一种面向异构网联智能卡车的纵向编队管理控制方法
本发明涉及智能卡车协同调度,尤其是涉及一种面向异构网联智能卡车的纵向编队管理控制方法。
背景技术:
1、随着全球化贸易发展,物流运输需求激增,物流行业迎来机遇与挑战。卡车是物流货运不可或缺的道路载具,目前卡车货运存在以下问题:运输效率低,缺乏物流区域集卡协调调配,导致空车运输多、运输路线重复;运输成本高,人力成本和燃油成本在卡车物流运营成本中占据较大比重,以港口物流为例,据统计人工成本已达到港口物流整体成本70%,并呈逐渐增加的趋势;智能化水平差,卡车运力无法得到充分利用,在全域调度、编队驾驶等智慧化功能上还有较大提升空间。因此,亟需采取一种新的技术方法加速实现卡车运输的智能化与无人化,有效应对上述问题。
2、作为交通运输系统的最新发展方向,车路协同极大地拓展了运载工具和道路基础设施的信息获取与交互手段,能够大幅度提高物流区域的智能化和无人化水平。作为车路协同重要场景之一,卡车编队可以减少车队驾驶员数量、降低风阻和能耗,进而大幅度减小卡车货运人工及油料成本,具有广阔的商业前景和应用价值。同时,港口物流区域内卡车的协同智能调度、组队、离队决策,可以有效提升卡车运输的运力运量和智能化水平。
3、然而,现有的卡车编队系统仍存在一定缺陷:大多仅支持单一品牌卡车的编队,无法适应异构化卡车混合编队;由于卡车底层控制器响应具有随机不确定性,因此系统建模误差必然存在,需要经过标定过程确认未知的控制参数。除此之外,在考虑环境不确定性方面,以往大部分研究对车队中人类驾驶车辆(如头车)的预期状态进行预测,然而人类驾驶行为具有很强的随机性,不同的预测方法均不能避免预测误差的产生,从而影响队列稳定性。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种面向异构网联智能卡车的纵向编队管理控制方法,能够支持异构化卡车混合编队、提高编队驾驶稳定性。
2、本发明的目的可以通过以下技术方案来实现:一种面向异构网联智能卡车的纵向编队管理控制方法,包括以下步骤:
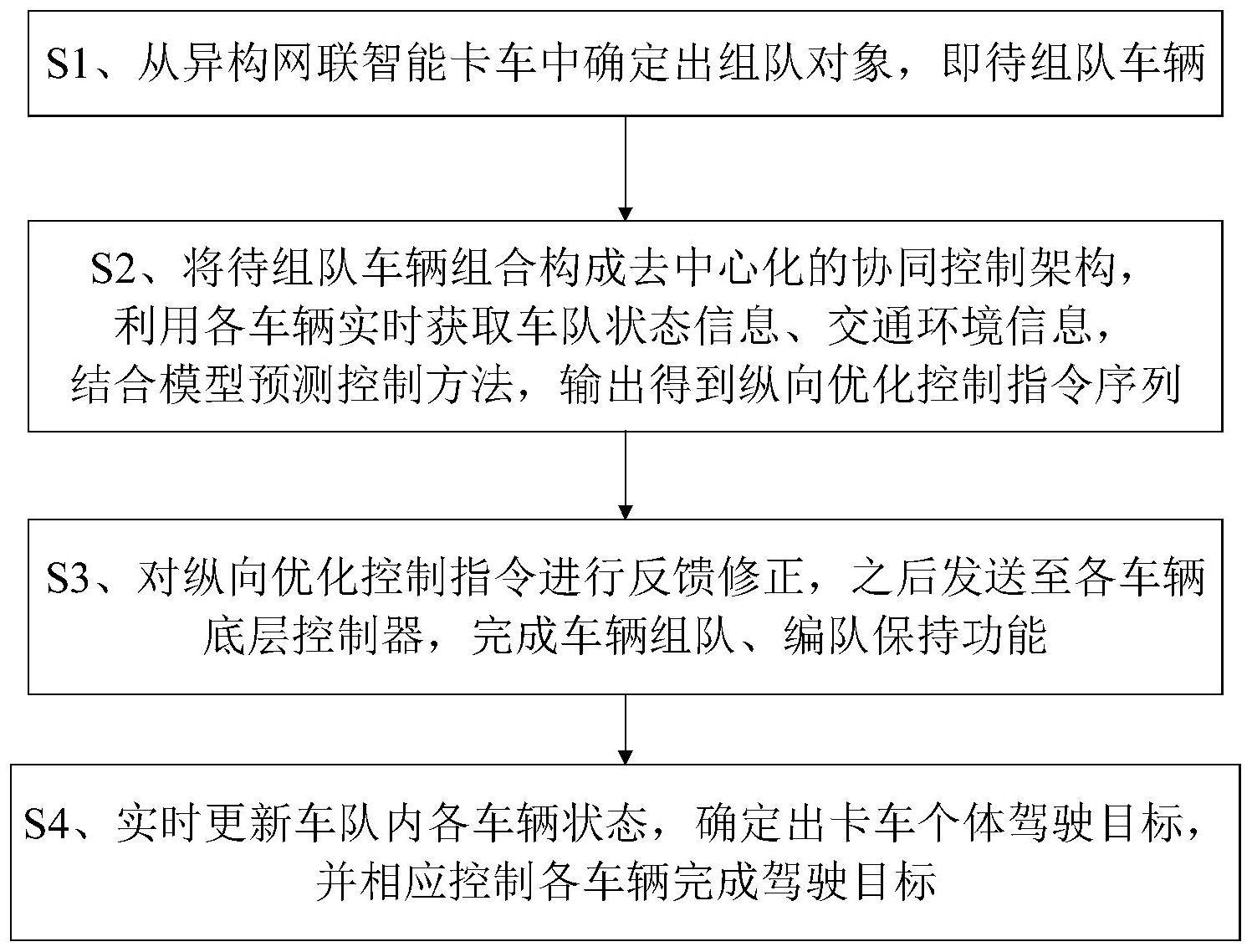
3、s1、从异构网联智能卡车中确定出组队对象,即待组队车辆;
4、s2、将待组队车辆组合构成去中心化的协同控制架构,利用各车辆实时获取车队状态信息、交通环境信息,结合模型预测控制方法,输出得到纵向优化控制指令序列;
5、s3、对纵向优化控制指令进行反馈修正,之后发送至各车辆底层控制器,完成车辆组队、编队保持功能;
6、s4、实时更新车队内各车辆状态,确定出卡车个体驾驶目标,并相应控制各车辆完成驾驶目标。
7、进一步地,所述步骤s1具体是根据卡车运输订单、物流货运需求,从不同品牌、不同车辆结构、不同载荷的异构网联智能卡车中确定组队对象。
8、进一步地,所述步骤s1包括以下步骤:
9、s11、以物流货运安全、准时、高效、经济为目标,以路网拓扑结构、物流配送需求、卡车承载量为强制约束,构建网联智能卡车群任务派发与组队优化策略,为卡车分配订单业务,确定组队对象;
10、s12、基于本车状态、前车状态、车队通讯信息设计id管理规则,实时更新卡车车队行驶状态和车队中每辆卡车的id信息。
11、进一步地,所述id管理规则具体为:
12、当本车未被分配id且不属于离队状态,并存在以下任意一种情况:1)前方无可通信车辆;2)前方存在可通信车辆,但本车为插队状态;3)前方存在可通信车辆,本车不是插队状态,但前车为离队状态;则本车被设置为头车模式,id=1;
13、当上述三种情况均不满足时,则判断前车状态,若前车为头车模式,则本车为跟驰模式,id=2;若前车为跟驰模式,则本车也为跟驰模式,根据附近车辆位置排列先后顺序,找到本车前方最近的头车,根据头车反推本车id;
14、当车辆已有id时,则根据附近车辆位置排列先后顺序,根据位置更新本车id。
15、进一步地,所述步骤s2包括以下步骤:
16、s21、本车车载通讯设备接收车队头车、车队前车状态信息,包括当前时刻位置、当前时刻速度、当前时刻加速度;感知设备识别周围障碍物并获取障碍车位置、速度信息,获取车道信息;
17、s22、将接收到的车队状态信息整合、提取成为具有规范化格式的时间序列数据;
18、s23、查找前车、头车历史轨迹中距离本车当前位置最近的点位,作为模型预测控制优化算法的期望参考点位;
19、s24、根据期望参考点位的头/前车位置、速度信息,计算优化控制所需的期望车头时距、期望慢度;
20、s25、利用模型预测控制模型,以缩小头/前车时距和期望时距之差、头/前车慢度和自车慢度之差为目标,结合异构卡车动力学模型,考虑驾驶限制参数,迭代求解获得最优控制序列。
21、进一步地,所述模型预测控制模型具体为:
22、
23、
24、
25、
26、
27、u0=[alap]
28、
29、
30、rk=β3
31、其中,xt为模型状态量,为本车和头车的期望时距,为本车和前车的期望时距,gl为本车和头车的实际时距,gp为本车和前车的实际时距,wl为头车慢度,即车辆行驶单位距离所经过的时间,wp为前车慢度,w为本车慢度,a为本车加速度,u=δa为模型控制量,δa为加速度增量,为模型系统动态,al为头车加速度,ap为前车加速度,lk为模型目标函数。
32、进一步地,所述步骤s3具体是利用动态矩阵方法对期望加速度进行反馈修正,减小期望加速度和实际执行加速度的误差。
33、进一步地,所述步骤s3中对纵向优化控制指令进行反馈修正的具体过程为:
34、s31、考虑底层控制器的响应延时,建立控制增量、阶跃响应、实际输出量的关系式;
35、s32、考虑系统动态随时间变化、且存在扰动,引入在线自整定控制器,通过标定系统误差,采用预测输出控制指令表示实际输出控制指令。
36、进一步地,所述步骤s31中控制增量、阶跃响应、实际输出量的关系式具体为:
37、
38、其中,ai为不同采样点的阶跃响应值,δu为控制增量,为实际输出量,m为控制域总步数;
39、所述步骤s32中系统误差具体为:
40、
41、其中,y(k+1)是第k+1步的实际输出,是第k+1步的预测输出;
42、所述步骤s32中实际输出控制指令具体为:
43、
44、h=[h1,h2,…,hn]t
45、其中,h为标定序列。
46、进一步地,所述步骤s4的具体过程为:
47、实时更新车队车辆状态信息,计算卡车安全间距、期望间距、实际间距,确定车队保持、组队、离队目标,车队车辆用头车状态、组队状态、跟驰状态和离队状态表示,卡车采用相应策略完成驾驶目标;
48、若确定为车队保持目标,则获取车队状态信息,计算车辆安全间距,并与实际间距进行对比,当本车与前车间距小于安全间距时,执行跟随前车算法;当本车与前车间距大于或等于安全间距时,则执行车队保持算法,车辆跟随头车、前车状态行驶。
49、与现有技术相比,本发明具有以下优点:
50、一、支持异构化卡车混合编队:考虑到跨平台、跨终端的编队需求,本发明可支持异构化卡车全场景编队,同时也可以支持自动驾驶卡车和人类驾驶卡车混合组队。相比于仅支持单一品牌卡车的编队系统,本发明设计的系统兼容性好、适用性强,易于落地。
51、二、提高编队驾驶稳定性:基于空间域模型预测控制方法建立系统动态,追踪人类驾驶头车历史信息,从而避免因预测误差导致的编队驾驶不稳定。利用动态矩阵联系底层控制过程和上层决策结果,考虑动态响应时延,提高控制器的鲁棒性。
52、三、实现多智能体协同作业:本发明攻克卡车协同编队难题,支持多智能体协同编队作业,突破以往单智能体缺乏协同交互性的局限,实现了从单车智能向群体智能、从个体最优向整体最优的突破,大幅度提高物流运输效率。
- 还没有人留言评论。精彩留言会获得点赞!