一种基于PLC工业网关的可移动设备监测系统的制作方法
本发明涉及plc网关,具体涉及一种基于plc工业网关的可移动设备监测系统。
背景技术:
1、plc控制工厂中存在大量可移动的设备,其中一些设备由于其价值和重要程度较高,需要对其进行持续性的监测管控。
2、传统的设备监测手段是通过专员对设备进行管理,但是无法实现实时监测的效果,且人员成本高昂;现有针对可移动设备监测系统通常采用图像监测的方法,训练图像识别模型对可移动设备进行识别,并通过像素位置确定被监测设备是否发生移动。该方法识别准确率高,适用范围广,技术成熟,被广泛运用在各种针对可移动设备的监测场景中。
3、但是,该技术需要部署针对不同的可移动设备训练对应的识别模型,并且需要在plc控制工厂监测区域部署摄像头、数据光缆等,其部署成本高、训练时间长、涉及到的改动量大;在一些传统工厂中并不适合部署新的监测设备;此外,该监测方法只有图像监测一种维度,无法对可移动设备的相关状态进行监测,缺乏多维度监测手段。
4、因此,本发明提出一种基于plc工业网关的可移动设备监测系统。来解决上述技术问题。
技术实现思路
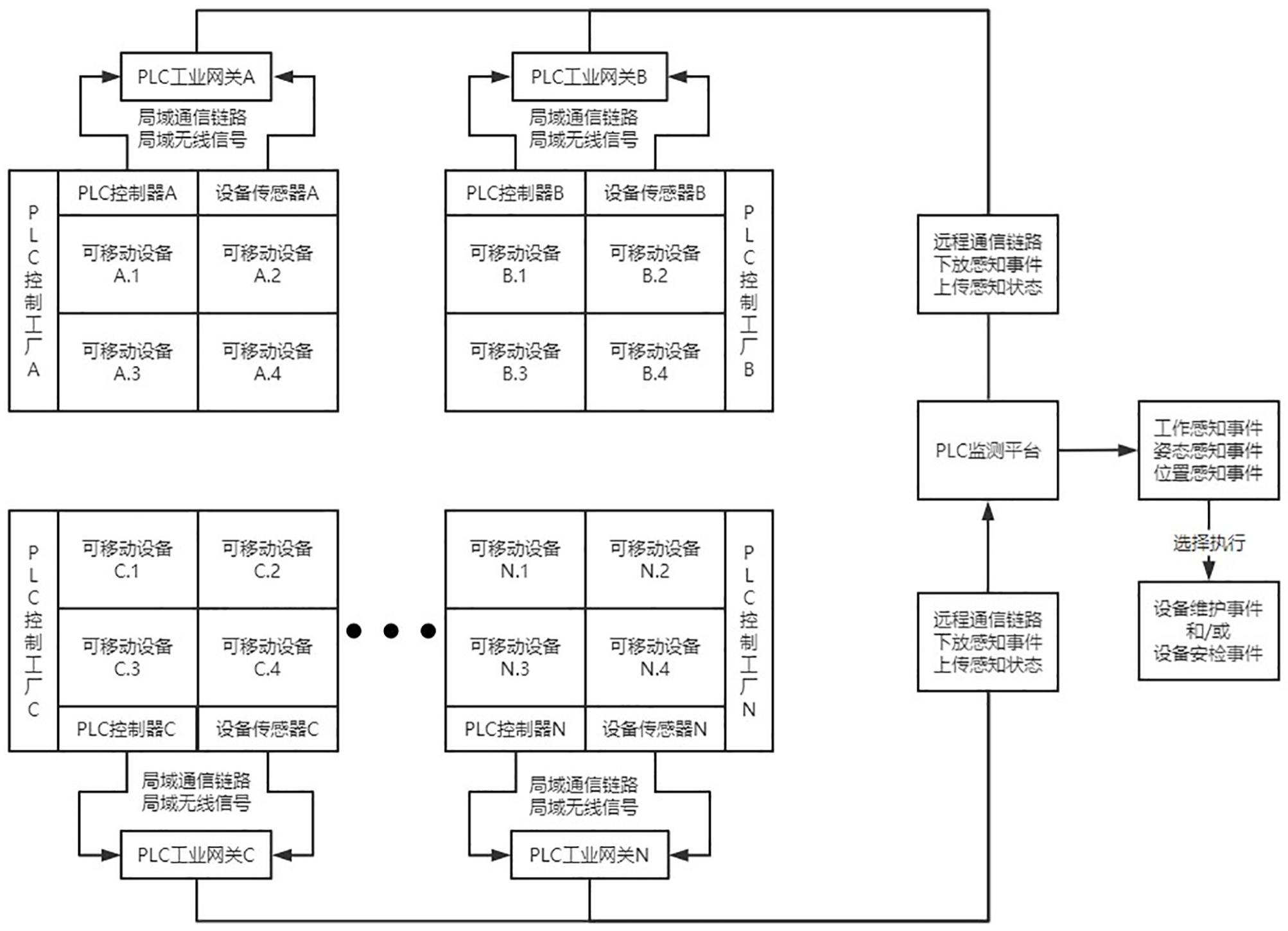
1、本发明的目的在于克服现有技术的不足,提供一种基于plc工业网关的可移动设备监测系统,包括:plc监测平台和plc控制工厂;plc控制工厂中设置有plc工业网关、plc控制器、若干个可移动设备和对应的设备传感器;plc工业网关通过局域通信链路与plc控制器连接;plc控制器通过i/o口与各可移动设备进行连接,plc工业网关通过局域无线信号与设备隶属的设备传感器进行连接;plc工业网关通过远程通信链路与plc监测平台连接,执行plc监测平台下放的感知事件,并上传得到的感知状态。
2、具体的,设备传感器包括:带温度补偿的陀螺仪传感器,感知事件为:可移动设备监测;plc监测平台构建与感知事件对应的采集流程,并下放至执行边缘处理的plc工业网关;plc工业网关进行解包部署,通过陀螺仪传感器得到设备温度数据、设备位置数据和设备姿态数据,并执行可移动设备感知事件;plc监测平台接收感知状态,并选择执行对应的设备维护事件和/或设备安检事件;
3、其中,感知事件包括:工作感知事件、姿态感知事件和位置感知事件;其中,工作感知事件包括:工作温度感知、工作设备感知和工作时间感知;姿态感知事件包括:设备倾倒感知、设备震动感知和设备受击感知;位置感知事件包括:设备移动感知、设备位置感知、设备分布感知。
4、作为更进一步的解决方案,用户通过可视化操作界面在plc监测平台构建采集流程,并下放至plc工业网关,plc工业网关通过采集流程对感知事件进行边缘处理,实时得到对应的感知状态;其中,构建采集流程包括:采集流程基础设置、采集流程模块选配、采集流程任务配置和采集流程执行判断;
5、采集流程基础设置,对采集流程的基础运行环境进行配置,包括:数据采集功能运行环境、数据处理功能运行环境、数据接口功能运行环境和数据上传功能运行环境;
6、采集流程模块选配,根据感知事件的边缘计算处理需求,选配采集流程的各类型功能模块,功能模块类型包括:数据采集、数据处理、数据接口和数据上传;
7、采集流程任务配置,创建感知事件并对其进行任务命名和任务说明,设置感知事件的计算处理逻辑,并配置计算处理逻辑所需配置项,得到任务执行文件;其中,配置项为可修改项,并在修改后自动加载并注入任务执行文件;
8、采集流程执行判断,将基础运行环境、选配功能模块和任务执行文件打包封装,并下放至执行边缘处理的plc工业网关;plc工业网关进行解包部署,并通过执行感知事件完成边缘处理。
9、作为更进一步的解决方案,姿态感知事件通过如下步骤进行数据采集:
10、步骤a1:通过陀螺仪传感器采集可移动设备的角速度数据;
11、步骤a2:对角速度数据进行解析,得到可移动设备绕x轴、y轴、z轴的角速度,并分别积分得到可移动设备在各轴的旋转角度;
12、步骤a3:通过各轴的旋转角度计算各轴的加速度分量,并将各轴加速度进行合并,得到原始加速度数据;
13、步骤a4: 原始加速度数据进行滤波处理并去除重力分量,得到可移动设备的加速度数据。
14、作为更进一步的解决方案,姿态感知事件通过如下步骤进行感知状态:
15、设备震动感知:设置震动频率阈值,通过步骤a1获取可移动设备的角速度数据并统计角速度数据变化频率,在角速度数据变化频率超过震动频率阈值时,判断为设备震动异常;
16、设备倾倒感知:设置倾倒判定阈值,通过步骤a2获得可移动设备在各轴的旋转角度并与倾倒判定阈值进行比较,当任一轴的旋转角度大于判定阈值时,判断为设备倾倒异常;
17、设备受击感知:设置受击判定阈值,通过步骤a4获得可移动设备的加速度数据并与受击判定阈值进行比较,当加速度数据超出受击判定阈值时,判断设备受击异常。
18、作为更进一步的解决方案,位置感知事件通过如下步骤进行数据采集:
19、步骤b1:获取可移动设备的加速度数据;
20、步骤b2:对加速度数据进行积分操作,得到可移动设备的位移增量数据;
21、步骤b3:获取陀螺仪传感器与plc工业网关之间局域无线信号的信号强度数据;
22、步骤b4:对信号强度数据进行解析,得到相对距离数据;
23、步骤b5:相对距离数据和位移增量数据进行数据融合处理,得到可移动设备的位置数据。
24、作为更进一步的解决方案,位置感知事件通过如下步骤进行感知状态:
25、分布异常感知:plc工业网关记录各可移动设备均位于标准位置时的位置数据,得到设备标准分布;plc工业网关实时记录各可移动设备的位置数据,得到设备实时分布;当设备标准分布与设备实时分布不匹配时,判断为分布异常;
26、异常来源感知:当判断为分布异常时执行,根据各可移动设备的位置数据进行分析,判断设备分布异常的异常来源;其中,异常来源包括:设备移动、网关移动、同时移动、数据异常和未知异常;
27、移动位置感知:在异常来源为设备移动/网关移动/同时移动时执行;若仅设备移动,则直接通过位置数据对可移动设备的位置进行更新;若网关移动,则通过未移动设备与plc工业网关的位置数据计算网关当前位置,并对设备标准分布和设备实时分布进行更新;若同时存在设备移动和网关移动,计算网关当前位置后再通过位置数据对可移动设备的位置进行更新。
28、作为更进一步的解决方案,通过数据融合算法获取可移动设备在二维平面坐标中的位置数据:
29、获取上帧可移动设备的位置数据( x tn-1 , y tn-1);
30、获取当前可移动设备的位移增量数据( δx tn, δy tn);
31、进行位移叠加,得到推测位置数据( x tn-1+ δx tn, y tn-1+ δy tn);
32、获取当前的相对距离数据 d tn并设置测量波动值 d 0 ,得到测量波动域[ d tn- d 0, d tn+ d 0];
33、通过推测位置数据计算推测相对距离 d tn, d tn=[( x tn-1+ δx tn)2+( y tn-1+ δy tn)2]1/2;
34、通过测量波动域判断推测位置数据是否可信:
35、若 d tn- d 0< d tn< d tn+ d 0,则推测位置数据可信,并作为可移动设备的位置数据进行输出;
36、否则,推测位置数据叠加误差超标,推测位置数据不可信,并进行误差重置;
37、误差重置:将上帧位置数据和推测位置数据作为两端点并确定轨迹线段,通过轨迹线段确定在测量波动域边界上的边界点,将边界点的坐标作为可移动设备的位置数据进行输出。
38、作为更进一步的解决方案,异常来源通过如下步骤进行判断:
39、判断各帧之间的角速度数据与信号强度数据是否为线性连续变化;并在均为线性连续变化时,判断为数据正常;当仅角速度数据为非线性连续变化时,则判断为数据异常;当信号强度数据为非线性连续变化时,则判断为未知异常;
40、在数据正常时,获取各可移动设备的位置数据,并筛除发生变化的位置变化数据;获取位置变化数据对应的位移增量数据,并进行移动判断;
41、设备移动判断:若位移增量数据与位置变化数据均匹配,则为设备移动;位置变化数据仅来源于位移增量数据,通过位移增量数据对可移动设备的位置数据进行更新;
42、网关移动判断:若位移增量数据与位置变化数据不匹配,且位移增量数据为0,则判断为网关移动;位置变化数据仅来源于网关位置变化,对位置变化数据求反并作为网关位置变化数据,并对网关当前位置进行更新;
43、同时移动判断:若位移增量数据与位置变化数据不匹配,且位移增量数据非0,则判断为同时移动;通过位置变化数据减去位移增量数据,得到不匹配差值;通过不匹配差值对网关当前位置进行更新;通过位移增量数据对可移动设备的位置数据进行更新。
44、作为更进一步的解决方案,工作感知事件的采集流程通过如下步骤执行:
45、通过plc控制器获取:实际启停状态数据和实际工作状态数据;
46、通过plc监测平台获取:设定启停状态数据和设定工作状态数据;
47、通过陀螺仪传感器获取:实际工作温度数据,并设定工作温度过载阈值;
48、工作感知事件通过如下步骤感知状态:
49、工作启停感知:实际启停状态数据和设定启停状态数据不匹配时,判断为工作启停异常;
50、工作过载感知:实际工作温度数据超过工作温度过载阈值时,判断为工作温度过载异常;
51、工作状态感知:实际工作状态数据和设定工作状态数据不匹配时,判断为工作状态异常。
52、作为更进一步的解决方案,设备维护事件:在发生设备震动异常、设备倾倒异常、设备受击异常、数据异常、未知异常、工作启停异常、工作温度过载异常和工作状态异常时进行,通过相关人员进行设备维护;
53、设备安检事件:在发生设备倾倒异常、设备受击异常、设备移动、网关移动、同时移动、未知异常和工作启停异常时进行,通过相关人员进行设备安检。
54、本发明不需要对plc控制工厂的原有设备进行改动,也不需要额外铺设光缆、摄像头等硬件设备;仅需对原有plc网关进行改动或者升级,在需要监测的可移动设备上安装设备传感器即可;由于plc网关天然与plc控制器连接,设备传感器仅需通过无线信号进行连接;因此,不会对现有结构进行改变。
55、在进行监测时,plc监测平台下放的感知事件,plc工业网关便能进行边缘监测并上传对应的感知状态,plc监测平台根据感知状态执行对应的设备维护事件和/或设备安检事件,因此方便集中监控管理。此外,感知事件包括:工作感知事件、姿态感知事件和位置感知事件;各感知事件下还包括多种感知情况;能在不添加多余设备的情况下对设备进行多维度监测,解决了现有技术中只停留在一种维度的问题。
56、通过数据融合算法,巧妙结合相对距离数据和推测位置数据,当推测位置数据在测量波动域内时,便认为其数据能大致反应设备的位置情况,具备可信价值;当超出测量波动域时,则认为叠加误差过大,需要选择在测量波动域边界上的边界点来对误差进行重置。
- 还没有人留言评论。精彩留言会获得点赞!