自动驾驶车辆操作方法、电子设备以及计算机可读介质与流程
本公开的实施例总体上涉及操作自动驾驶车辆。更具体地,本公开的实施例涉及基于实时环境数据和实时车辆状态信息,动态生成场景参数。
背景技术:
1、自动驾驶车辆(autonomous driving vehicle,adv)在自动模式下行驶时可以减轻车内人员,尤其是驾驶员的一些驾驶相关任务。当车辆在自动模式下运行时,可以使用车载传感器将车辆导航到不同位置,从而车辆行驶时能够尽量减少人机交互,或在没有乘客的情况下行驶。
2、自动驾驶车辆在路段上行驶时,会遇到各种驾驶场景,例如左转、右转、交叉路口和直行车道。每个驾驶场景(也称为场景)要求自动驾驶车辆根据驾驶情况的特征以不同方式进行驾驶。例如,在交叉路口行驶时,自动驾驶车辆需要比在直行车道内行驶时考虑更多的信息,因为交叉路口比直行车道具有更复杂的道路状况和交通状况。由此,自动驾驶车辆可以利用不同的参数(例如,何时减速、何时加速等)作为额外约束来生成轨迹,以行驶通过不同的场景。
3、然而,对相同类型的场景均使用相同的固定参数集,而不考虑场景位置或自动驾驶车辆进入场景的时间,会导致效率比较低。例如,某一道路上的交叉路口与另一道路上的交叉路口可能具有不同的环境状况。此外,同一道路上的同一场景在一天的不同时段也会具有不同的环境状况。例如,高峰时段比非高峰时段的交通更加繁忙。
技术实现思路
1、本公开提供了一种自动驾驶车辆操作方法、计算机可读介质以及电子设备。
2、根据本公开的一方面,提供了一种计算机实现的自动驾驶车辆adv操作方法,包括:
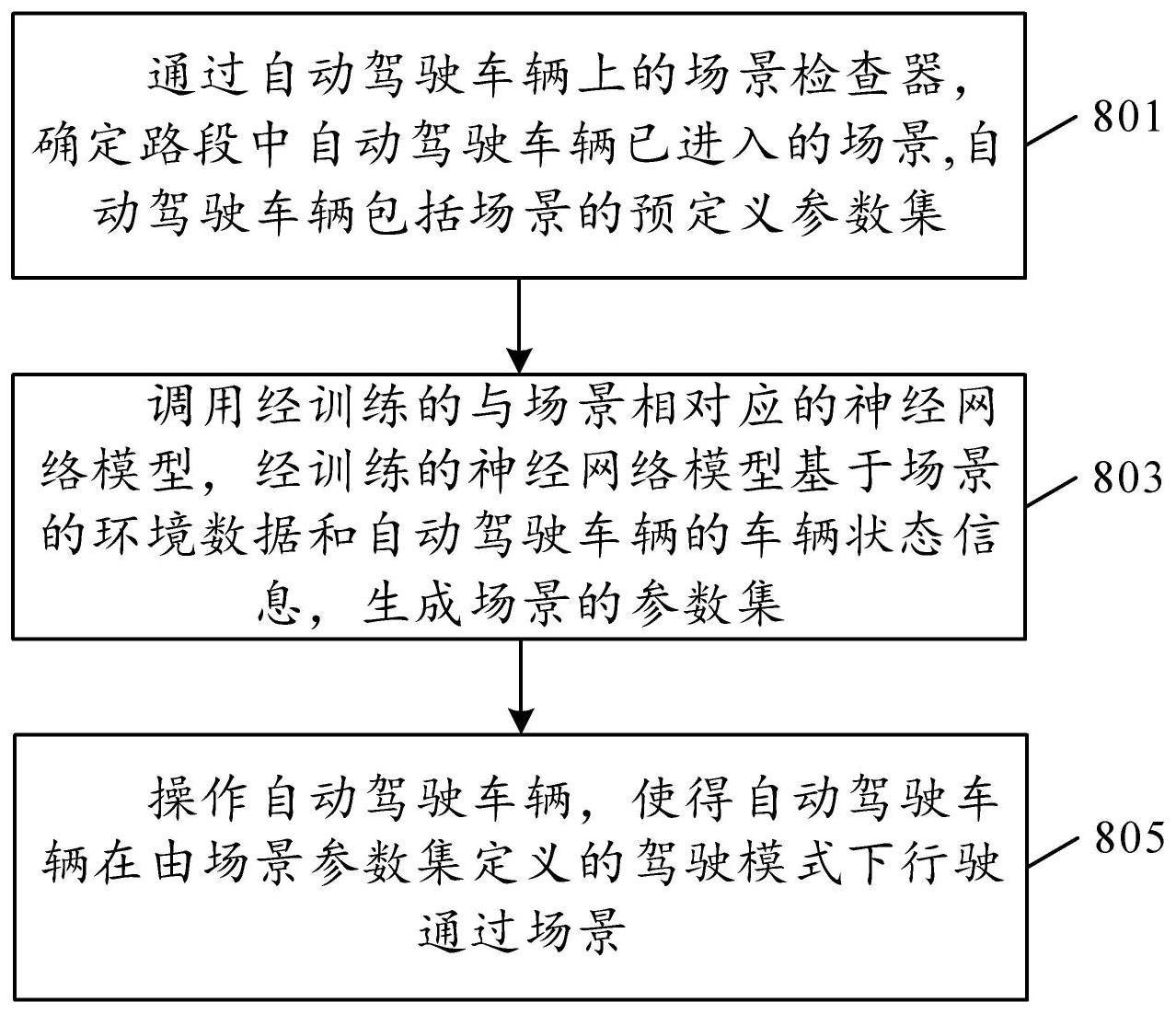
3、通过自动驾驶车辆上的场景检查器,确定路段中自动驾驶车辆已进入的场景;
4、通过自动驾驶车辆,调用经训练的与场景相对应的神经网络模型,其中,经训练的神经网络模型基于场景的环境数据和自动驾驶车辆的车辆状态信息,生成场景的参数集;以及
5、操作自动驾驶车辆,使得自动驾驶车辆在由场景参数集定义的驾驶模式下,行驶通过场景。
6、根据本公开实施例的另一方面,提供了一种存储有指令的非暂时性计算机可读介质,指令在被处理器执行时使得处理器执行以下操作,用于操作自动驾驶车辆adv:
7、确定路段中自动驾驶车辆已进入的场景;
8、调用经训练的与场景相对应的神经网络模型,其中,经训练的神经网络模型基于场景的环境数据和自动驾驶车辆的车辆状态信息,生成场景的参数集;以及
9、操作自动驾驶车辆,使得自动驾驶车辆在由场景参数集定义的驾驶模式下行驶通过场景。
10、根据本公开实施例的另一方面,提供了一种电子设备,包括:
11、处理器;以及
12、与处理器耦接的存储器,存储器存储有指令,指令被处理器执行时,使得处理器执行以下操作,用于操作自动驾驶车辆adv:
13、确定路段中自动驾驶车辆已进入的场景;
14、调用经训练的与场景相对应的神经网络模型,其中,经训练的神经网络模型基于场景的环境数据和自动驾驶车辆的车辆状态信息,生成场景的参数集;以及
15、操作自动驾驶车辆,使得自动驾驶车辆在由场景参数集定义的驾驶模式下行驶通过场景。
16、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种计算机实现的自动驾驶车辆adv操作方法,包括:
2.根据权利要求1所述的计算机实现的方法,其中,所述场景检查器基于所述自动驾驶车辆的当前位置、所述当前位置周围的地图信息、所述自动驾驶车辆正在采用的路线的信息以及所述场景的固定参数集中的一个或多个固定参数,确定所述自动驾驶车辆已进入的场景。
3.根据权利要求2所述的计算机实现的方法,其中,基于历史环境数据和历史车辆状态信息,通过所述经训练的神经网络模型生成所述场景的固定参数集。
4.根据权利要求1所述的计算机实现的方法,其中,所述场景的环境数据包括所述场景的交通量,所述自动驾驶车辆的车辆状态信息包括所述自动驾驶车辆的速度。
5.根据权利要求1所述的计算机实现的方法,其中,所述场景参数集表示所述自动驾驶车辆在生成规划轨迹时所使用的一组额外约束。
6.根据权利要求1所述的计算机实现的方法,其中,所述自动驾驶车辆上的所述场景检查器是卷积神经网络cnn。
7.根据权利要求1所述的计算机实现的方法,其中,所述场景是根据地图信息预定义的多个场景中的一个场景,所述多个场景包括交叉路口、让行标志、停车标志、单车道右转、单车道左转、多车道右转和多车道左转。
8.一种存储有指令的非暂时性计算机可读介质,所述指令在被处理器执行时使得所述处理器执行以下操作,用于操作自动驾驶车辆adv:
9.根据权利要求8所述的非暂时性计算机可读介质,其中,基于所述自动驾驶车辆的当前位置、所述当前位置周围的地图信息、所述自动驾驶车辆正在采用的路线的信息以及所述场景的固定参数集中的一个或多个固定参数,确定所述自动驾驶车辆已进入的场景。
10.根据权利要求9所述的非暂时性计算机可读介质,其中,基于历史环境数据和历史车辆状态信息,通过所述经训练的神经网络模型生成所述场景的固定参数集。
11.根据权利要求8所述的非暂时性计算机可读介质,其中,所述场景的环境数据包括所述场景的交通量,所述自动驾驶车辆的车辆状态信息包括所述自动驾驶车辆的速度。
12.根据权利要求8所述的非暂时性计算机可读介质,其中,所述场景参数集表示所述自动驾驶车辆在生成规划轨迹时所使用的一组额外约束。
13.根据权利要求8所述的非暂时性计算机可读介质,其中,所述自动驾驶车辆上的所述场景检查器是卷积神经网络(cnn)。
14.根据权利要求8所述的非暂时性计算机可读介质,其中,所述场景是根据地图信息预定义的多个场景中的一个场景,所述多个场景包括交叉路口、让行标志、停车标志、单车道右转、单车道左转、多车道右转和多车道左转。
15.一种电子设备,包括:
16.根据权利要求15所述的电子设备,其中,基于所述自动驾驶车辆的当前位置、所述当前位置周围的地图信息、所述自动驾驶车辆正在采用的路线的信息以及所述场景的固定参数集中的一个或多个固定参数,确定所述自动驾驶车辆已进入的场景。
17.根据权利要求16所述的电子设备,其中,基于历史环境数据和历史车辆状态信息,通过所述经训练的神经网络模型生成所述场景的固定参数集。
18.根据权利要求15所述的电子设备,其中,所述场景的环境数据包括所述场景的交通量,所述自动驾驶车辆的车辆状态信息包括所述自动驾驶车辆的速度。
19.根据权利要求15所述的电子设备,其中,所述场景参数集表示所述自动驾驶车辆在生成规划轨迹时所使用的一组额外约束。
20.根据权利要求15所述的电子设备,其中,所述自动驾驶车辆上的所述场景检查器是卷积神经网络cnn。
技术总结
本公开提供了一种自动驾驶车辆操作方法,涉及自动驾驶领域。根据本公开实施例的自动驾驶车辆操作方法包括以下操作:在一个实施例中,当自动驾驶车辆进入驾驶场景时,自动驾驶车辆可以调用基于地图的场景检查器以确定场景的类型,并调用相应的神经网络模型以基于实时环境状况和车辆状态信息生成该场景的参数集。场景参数集可以是一组额外约束,用于将自动驾驶车辆配置为在与该场景相对应的驾驶模式下行驶。
技术研发人员:姜舒,吴思皓,曹昱,林玮曼,胡江滔
受保护的技术使用者:百度(美国)有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!