不稳定力矩使得小水线面船在高速航行时有可能发生纵向运动失稳,对船舶安全造成极大危害。
3、为改善小水线面双体船的纵向运动稳定性,最常用的方法是在其潜体内侧前后分别布置一对可调鳍,在改善船体纵向运动稳定性的同时,还可以减小船体纵向运动响应幅值,改善航行姿态。
4、可调鳍作为小水线面双体船光滑船型的附体,在船舶航行时,通过调整可调鳍攻角,调整船舶纵向倾角。但是可调鳍攻角在调整小水线面双体船纵向倾角的同时,会给船舶带来附加阻力,增加船舶能耗,影响船舶的航速。
5、如何能在小水线面双体船可调鳍调整船舶纵向倾角的同时,优化可调鳍攻角与船舶纵向倾角、船舶航速、推进功率之间的关系,是小水线面双体船这一高性能船型需要解决的关建问题。
技术实现思路
1、本技术人针对上述现有生产技术中的缺点,提供一种小水线面双体船可调鳍的自动寻优控制方法,从而可以在小水线面双体船航行时,通过自动匹配可调鳍攻角、船舶航速、船舶纵向倾角与推进功率,自动控制船舶航行姿态,解决小水线面船型在姿态与航速、能耗之间的矛盾问题。
2、本发明所采用的技术方案如下:
3、一种小水线面双体船可调鳍的自动寻优控制方法,包括小水线面双体船,在小水线面双体船下潜体的左片体和右片体内侧位置均安装可调鳍,分别为一号可调鳍、二号可调鳍、三号可调鳍和四号可调鳍,具体的,在左片体的艏部和艉部分别安装一号可调鳍和三号可调鳍,在右片体的艏部和艉部分别安装二号可调鳍和四号可调鳍;
4、控制方法包括如下操作过程:
5、首先,根据理论分析与确定船舶纵倾角度是和船舶航行速度,并得到实船攻角组合、功率、纵倾角度、航行速度之间的对应曲线图谱;
6、当船舶纵倾角度大于0,船舶没有出现埋首现象,
7、此时,根据实船测试结果,修正理论计算,形成实船攻角组合、功率、纵倾角度、航行速度之间的对应曲线图谱,并在图谱中插值得出任意一组实船攻角组合、功率、纵倾角度、航行速度之间的组合;
8、s1:船舶根据航行工况,任务需要,给出船舶的航速控制需求;
9、s2:根据实船攻角组合、功率、纵倾角度、航行速度之间的对应曲线图谱,插值寻找设定航速下,最为节能的功率,确定攻角组合、纵倾角;
10、s3:传递至推进系统控制单元,给出推进功率;
11、s4:控制可调鳍运行,调整攻角组合至;
12、s5:船舶达到纵倾角,并达到设定航速;
13、s6;判断设定航速是否稳定;
14、s7:若航速稳定,则船舶按照恒速航行,直到航速重新变动;
15、s8:若航速不稳定,根据船舶姿态仪反馈船舶纵向倾角,判断船舶是否因外界海况变化导致船舶姿态发生变化,引起航速不稳定,如果船舶纵向倾角发生变化,实时获取船舶最新倾角;
16、s9:返回至步骤s2,根据实船攻角组合、功率、纵倾角度、航行速度之间的对应曲线图谱,插值寻找在船舶倾角情况下,达到设定航速需要的最为节能功率,确定攻角组合,控制系统按s2,直到达到设定航速并稳定下来;
17、s10:接步骤s8,若航速不稳定,根据船舶姿态仪反馈船舶纵向倾角,判断船舶是否因外界海况变化导,船舶姿态发生变化,引起航速不稳定,如果船舶纵向倾角未发生变化,报警至监测系统,提醒船员故障;
18、s11:同时,为了保证船舶安全,船舶恢复平浮姿态航行,至s12;
19、s12:接s1,如果船舶根据作业工况,海况特点,船员判断船舶需要平浮姿态航行,此时船舶纵倾角度为0°;
20、s13:船员根据作业情况,确定作业速度;
21、s14:船舶控制转至s1。
22、作为上述技术方案的进一步改进:
23、船舶出现埋首现象,该情况下的船舶功率、攻角组合不进入自动控制系统。
24、艏部的一号可调鳍和二号可调鳍为一对,同步改变攻角。
25、艉部的三号可调鳍和四号可调鳍为一对,同步改变攻角。
26、两艏部两片可调鳍的攻角和艉部两片可调鳍的攻角组成一组鳍攻角组合,可调鳍的攻角组合为包含多组鳍攻角。
27、理论分析与确定船舶纵倾角度和船舶航行速度的具体方式如下:
28、根据小水线面双体船在航行时受到的扭矩作用,确定在不同攻角、功率、航速、船舶纵倾角度之间的关系如下:
29、a1v2p[a2(α2-α1)+a3]=a4θ
30、其中,a1、a2、a3、a4为与船舶排水量、主尺度等已知参数有关的常数;
31、v是航行速度;
32、p是功率;
33、α1是艏部可调鳍攻角,α2是艉部可调鳍攻角,α1、α2共同组成实船攻角组合α;
34、θ是船舶纵倾角度;
35、通过基于上述公式的理论分析,确定小水线面双体船在不同功率p情况下,每一组鳍攻角的组合对应的船舶纵倾角度θ。
36、通过基于上述公式的理论分析,确定小水线面双体船在不同功率p情况下,每一组鳍攻角的组合对应的船舶航行速度v。
37、同时,为了保证鳍攻角组合与功率、航速、纵倾角度的关系准确性,在船舶实船航行阶段,进行如下测试:
38、(a)确定小水线面双体船在选定代表功率p组合,选定鳍攻角的组合下,船舶纵倾角度θ。
39、(b)确定小水线面双体船在选定代表功率p组合,选定鳍攻角的组合下,船舶航行速度v。
40、将实船测试的结果,校正理论分析,确定在每组鳍攻角组合下,船舶纵倾角度θ;
41、将实船测试的结果,校正理论分析,确定在每组鳍攻角组合下,船舶航行速度v。
42、本发明的有益效果如下:
43、本发明结构紧凑、合理,操作方便,通过可调鳍的设置,根据理论计算分析后,可以在小水线面双体船航行时,通过自动匹配可调鳍攻角、船舶航速、船舶纵向倾角与推进功率,自动控制船舶航行姿态,解决小水线面船型在姿态与航速、能耗之间的矛盾问题。
44、同时,本发明还具备如下优点:
45、(1)本发明可提高小水线面双体船航行稳定性,提高船舶适航性。
46、(2)本发明可实时根据船舶航行海域海况特点,实时进行姿态和航速的优化调整,自动寻优,匹配当时海况下的最优航速与功率匹配点,有效节能减排。
47、(3)本发明自动控制,同时将不利于船舶姿态的各航速下可调鳍的攻角组合筛选提供给船员,提高船舶航行安全。
- 还没有人留言评论。精彩留言会获得点赞!