一种用于提高全角半球谐振陀螺的控制回路带宽的方法
本发明属于智能化仪器仪表,尤其涉及一种用于提高全角半球谐振陀螺的控制回路带宽的方法。
背景技术:
1、半球谐振陀螺是一种哥式振动陀螺,半球谐振陀螺具有两种工作模式,分别为力平衡模式与全角模式。力平衡模式需要通过施加驱动力抵消哥式力对半球谐振子进动状态的影响,受限于力平衡回路的饱和作用,半球谐振陀螺的动态范围难以得到提高;而在全角模式下,谐振振型始终处于自由进动的状态,陀螺可以获得无限大的带宽,但控制回路的带宽会受限于外围电路以及控制策略。半球谐振陀螺控制策略关乎谐振陀螺仪能否保持在谐振频率处以稳定的幅度振荡工作,这是半球谐振陀螺仪正常工作的前提,其控制效果决定了控制回路带宽大小和陀螺仪精度的上限。全角半球谐振陀螺在经典比例积分(proportional-integral,pi)控制下可以实现静态和低速转动状态下的高精度测量,但陀螺仪高速转动时,pi控制器的跟踪效果不理想,难以继续使全角半球谐振陀螺保持高精度的工作。这种由陀螺仪转速引起的干扰信号呈现出正弦规律的变化,为了有效抑制正弦干扰项,在原有的pi控制基础上并联谐振控制组成比例积分谐振控制(proportional-integral-resonant,pir),对特定频率的谐波形成有效抑制同时不影响低频段的控制效果。
技术实现思路
1、为解决上述技术问题,本发明提出了一种用于提高全角半球谐振陀螺的控制回路带宽的方法,克服全角半球谐振陀螺高速转动时经典pi控制器跟踪效果不好问题,提高跟踪效果。
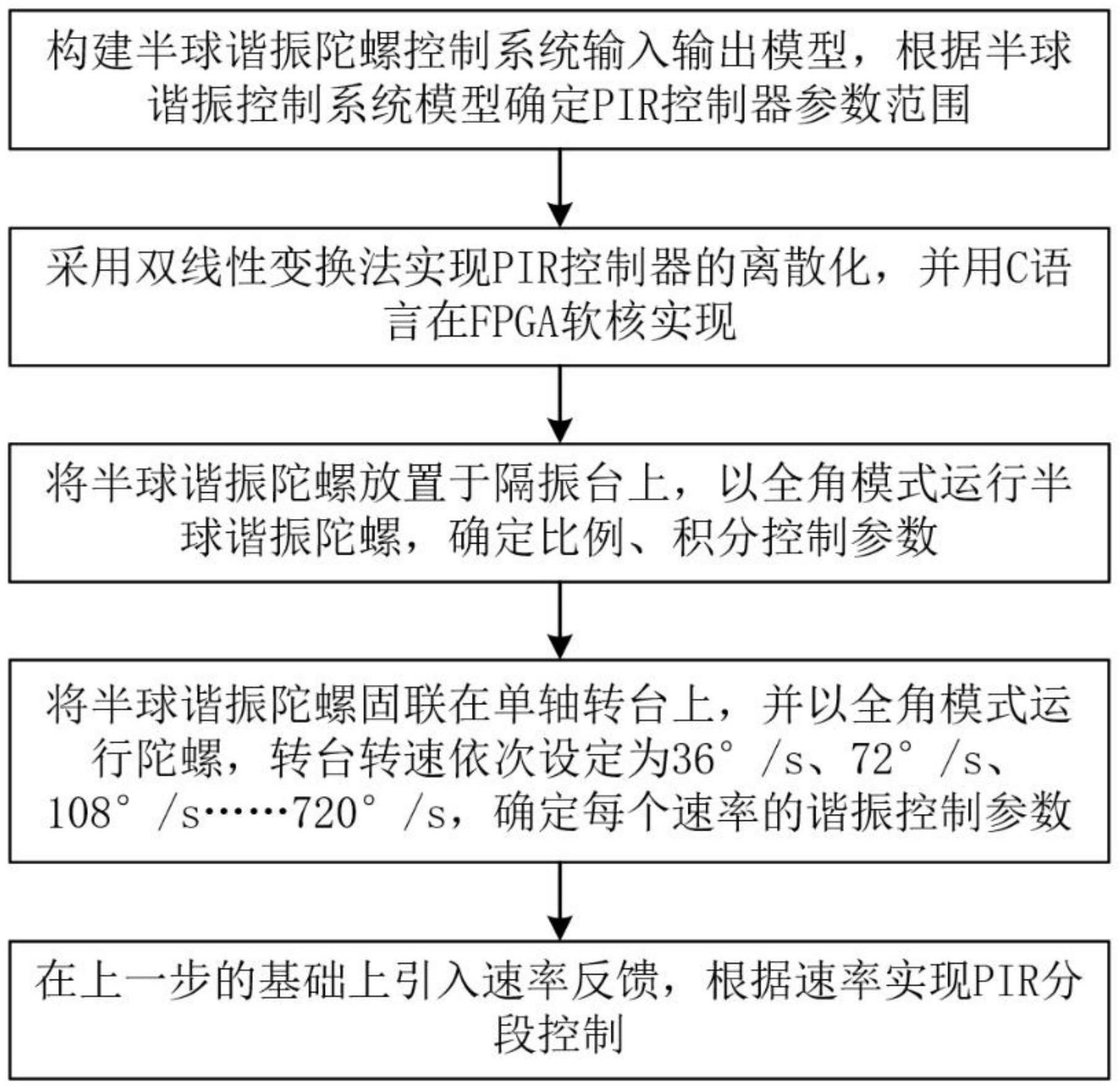
2、为实现上述目的,本发明提供了一种用于提高全角半球谐振陀螺的控制回路带宽的方法,包括以下步骤:
3、构建输入-输出控制系统模型,获取全角半球谐振陀螺控制系统被控对象;
4、基于所述被控对象,通过双线性变换法对控制器进行离散化处理;
5、对离散化处理后的所述控制器的若干参数进行标定,引入速度反馈提高全角半球谐振陀螺闭环控制回路的带宽。
6、可选的,构建输入-输出控制系统模型具体包括:
7、控制对象半球谐振子可建模为一阶惯性环节,整体增益有包含d/a转换及高压放大增益的驱动增益、包含滤波放大及a/d转换增益的检测增益以及椭圆参数解算增益。
8、可选的,获取全角半球谐振陀螺控制系统被控对象的方法包括:
9、
10、k=kdrivekhrgksensekpara
11、其中,g1(s)为全角半球谐振陀螺控制系统被控对象,k为陀螺控制系统总体增益,τ为时间常数,s为s域下的变量,kdrive为驱动环节增益,khrg为半球谐振子幅值增益,ksense为检测环节增益,kpara为椭圆参数解算环节增益。
12、可选的,所述控制器为经典pi控制器并联谐振控制组成pir控制器。
13、可选的,基于所述控制器获取传递函数的方法包括:
14、
15、其中,gpir(s)为传递函数,kp、ki、kr分别为比例、积分、谐振环节增益,ω0为谐振控制器的谐振频率,ωc为谐振控制器截止频率。
16、可选的,通过双线性变换法对控制器进行离散化处理的方法包括:
17、
18、其中,gpir(z)为z域下的传递函数,gpir(s)为s域下的传递函数,z为z域下的变量,s为s域下的变量,t为采样时间。
19、可选的,所述全角半球谐振陀螺控制系统包括:幅值控制、正交控制和频率控制。
20、可选的,对离散化处理后的所述控制器的若干参数进行标定,引入速率反馈提高全角半球谐振陀螺闭环控制回路的带宽的方法包括:
21、所述控制器的系数随着外部输入转速变化而变化,谐振控制中心频率始终跟踪外部转速的四倍频,有效抑制由转速引起的扰动,提高控制回路带宽。
22、本发明技术效果:本发明公开了一种用于提高全角半球谐振陀螺的控制回路带宽的方法,揭示了全角半球谐振陀螺转动引起扰动频率与转速存在特定关系,提出了通过抑制转动引起谐波干扰来提高控制回路带宽的方法。
技术特征:
1.一种用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,包括以下步骤:
2.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,构建输入-输出控制系统模型具体包括:
3.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,获取全角半球谐振陀螺控制系统被控对象的方法包括:
4.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,所述控制器为经典pi控制器并联谐振控制组成pir控制器。
5.如权利要求4所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,基于所述控制器获取传递函数的方法包括:
6.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,通过双线性变换法对控制器进行离散化处理的方法包括:
7.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,所述全角半球谐振陀螺控制系统包括:幅值控制、正交控制和频率控制。
8.如权利要求1所述的用于提高全角半球谐振陀螺的控制回路带宽的方法,其特征在于,对离散化处理后的所述控制器的若干参数进行标定,引入速率反馈提高全角半球谐振陀螺闭环控制回路的带宽的方法包括:
技术总结
本发明公开了一种用于提高全角半球谐振陀螺的控制回路带宽的方法,包括以下步骤:构建输入‑输出控制系统模型,获取全角半球谐振陀螺控制系统被控对象;基于所述被控对象,通过双线性变换法对控制器进行离散化处理;对离散化处理后的所述控制器的若干参数进行标定,引入速度反馈提高全角半球谐振陀螺闭环控制回路的带宽。本发明基于全角半球谐振陀螺转动引起扰动频率与转速存在特定关系,通过抑制转动引起谐波干扰提高全角半球谐振陀螺的控制回路带宽。
技术研发人员:郜中星,蒋丹,马燕,南方伯,崔浩宇,付雨鑫,于宗帅,赵聪宇
受保护的技术使用者:青岛哈尔滨工程大学创新发展中心
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!