移动体控制系统、移动体控制方法以及存储介质与流程
本公开涉及一种移动体控制系统、移动体控制方法以及存储介质。
背景技术:
1、在日本专利第6350767中,记载了一种利用者以及自主移动体所利用的升降电梯的控制装置。日本专利第6350767所记载的升降电梯的控制装置以使多个自主移动体不会同时向升降电梯内上电梯的方式而进行控制。
技术实现思路
1、日本利第6350767所记载的升降电梯的控制装置即使在升降电梯内移动体进行同乘也不会发生障碍的情况下,也会以使移动体不会上电梯的方式而进行控制。
2、因此,在日本专利第6350767所记载的升降电梯控制装置中,存在无法充分地使移动体的运行计划顺畅化这样的课题。
3、本公开是为了解决这样的课题而完成的发明,其目的在于,提供一种能够使自主移动体的运行顺畅化的移动体控制系统、移动体控制方法以及存储介质。
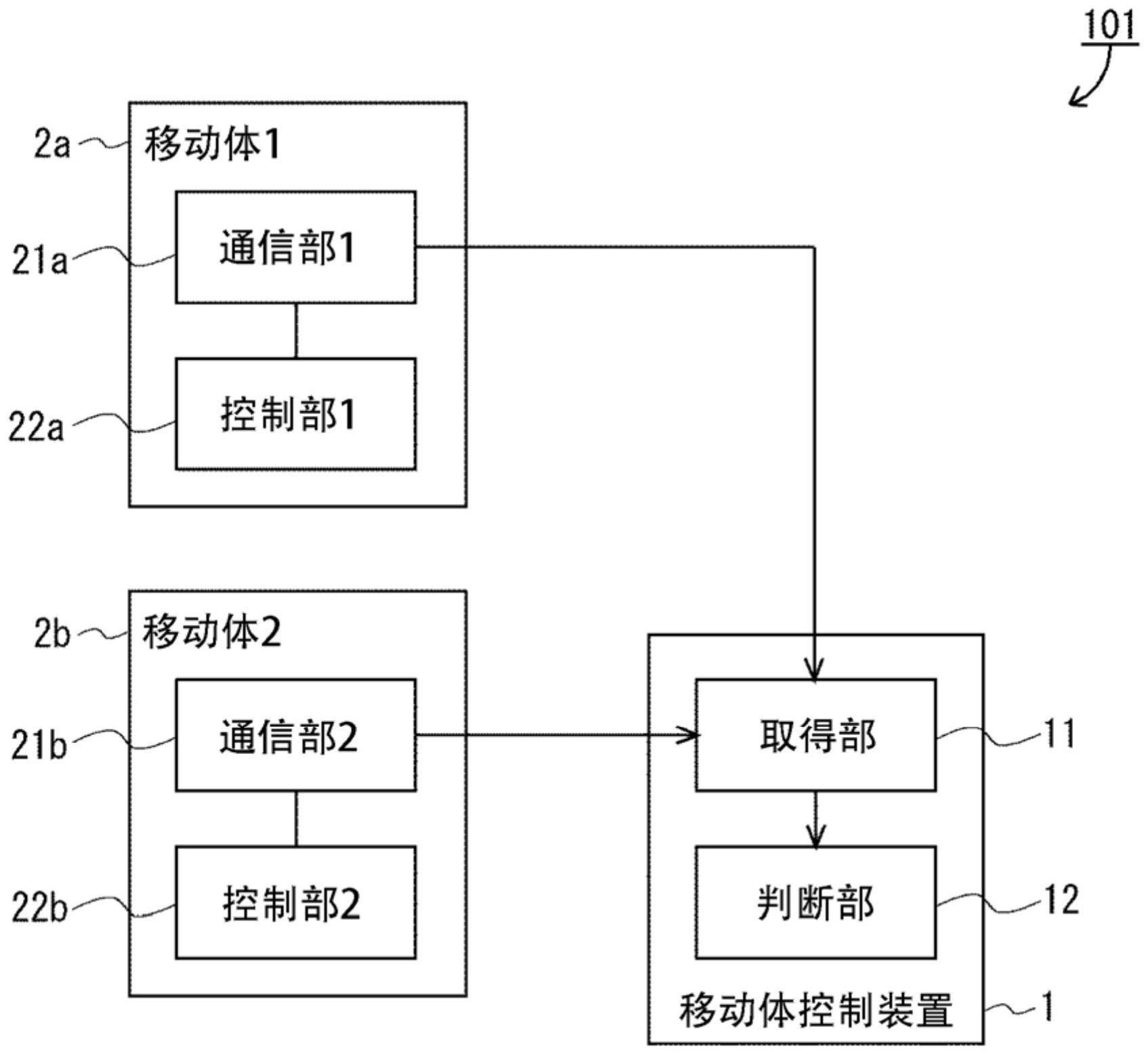
4、本发明的第一方式所涉及的移动体控制系统具备:取得部,其取得向升降电梯轿厢上电梯的第一移动体以及第二移动体的、与上电梯处相关的信息和与目的地相关的信息;
5、判断部,其基于所述移动体的与上电梯处相关的信息和与目的地相关的信息,而对是否会发生所述第一移动体和所述第二移动体的交错移动进行判断。在所述判断部判断为会发生所述第一移动体和所述第二移动体的交错移动的情况下,使所述第一移动体以及所述第二移动体中的至少一方对运行计划进行变更。
6、根据这样的结构,能够对自主移动体的交错移动的发生进行抑制。作为其结果,能够使自主移动体顺畅地运行。
7、在上述第一方式所涉及的移动体控制系统中,也可以设为,在所述判断部判断为会发生所述第一移动体和所述第二移动体的交错移动的情况下,使被判断为会发生交错移动的所述移动体中的至少一方等待向所述升降电梯轿厢的上电梯。
8、在上述第一方式所涉及的移动体控制系统中,也可以设为,在所述判断部判断为会发生所述第一移动体和所述第二移动体的交错移动的情况下,使被判断为会发生交错移动的所述移动体中的至少一方放弃向升降电梯轿厢的上电梯。
9、在上述第一方式所涉及的移动体控制系统中,也可以设为,与所述上电梯处相关的信息包括表示上电梯处的楼层数的信息,与所述目的地相关的信息包括表示目的地的楼层数的信息。
10、在上述第一方式所涉及的移动体控制系统中,也可以设为,所述升降电梯轿厢具备多个门,与所述上电梯处相关的信息包括表示上电梯处的楼层数的信息、和上电梯的门的识别信息,与所述目的地相关的信息包括表示目的地的楼层数的信息、和下电梯的门的识别信息。
11、在上述第一方式所涉及的移动体控制系统中,也可以设为,所述判断部在对从第一门上电梯且从第二门下电梯的第一移动体和仅从所述第一门以及第二门中的任意一方上下电梯的第二移动体是否会交错移动进行判断的情况下,对由下述数学式1所表示的xy坐标上的第一坐标图和由下述数学式2所表示的xy坐标上的第二坐标图是否具有交点进行判断,且在所述第一坐标图和第二坐标图具有交点的情况下,判断为会发生第一移动体和第二移动体的交错移动。
12、数1
13、
14、数2
15、y=k(x-c)(x-d)+m···数学式2
16、其中,a为所述第一移动体的上电梯处的楼层数,b为所述第一移动体的目的地的楼层数,c为所述第二移动体的上电梯处的楼层数,d为所述第二移动体的目的地的楼层数,m1以及m2为互不相同的实数,在所述第二移动体从所述第一门进行上下电梯的情况下,m为m1,在所述第二移动体从所述第二门进行上下电梯的情况下,m为m2,在m为m1以及m2之中较大的一方的值的情况下,k为正实数,在m为m1以及m2之中较小的一方的值的情况下,k为负实数,k满足下述式3,
17、数3
18、
19、f为所述升降电梯轿厢能够移动的楼层的总数。
20、本发明的第二方式所涉及的移动体控制方法具备如下处理,即:
21、取得向升降电梯轿厢上电梯的第一移动体以及第二移动体的与上电梯处相关的信息和与目的地相关的信息;
22、基于所述移动体的与上电梯处相关的信息和与目的地相关的信息,而对是否会发生所述第一移动体和所述第二移动体的交错移动进行判断;
23、在被判断为会发生所述第一移动体和所述第二移动体的交错移动的情况下,使所述第一移动体以及所述第二移动体中的至少一方的运行计划进行变更。
24、本发明的第三方式所涉及的存储介质为,存储有能够由一个或多个处理器来执行且用于使所述一个或多个处理器执行以下的功能的命令的存储介质。
25、所述功能包括:
26、取得向升降电梯轿厢上电梯的第一移动体以及第二移动体的与上电梯处相关的信息和与目的地相关的信息;
27、基于所述移动体的与上电梯处相关的信息和与目的地相关的信息,而对是否会发生所述第一移动体和所述第二移动体的交错移动进行判断;
28、在被判断为会发生所述第一移动体和所述第二移动体的交错移动的情况下,使所述第一移动体以及所述第二移动体中的至少一方的运行计划进行变更。
29、通过本公开,能够提供一种可以使自主移动体的运行顺畅化的移动体控制系统、移动体控制方法以及存储介质。
技术特征:
1.一种移动体控制系统,具备:
2.如权利要求1所述的移动体控制系统,其中,
3.如权利要求1所述的移动体控制系统,其中,
4.如权利要求1至3中任意一项所述的移动体控制系统,其中,
5.如权利要求4所述的移动体控制系统,其中,
6.如权利要求5所述的移动体控制系统,其中,
7.一种移动体控制方法,包括如下处理,即:
8.一种存储介质,其存储能够由一个或多个处理器来执行且用于使所述一个或多个处理器执行以下的功能的命令,其中,
技术总结
本公开提供一种移动体控制系统、移动体控制方法以及存储介质。所述移动体控制系统具备:取得部,其取得向升降电梯轿厢上电梯的第一移动体以及第二移动体的、与上电梯处相关的信息和与目的地相关的信息;判断部,其基于移动体的与上电梯处相关的信息和与目的地相关的信息,而对是否会发生第一移动体和第二移动体的交错移动进行判断。在判断部判断为会发生第一移动体和第二移动体的交错移动的情况下,使第一移动体以及第二移动体中的至少一方对运行计划进行变更。
技术研发人员:池内祥人,小田志朗,松井毅
受保护的技术使用者:丰田自动车株式会社
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!