一种基于模糊逻辑的前馈参数自动调试方法、装置及介质与流程
本发明涉及自动控制领域,特别是涉及一种半导体封装设备的调试方法、装置及介质。
背景技术:
1、在精密运动控制系统中,尤其是在半导体封装设备中,如焊线机、贴片机,为保证高加速下的动态跟随性能,会引入前馈控制(ffc),前馈控制一般包含速度前馈和加速度前馈。目前,要设计一组较优的前馈控制参数,需要经验丰富的工程师调试;但这有以下两种弊端:1、随着设备产量的提高,如果采用人工调试的方法会耗费极大的人力和时间成本;2、设备往往被一线操作人员使用,他们往往不具备调试的能力。因此,在生产过程中,引入对于前馈参数的自动调试的方法显得尤为重要。
技术实现思路
1、本发明要解决的技术问题是为了克服现有技术中的缺陷,提供一种设备中基于模糊逻辑的前馈参数自动调试方法。
2、本发明是通过下述技术方案来解决上述技术问题:一种基于模糊逻辑的前馈参数自动调试方法,其特征在于,包括,
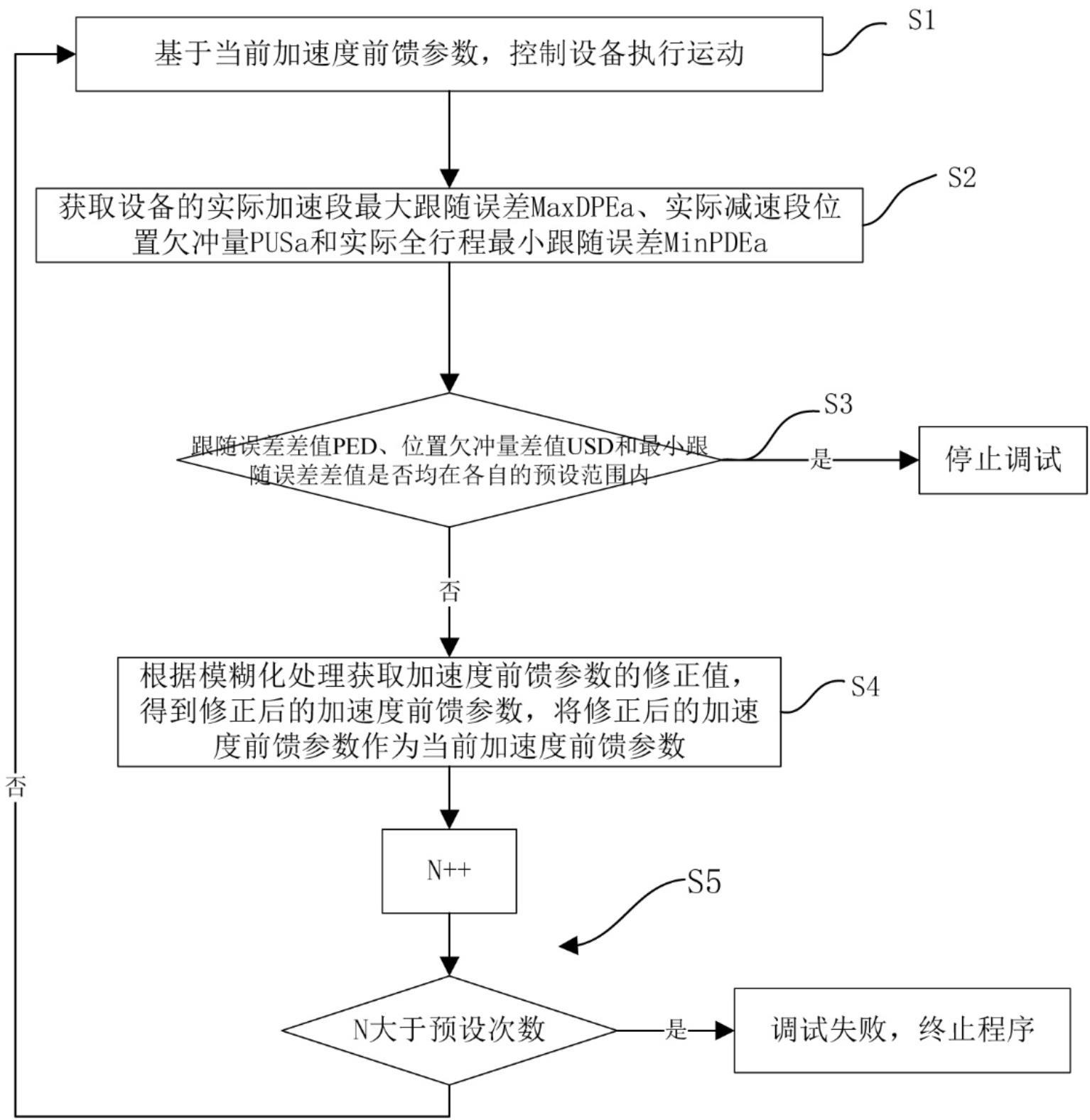
3、基于当前速度前馈参数和/或当前加速度前馈参数,控制设备执行运动,
4、判断跟随误差差值ped、位置欠冲量差值usd和最小跟随误差差值是否均在各自的预设范围内,
5、其中,所述跟随误差差值ped为实际加速段最大跟随误差maxdpea与目标加速段最大跟随误差maxdpet之间的差值,所述位置欠冲量差值usd为实际减速段位置欠冲量pusa与目标减速段位置欠冲量pust之间的差值,所述最小跟随误差差值为实际全行程最小跟随误差与目标全行程最小跟随误差之间的差值;
6、若否,则根据模糊化处理获取速度前馈参数的修正值和/或加速度前馈参数的修正值,得到修正后的速度前馈参数和/或加速度前馈参数,将修正后的速度前馈参数和/或加速度前馈参数作为当前速度前馈参数和/或当前加速度前馈参数;
7、重新开始控制设备执行运动,直至跟随误差差值ped、位置欠冲量差值usd和最小跟随误差差值均在各自的预设范围内,停止调试。
8、优选地,在重新开始控制设备执行运动前,将循环次数n加1,并且判断该循环次数是否超过预设次数,若否则继续,若是,则调试失败终止程序。
9、优选地,根据模糊化处理获取速度前馈参数和/或加速度前馈参数的修正值,具体包括,
10、通过二维查找表得到速度前馈参数的修正值和/或加速度前馈参数的修正值,
11、所述二维查找表为根据模糊化处理建立的输入跟随误差差值ped和位置欠冲量差值usd,输出为速度前馈参数的修正值δkv或加速度前馈参数的修正值δka的二维查找表。
12、优选地,得到修正后的速度前馈参数和/或加速度前馈参数,具体为根据以下公式,
13、kaff’=kaff+δka×kca;(1)
14、kvff’=kvff+δkv×kcv;(2)
15、其中,kaff为当前加速度前馈参数,δka为加速度前馈参数修正值,kca为加速度修正因子,kaff’为修正后的加速度前馈参数;
16、kvff为当前速度前馈参数,δkv为速度前馈参数修正值,kcv为速度修正因子,kvff’为修正后的速度前馈参数;
17、kca为低于kaff一个数量级的系数,kcv为低于kvff一个数量级的系数。
18、优选地,还包括根据模糊化处理建立输入为跟随误差差值ped和位置欠冲量差值usd,输出为速度前馈参数的修正值δkv或加速度前馈参数的修正值δka的二维查找表,具体包括,
19、基本论域的选择;
20、建立输入、输出变量的模糊子集;
21、建立模糊规则;
22、模糊推理与去模糊化得到查找表。
23、优选地,基本论域分为13个等级;
24、所述输入、输出变量的模糊子集定义为{负最大(nb) ,负中间值(nm),负最小(ns),零级(zo),正最小(ps),正中间值(pm),正最大(pb)},语言变量的隶属度函数选择梯形函数;
25、所述模糊规则为根据经验判断制定;
26、所述模糊推理和去模糊化采用重心法或最大隶属度法。
27、优选地,所述根据模糊化处理建立二维查找表还包括先控制设备在速度前馈参数和/或加速度前馈参数的最大范围内运行,获得判断跟随误差差值ped的最大范围和位置欠冲量差值usd的最大范围,进而将该范围划分成基本论域分为13个等级。
28、优选地,判断跟随误差差值ped、位置欠冲量差值usd和全行程最小跟随误差差值是否在各自的预设范围内,包括,
29、当判断跟随误差差值ped、位置欠冲量差值usd满足在各自的预设范围内,而全行程最小跟随误差差值不在对应的预设范围内时;
30、则增大目标加速段最大跟随误差maxdpet和目标减速段位置欠冲量pust,重新计算跟随误差差值ped和位置欠冲量差值usd。
31、本发明的另一方面,提供了一种基于模糊逻辑的前馈参数自动调试装置,其特征在于,包括,
32、控制模块,用于控制设备在当前速度前馈参数和/或当前加速度前馈参数运行;
33、第一获取模块,用于在设备运行后,获取设备的实际加速段最大跟随误差maxdpea、实际减速段位置欠冲量pusa和实际全行程最小跟随误差minpdea;
34、计算模块,用于计算跟随误差差值ped、位置欠冲量差值usd和最小跟随误差差值,
35、其中,所述跟随误差差值ped为实际加速段最大跟随误差maxdpea与目标加速段最大跟随误差maxdpet之间的差值,所述位置欠冲量差值usd为实际减速段位置欠冲量pusa与目标减速段位置欠冲量pust之间的差值,所述最小跟随误差差值为实际全行程最小跟随误差与目标全行程最小跟随误差之间的差值;
36、判断模块,用于判断跟随误差差值ped、位置欠冲量差值usd和最小跟随误差差值是否均在各自的预设范围内;
37、第二获取模块,用于根据模糊化处理获取速度前馈参数的修正值和/或加速度前馈参数的修正值;
38、修正模块,用于得到修正后的速度前馈参数和/或加速度前馈参数,将修正后的速度前馈参数和/或加速度前馈参数作为当前速度前馈参数和/或当前加速度前馈参数。
39、优选地,还包括循环保护模块,所述循环保护模块用于累加循环次数,并且判断是否大于预设次数。
40、优选地,所述第二获取模块包括,
41、查表模块,用于通过二维查找表得到速度前馈参数的修正值和/或加速度前馈参数的修正值;
42、所述二维查找表为根据模糊化处理建立的输入跟随误差差值ped和位置欠冲量差值usd,输出为速度前馈参数的修正值δkv或加速度前馈参数的修正值δka的二维查找表。
43、优选地,所述修正模块得到修正后的速度前馈参数和/或加速度前馈参数,具体为根据以下公式得到,
44、kaff’=kaff+δka×kca;(1)
45、kvff’=kvff+δkv×kcv;(2)
46、其中,kaff为当前加速度前馈参数,δka为加速度前馈参数修正值,kca为加速度修正因子,kaff’为修正后的加速度前馈参数;
47、kvff为当前速度前馈参数,δkv为速度前馈参数修正值,kcv为速度修正因子,kvff’为修正后的速度前馈参数;
48、kca为低于kaff一个数量级的系数,kcv为低于kvff一个数量级的系数。
49、优选地,还包括表格生成模块,所述表格生成模块,用于根据模糊化处理建立输入为跟随误差差值ped和位置欠冲量差值usd,输出为速度前馈参数的修正值δkv或加速度前馈参数的修正值δka的二维查找表;
50、所述表格生成模块包括基本论域选择模块;输入变量模糊子集建立模块;输出变量模糊子集建立模块;模糊规则建立模块;模糊推理和去模糊化模块。
51、优选地,所述表格生成模块还包括第三获取模块,用于当控制装置控制设备在速度前馈参数和/或加速度前馈参数的最大范围内运行时,获得判断跟随误差差值ped的最大范围和位置欠冲量差值usd的最大范围,供基本论域选择模块划分论域等级。
52、优选地,所述判断模块包括,
53、第一判断子模块,用于判断跟随误差差值ped是否在其预设范围内;
54、第二判断子模块,用于判断位置欠冲量差值usd是否在其预设范围内;
55、第三判断子模块,用于判断最小跟随误差差值是否在其预设范围内;
56、修改子模块,当第一、第二判断模块判断跟随误差差值ped、位置欠冲量差值usd满足在各自的预设范围内,第三判断模块判定最小跟随误差差值不在对应的预设范围内时,则增大目标加速段最大跟随误差maxdpet和目标减速段位置欠冲量pust。
57、本发明的又一方面,提供了一种电子设备,包括:
58、至少一个处理器;以及
59、与所述至少一个处理器通信连接的存储器;其中,
60、所述存储器存储有被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的方法。
61、本发明的又一方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行上述的方法。
62、本发明的积极进步效果在于:该基于模糊逻辑的前馈参数自动调试方法、装置及介质,能够根据模糊控制理论,从获取到的数据,自动查表得出需要调整的前馈参数的修正值进而对当前前馈参数进行迭代修正,再控制设备运动,调试效率高,自动调试方便,使得设备的运行性能更加稳定、优化。
- 还没有人留言评论。精彩留言会获得点赞!