一种基于改进人工势场模型的船舶避碰路径规划方法
本发明涉及船舶路径规划,特别涉及一种基于改进人工势场模型的船舶避碰路径规划方法。
背景技术:
1、目前,随着我国海上运输业的飞速发展,航海水域内的船舶数量不断增长,水上交通变得越来越复杂多变,水上交通威胁日益增长,船舶安全航行问题日益突出;现有技术基于人工势场对机器人等移动体与障碍物、目标点之间的研究,基本都是从距离角度来改进人工势场,常忽略移动体与障碍物的速度势场影响因素;且人工势场法存在局部极小点问题,船舶航行水域情况复杂,难以构建合适的势函数来减小或避免局部极小点的出现。
2、因此,本发明提供一种基于改进人工势场模型的船舶避碰路径规划方法。
技术实现思路
1、本发明提供一种基于改进人工势场模型的船舶避碰路径规划方法,用以通过规划船舶的第一行驶路线,获取所述第一行驶路线上的船舶行驶数据,将速度势场融合到所述第一行驶路线的距离势场中,得到改进人工势场模型,确定每个行驶点的引力以及斥力,确定船舶的最佳转向角度以及最佳转向速度,对第一行驶路线进行优化,得到第二行驶路线,不仅克服了局部极小点问题,而且提高了船舶水上航行安全以及船舶水上交通效率。
2、本发明提供一种基于改进人工势场模型的船舶避碰路径规划方法,包括
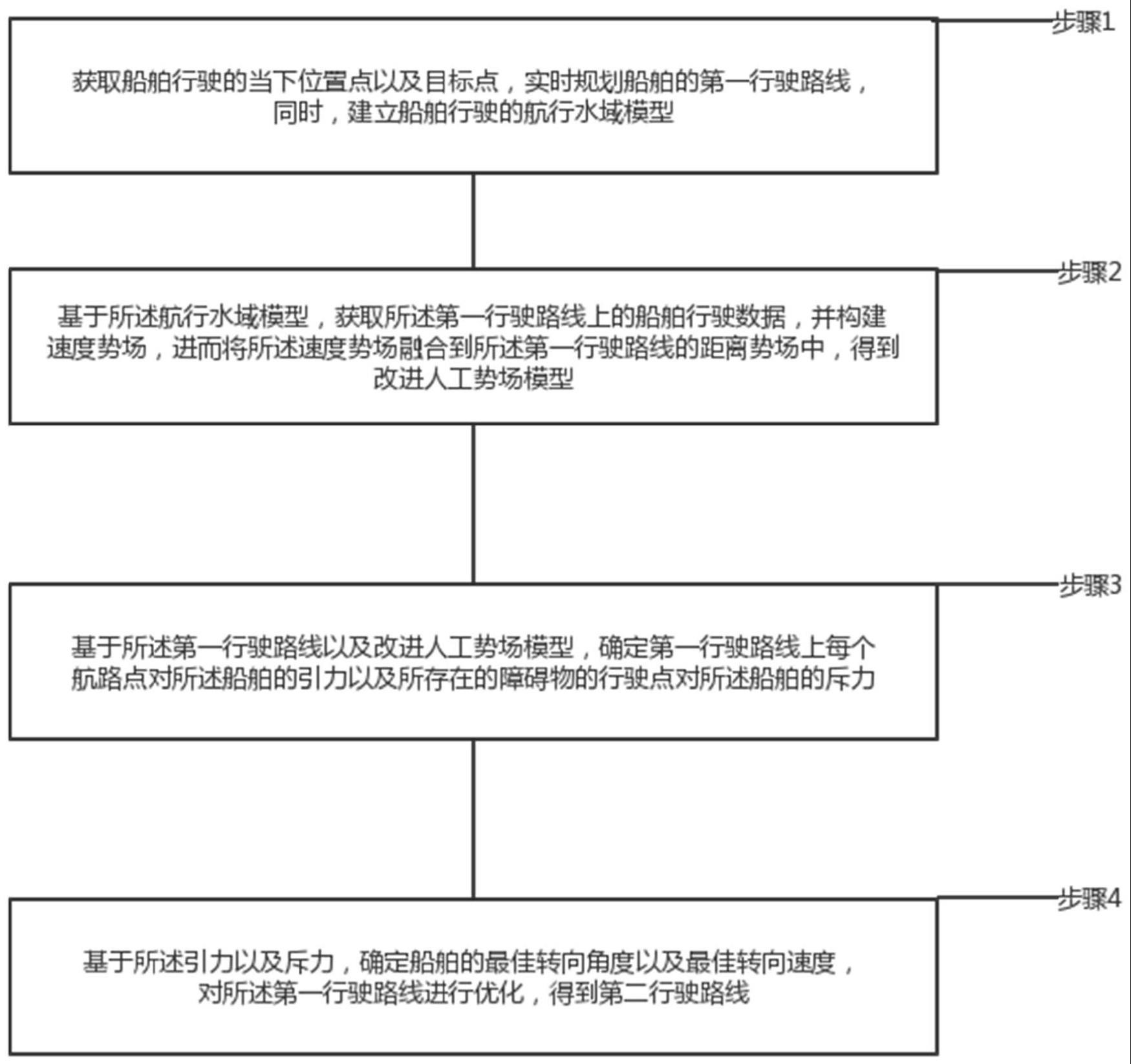
3、步骤1:获取船舶行驶的当下位置点以及目标点,实时规划船舶的第一行驶路线,同时,建立船舶行驶的航行水域模型;
4、步骤2:基于所述航行水域模型,获取所述第一行驶路线上的船舶行驶数据,并构建速度势场,进而将所述速度势场融合到所述第一行驶路线的距离势场中,得到改进人工势场模型;
5、步骤3:基于所述第一行驶路线以及改进人工势场模型,确定第一行驶路线上每个航路点对所述船舶的引力以及所存在的障碍物的行驶点对所述船舶的斥力;
6、步骤4:基于所述引力以及斥力,确定船舶的最佳转向角度以及最佳转向速度,对所述第一行驶路线进行优化,得到第二行驶路线。
7、优选的,获取船舶行驶的当下位置点以及目标点,实时规划船舶的第一行驶路线,包括:
8、获取船舶行驶的当下位置点与目标点的位置数据,基于船舶航行水域地形,规划船舶第一行驶路线;
9、若第一行驶路线存在多个转向点,则将转向点设为船舶行驶的航路点;
10、否则,将第一行驶路线平均取若干行驶点设为船舶行驶的航路点。
11、优选的,基于所述航行水域模型,获取所述第一行驶路线上的船舶行驶数据,并构建速度势场,包括:
12、建立船舶行驶的航行水域模型,其中,所述航行水域模型是基于当下位置点、目标点以及航路点的位置数据、航行水域的当下外部环境数据、航行水域中的静态障碍物的位置数据以及动态干扰船的当下行驶数据、当下外部环境数据所规划的船舶的允许航向方向以及允许航行速度构建得到的;
13、基于所述航行水域模型,获取所述第一行驶路线上每个行驶点的船舶行驶数据;
14、基于所述第一行驶路线上每个行驶点的船舶行驶数据,确定在每个行驶点下的船舶与相应行驶点下的静态障碍物以及动态干扰船舶之间的相对速度;
15、基于每个行驶点的船舶与静态障碍物以及动态干扰船舶之间的相对速度,构建船舶行驶的速度势场。
16、优选的,将所述速度势场融合到所述第一行驶路线的距离势场,得到改进人工势场模型,包括:
17、基于所述航行水域模型,获取船舶在每个行驶点的位置数据以及与每个行驶点存在相邻前进衔接关系的静态障碍物和动态干扰船舶的位置数据,并构建所述第一行驶路线的距离势场;
18、将速度势场与距离势场按照同行驶点原则进行一一对应,得到所述第一行驶路线的改进人工势场模型。
19、优选的,确定第一行驶路线上每个航路点对所述船舶的引力以及所存在的障碍物的行驶点对所述船舶的斥力,包括:
20、基于所述第一行驶路线以及改进人工势场模型,确定每个航路点的引力势场作用范围;
21、基于每个航路点的引力势场作用范围,获取对应航路点对所述船舶的引力;
22、对每个行驶点所存在的障碍物进行标准化建模,以障碍物的最长直径为基础构建障碍物的等效圆形障碍物模型;
23、基于等效圆形障碍物模型、所述第一行驶路线以及改进人工势场模型,确定静态障碍物的斥力势场作用范围以及动态干扰船舶的斥力势场作用范围;
24、基于静态障碍物的斥力势场作用范围以及动态干扰船舶的斥力势场作用范围,获取每个行驶点下所存在的障碍物对所述船舶的斥力;
25、其中,引力方向与斥力方向均以正北方向为0度方向,沿顺时针方向增大角度。
26、优选的,基于所述引力以及斥力,确定船舶的最佳转向角度以及最佳转向速度,对所述第一行驶路线进行优化,得到第二行驶路线,包括:
27、基于每个行驶点的引力以及斥力,确定船舶避让障碍物的转向方向;
28、记录船舶避让障碍物的转向方向,建立所述船舶的待工作数据集;
29、根据船舶在每个行驶点的初始航速以及初始航向,确定船舶的势场影响范围;
30、根据静态障碍物的斥力势场作用范围以及动态干扰船舶的斥力势场作用范围,确定所述船舶与相应行驶点的障碍物之间的最佳安全航行距离;
31、根据船舶的待工作数据集以及船舶的势场影响范围,获取船舶的操纵性能;
32、根据船舶行驶的航行水域模型,获取风流对船舶在每个行驶点的行驶航向与行驶航速的影响;
33、根据船舶与每个行驶点所存在的障碍物之间的最佳安全航行距离、船舶的操纵性能以及风流对每个行驶点的船舶行驶航向与行驶航速的影响,确定船舶避让行驶点所存在的障碍物的转向角度以及对应的转向速度;
34、同时,基于第一行驶路线中每个障碍物的斥力势场作用范围,确定相应行驶点的驶离距离,并构建基于所述第一行驶路线的斥力链;
35、筛选所述斥力链中行驶点所对应的驶离距离小于第一距离的第一点、行驶点所对应的驶离距离为0的第二点以及行驶点所对应的驶离距离大于第一距离的第三点;
36、分别对所述第一点、第二点以及第三点进行不同颜色标注,得到标注链;
37、根据所述标注链进行点连续性分析,并对可合并的行驶点进行合并放置,对不可合并的行驶点进行单独放置;
38、基于所述第一行驶路线的合力,预设船舶行驶速度不变,获取所有的合并放置的行驶点以及相对应行驶点对应的路径长度,计算船舶第一避让回归时间,对船舶的第一避让回归时间最短的合并放置的行驶点所对应的转向角度进行标记,得到第一转向角度;
39、若所述第一转向角度的标记数量为1,则将所述第一转向角度作为最佳转向角度;
40、若所述第一转向角度的标记数量大于1,则将所述第一转向角度中转向角度最大的第一转向角度作为最佳转向角度;
41、基于最佳转向角度,预设船舶基于该转向角度避让障碍物,调整船舶行驶速度,且结合对应船舶行驶速度下的合并放置的行驶点以及对应行驶点的路径长度,计算船舶第二避让回归时间,对船舶的第二避让回归时间最短的合并放置的行驶点所对应的转向速度进行标记,得到第一转向速度;
42、若所述第一转向速度的标记数量为1,则将所述第一转向速度作为最佳转向速度;
43、若所述第一转向速度的标记数量大于1,则将所述第一转向速度中转向速度与船舶行驶速度相差最小的第一转向速度作为最佳转向速度;
44、基于最佳转向角度以及最佳转向速度,向合并放置的行驶点中的第一个点设置开始执行标签,且向在驶回到与该合并放置的最后一个行驶点存在相邻关系的另一组行驶点之间设置新执行标签;
45、基于所有标签设置结果,实现对所述第一行驶路线的优化,得到第二行驶路线。
46、优选的,基于所述第一行驶路线的合力,包括:计算所述第一行驶路线的合力f:
47、
48、其中,α为船舶与每个航路点之间的引力系数;di为船舶到第i个航路点的距离;β为船舶与每个静态障碍物之间的斥力系数;rj(m)为第j个静态障碍物的等效圆形障碍物模型的半径;θj为船舶避让第j个静态障碍物的转向角度;θi为船舶即将避让第j个静态障碍物在所对应的第i个航路点的航行区域中的航向;dj为船舶与第j个静态障碍物之间的距离;dj(m)为船舶与第j个静态障碍物之间的安全航行距离;dj(m)为第j个静态障碍物的斥力势场影响范围;dj为船舶避让第j个静态障碍物时与静态障碍物对应的航路点之间的距离;δ为船舶与每个动态干扰船舶之间的相对斥力系数;rl(n)为第l个动态干扰船舶的等效圆形障碍物模型的半径;vi为船舶在第i个航路点内的航速;vl为第l个动态干扰船舶在所对应的第个航路点的航行区域中的的航速;θl为船舶避让第l个动态干扰船舶的转向角度;dl为船舶与第l个动态干扰船舶之间的距离;dl(n)为船舶与第l个动态干扰船舶之间的安全航行距离;dl(n)为第l个动态干扰船舶的斥力势场影响范围;dl为船舶避让第l个动态干扰船舶时与与静态障碍物对应的航路点之间的距离;s为第一行驶路线中的航路点数量;m为第一行驶路线中的静态障碍物数量;n为第一行驶路线中的动态干扰船舶数量。
49、优选的,基于所述引力以及斥力,确定船舶的最佳转向角度以及最佳转向速度,对所述第一行驶路线进行优化,得到第二行驶路线之后,还包括:
50、获取船舶行驶点位置数据,若船舶行驶点位置数据与船舶目标点位置数据小于预设到达距离,则船舶已经行驶至第一行驶路线的目标点附近,结束对所述第一行驶路线的优化,得到第二行驶路线;
51、否则,继续实时获取船舶行驶点位置数据,确定船舶行驶剩余路线中的每个行驶点的引力以及斥力,对所述第一行驶路线继续进行优化,得到第二行驶路线。
52、本发明的其它特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。本发明的目的和其他优点可通过在所写的说明书、权利要求书、以及附图中所特别指出的结构来实现和获得。
53、下面通过附图和实施例,对本发明的技术方案做进一步的详细描述。
- 还没有人留言评论。精彩留言会获得点赞!