一种适用于制导探测的分布式SAR构型设计方法
本发明属于分布式集群控制,是一种适用于制导探测的分布式sar构型设计方法。
背景技术:
1、随着现代战场双方博弈对抗手段的日趋激烈,使得战场环境十分的复杂,这给当前精确制导武器的探测和制导手段提出了新的挑战。由于制导控制的要求,一般末端弹道均是处于前视探测,传统探测缺乏方位上的分辨率,使得目标识别跟踪精度大大降低,往往最后一段不能正确寻找目标,特别是针对大型的目标,如航母战斗群、大型驱逐舰、近岸舰船编队等复杂目标时,容易受到角反干扰或者目标散射中心的变化造成目标跟踪丢失,无法实现复杂场景下对此类目标的精确打击。
2、分布式sar成像探测体制和导弹平台结合形成的弹载分布式sar成像探测技术,在许多特定的场合具有无可比拟的信息获取优势,尤其在弹群处于末端制导阶段,分布式sar成像探测技术可以实现前视时接收方也能对目标进行高分辨成像,结合目标分选和识别技术,从而可以在复杂的环境下分离出目标,进而实现对目标进行精确打击。现有技术中已经开始对分布式sar成像探测技术进行了大量研究,比如中国专利cn103901430b、cn108562902b和cn111273678b。
3、但是,针对制导阶段,特别是末端制导阶段,弹群机动和制导约束带来的复杂弹群几何和轨道差异大等特性给分布式sar构型设计带来的挑战。
技术实现思路
1、鉴于上述问题,本发明提供了一种适用于制导探测的分布式sar构型设计方法,解决了现有技术中对目标定位不精确、轨迹规划复杂的问题。
2、本发明提供的一种适用于制导探测的分布式sar构型设计方法,其特征在于,包括以下具体步骤:
3、步骤1、构建分布式sar任意移变构型的空间模型;
4、步骤2、基于梯度理论,构建分布式sar任意移变构型的距离向分辨率模型和地距方位向分辨率模型;
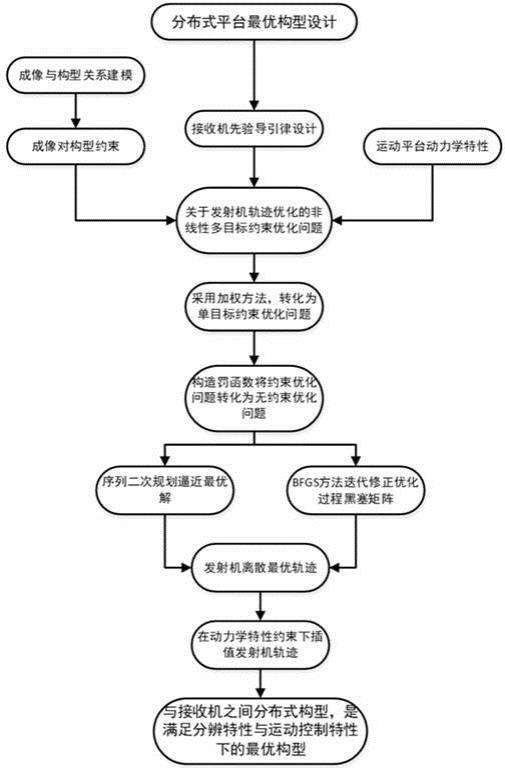
5、步骤3、基于分布式sar任意移变构型的距离向分辨率模型和地距方位向分辨率模型,建立非线性多目标优化方程;
6、步骤4、对步骤3得到的非线性多目标优化方程进行求解,获得最优分辨率下的最优轨迹。
7、可选地,分布式sar任意移变构型为双基前视sar模型;所述双基前视sar模型包括接收机和无人机的动态空间模型。
8、可选地,步骤1的具体步骤如下:
9、建立接收机的发射坐标系,以接收机的开机位置投影到当地水平面的投影点为发射坐标系的坐标原点,以接收机的开机位置的速度在当地水平面的投影速度方向的航向为发射坐标系的 x轴,以垂直当地水平面向上的方向为发射坐标系的 y轴,基于 xy轴确定发射坐标系的 z轴;探测目标场景位于接收机正前方,接收机正前视探测目标场景区域;
10、获取接收机的位置信息、速度信息和加速度信息:
11、接收机的位置信息为 p rk=( x rk, y rk, z rk),速度信息为 v rk=( v rxk, v ryk, v rzk)和加速度信息为 a rk=( a rxk, a ryk, a rzk),其中, k为第 k个时刻, x rk, y rk和 z rk分别为第 k个时刻接收机在 x轴、 y轴和 z轴的初始坐标, v rxk, v ryk和 v rzk分别为第 k个时刻接收机在 x轴、 y轴和 z轴的速度, a rxk, a ryk和 a rzk分别为第 k个时刻接收机在 x轴、 y轴和 z轴的加速度;
12、获取无人机的位置信息、速度信息和加速度信息:
13、无人机的位置信息为 p tk=( x tk, y tk, z tk),速度信息为 v tk=( v txk, v tyk, v tzk)和加速度信息为 a tk=( a txk, a tyk, a tzk),其中, x tk, y tk和 z tk分别为第 k个时刻无人机在 x轴、 y轴和 z轴的初始坐标, v txk, v tyk和 v tzk分别第 k个时刻为无人机在 x轴、 y轴和 z轴的速度, a txk, a tyk和 a tzk分别为第 k个时刻无人机在 x轴、 y轴和 z轴的加速度;
14、步骤14、建立探测目标的成像场景的网格点:
15、设定探测目标场景水平,探测目标处于水平面,获取探测目标初始的位置信息为 p p=( x p,0, z p), x p为探测目标在 x轴的初值坐标,探测目标在 y轴的坐标为0, z p为探测目标在 z轴的初始坐标;
16、按照预设成像幅宽对探测目标的成像场景进行网格划分,划分的 x轴步长和 z轴步长分别为△ x和△ z,探测目标的成像场景各个网格点的位置信息为 p( i, j)=( x i,0, z j):
17、 p( i, j)=( x i,0, z j)=( x p +m·△ x,0, z p +n·△ z);
18、其中, m=- m:1: m, n=- n:1: n, m和 n分为成像幅宽划分的网格以探测目标初始的位置为起点的 x轴的格数和 z轴的格数; x i为地面网格点在 x轴的坐标, z j为地面网格点在 z轴的坐标。
19、可选地,步骤2的具体步骤如下:
20、构建距离向分辨率模型的具体步骤为:
21、基于步骤1建立的双基前视sar模型,获取第 k个时刻离接收机和无人机的距离均为常数 m的等距离地面坐标点 p mk=( x mk,0, z mk)的位置信息,常数 m与等距离地面坐标点 p mk之间满足以下关系:
22、
23、所有等距离地面坐标点 p mk构成第 k个时刻的等距离线 m bk;
24、获得第个 k时刻的等距离线 m bk上的等距离地面坐标点 p mk的梯度▽ m k,表达式为:
25、
26、其中, i x、 i y和 i z分别表示发射坐标系的 x轴、 y轴和 z轴的单位矢量;
27、获得第 k个时刻的等距离线 m bk上的等距离地面坐标点 p mk沿梯度方向的地距分辨率 ρ rgk,表达式为:
28、
29、其中, c为光速; b r为无人机的雷达探测系统发射脉冲信号的带宽;
30、构建方位向分辨率模型的具体步骤为:
31、基于步骤1建立的双基前视sar模型,获取第 k个时刻时离接收机和无人机的等距离线 m bk上的地面坐标点 p mk的单位斜距向量和,表达式为:
32、
33、获得第 k个时刻时等距离线 m bk上的地面坐标点 p mk的多普勒 f dk,表达式为:
34、
35、其中, v rk和 v tk分别为接收机第 k个时刻的速度信息 v rk=( v rxk, v ryk, v rzk)和无人机的速度信息 v tk=( v txk, v tyk, v tzk); λ为雷达探测系统的波长;
36、基于第 k个时刻时等距离线 m bk上的地面坐标点 p mk的多普勒 f dk,获取第 k个时刻的等多普勒线 f dk,表达式为:
37、 f dk= const;
38、获得第 k个时刻的等多普勒线在等距离线上的地面坐标点 p mk的梯度▽ f dk,表达式为:
39、
40、
41、
42、
43、获得雷达的合成孔径时间△ t内,第 k个时刻的等距离线上的地面坐标点沿多普勒梯度方向的地距方位向分辨率,表达式为:
44、
45、其中,△ t为雷达的合成孔径时间,即波束在成像区域的驻留时间。
46、可选地,步骤3的具体步骤如下:
47、获得第 k个时刻的探测目标的成像场景每个网格点的距离向分辨率,表达式为:
48、
49、
50、
51、其中,▽ m k( i, j)表示第 k个时刻探测目标的成像场景第( i, j)个网格点的距离梯度;
52、获得第 k个时刻的探测目标的成像场景每个网格点的方位向分辨率,表达式为:
53、
54、
55、
56、
57、其中,▽ f dk( i, j)表示第 k个时刻探测目标的成像场景各个网格点的多普勒梯度;
58、获得第 k个时刻的探测目标的成像场景每个网格点的距离梯度与多普勒梯度的梯度夹角,表达式为:
59、
60、基于最严格探测准则,获得第 k个时刻时轨迹分段的成像探测结果:
61、max ρ rg_k=max(max( ρ rg_k));
62、max ρ a_k=max(max( ρ a_k));
63、min ψ k=min(min( ψ k));
64、其中,max ρ rg_k、max ρ ak和min ψ k分别表示第 k个时刻的探测目标的成像场景各个网格点的最大距离分辨率、最大方位分辨率和最小梯度夹角;
65、提取第 k个时刻的优化变量 x k,表达式为:
66、 x k =( x tk, y tk, z tk, v txk, v tyk, v tzk) t;
67、基于第 k个时刻的优化变量 x k,构建非线性多元目标优化函数,表达式为:
68、
69、其中, f1( x k)表示距离分辨率优化函数, f2( x k)表示方位分辨率优化函数, f3( k x)表示方位分辨率优化函数; ρ rg_opt表示根据定位精度要求反算的地距距离分辨率期望, ρ a_opt表示根据定位精度要求反算的地距方位分辨率期望, ψ opt表示期望的二维分辨率夹角;
70、基于非线性多元目标优化函数,构建第 k个时刻加权优化函数 f( x k),表达式为:
71、
72、其中, ω k为第 k个时刻的加权系数; f n( x k)表示第 n个单目标优化函数; u为目标优化的解的空间;
73、将加权优化函数 f( x k)转化为非线性多目标优化方程的最优求解问题 x opt, k,表达式为:
74、
75、其中, p为参数空间集合。
76、与现有技术相比,本发明至少具有如下有益效果:
77、(1)本发明的构型设计方法在弹群基于分布式sar成像制导过程中,可以实时获得最优的分布式平台运动轨迹,进而获得最优的目标探测空间分辨率,为对目标的精确制导打击提供良好的探测信息,提高弹群在复杂环境下的对敌目标精确打击效能。
78、(2)本发明的构型设计方法基于末端制导分布式sar任意移变几何关系,直接构建分布式平台运动信息与成像性能间的模型,并建立了非线性多元的目标函数,利用非线性多目标优化法对分布式平台轨迹进行规划,分布式平台轨迹进行规划过程简单高效。
- 还没有人留言评论。精彩留言会获得点赞!