隔空交互式雷达感应速度控制方法,控制系统及智能开关与流程
本发明涉及雷达感应控制,尤其是涉及一种隔空交互式雷达感应速度的中频信号处理控制方法,控制系统及智能开关。
背景技术:
1、传统雷达信息系统主要是基于fpga、dsp等硬件平台,开发的产品的成本高和应用的算法复杂,不适用于普通的消费者的照明产品中,基于fpga、dsp等硬件平台的射频感应产品,应用算法也比较复杂,需要mcu有很大的运算力,消费电子应用比较复杂。传统的触摸接触式的机械式开关,开关按键板的表面,在多人次触摸情况下,手部细菌容易通过开关板的不同人触摸,产生交叉感染,需要保洁人员多次用消毒液体进行擦洗,才能保证触摸开关按键板平面的干净卫生。
2、随着科技发展,出现了大量的非接触性的开关,例如红外线控制开关,原理是利用红外线发射波被遮挡,以及被反射的情况,来控制电路的开启和关闭。普通电工开关类产品和消费级控制开关,则通过采用的定频雷达波形式,对雷达感应开关感应范围内挥手动作/挥手速度,进行侦测和控制,隔空雷达射频速度感应控制电路也逐渐得到广泛应用。
3、非接触式雷达射频速度感应控制电路,可以很好解决、减少在公共场合,酒店,办公室,会议室,众创空间,孵化器等公共办公地方,因为触摸而交叉接触感染造成的困扰。同时也极大的提高使用操作的便利性,降低电工开关产品的硬件成本。相对来说,非触摸式的红外线感应技术的开关,本身技术先天具有一定缺陷,例如当使用人员因着装衣服颜色的关系,造成反射波被吸收,又或者当安装位置被阳光等高亮度光源照射时,或者当天气晴太冷,人员着装太厚,无法探测到人体辐射时,红外线传感器的感应灵敏度会下降,甚至无法进行开关工作。
技术实现思路
1、针对上述实际使用和现有产品的技术问题,本发明提出一种隔空交互式雷达感应速度的中频信号处理控制方法,控制系统及智能开关,基于雷达射频技术,采用非接触的隔空挥手动作,来控制开关的开/关动作。
2、具体的,本发明提供的一种隔空交互式雷达感应速度的控制方法,主要通过对感应速度变化的输出含速度变化信息的中频信号的处理以控制相应开关启动,所述方法包括:
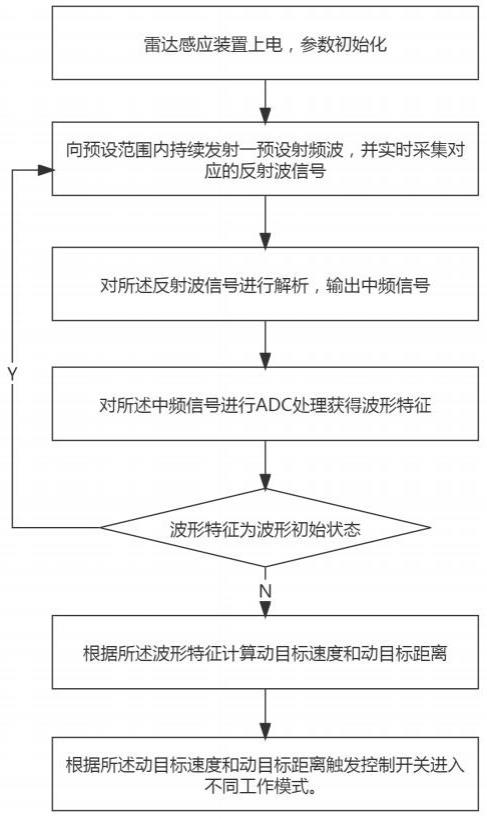
3、s1:向预设范围内持续发射一预设雷达射频波束,并实时采集对应的雷达反射波信号;
4、s2:对所述反射波信号进行低噪放解析,输出含速度变化信息的中频信号;
5、s3:对所述中频信号进行adc处理获得预定义的波形特征,若所述波形特征为波形初始状态,则返回s1;否则,则根据所述波形特征计算挥手动作目标速度和挥手动作时的目标距离;
6、s4:根据所述挥手动作目标速度和挥手动作时的目标距离触发控制开关进入不同工作模式;所述挥手动作为雷达天线设定的360°任意方向所发生的任意角度动作;
7、其中,所述挥手动作为任意方向所发生的任意动作,从而至少在一定程度上克服由于特定方向动作触发开关带来的限制,进而实现非接触式灵活地控制负载的开关状态,并且不受触发动作条件的影响,在特定范围内360度全向无死角感应。
8、在所述步骤s1之前,还包括:完成上电并进行参数初始化;所述参数初始化至少包括中频直流电压v,当前工作状态,波形最大值max,波形最小值min,信号波动范围值delta,波形时间t,感应门限th以及动目标频率h。
9、优选的,所述步骤s3中波形特征,具体包括:波形初始状态,由波峰到波谷状态以及由波谷到波峰状态。
10、其中,所述步骤s3中若所述波形特征为波形初始状态,具体包括:当所述波形特征小于中频直流电压v+信号波动范围值delta,或大于中频直流电压v-信号波动范围值delta,则判定当前波形特征为波形初始状态。
11、优选的,所述步骤s3中根据所述波形特征计算动目标速度,具体包括:
12、当所述波形特征大于中频直流电压v+信号波动范围值delta,则判定波形特征为由波峰到波谷状态;
13、当所述波形特征小于中频直流电压v+信号波动范围值delta,则判定波形特征为由波谷到波峰状态;
14、当波形特征为由波峰到波谷状态或波谷到波峰状态任一种时,则波形时间t开始计时,得到波形最大值max和波形最小值min,且当重新回到所述波形初始状态时,波形时间t暂停计时,根据波形时间t计算动目标的移动速度。
15、优选的,所述步骤s3中根据所述波形特征计算动目标距离,具体包括:
16、根据所述波形最大值max和波形最小值min,计算波形差值d;
17、判断所述波形差值d是否大于感应门限th,若大于,则感应距离符合预设范围;否则,不符合预设范围。
18、其中,本发明中所述步骤s4,具体包括:当感应距离符合预设范围,且波形时间t小于一个所述动目标频率h的周期时间,其中,一个周期时间等于动目标频率h的倒数。则输出端口的电平翻转,控制开关根据所述电平进行开或者关动作,同时触发指示感应灯同频开关。
19、每次完成上电并进行参数初始化后,控制开关默认切换至关动作,同时触发指示感应灯同频为关状态。由此可以保证每次断电或其他原因导致电路异常断路,在下一次上电时电路状态自动进入关闭状态,起到保护电路的同时减少资源浪费。
20、作为另一优选的,本发明还提供一种隔空交互式雷达感应的控制装置,所述控制装置至少包括:
21、感应雷达模块,安装于朝向预设感应区域侧,向预设范围内持续发射一雷达射频波束,并实时采集对应的反射波信号,用于感应预设范围内是否发生第一动作信息,所述第一动作信息为为任意方向所发生的任意动作产生的频波信息;
22、信号处理模块,用于对所述反射波信号进行低噪放解析,输出含速度变化信息的中频信号;
23、mcu处理模块,对所述中频信号进行adc处理获得预定义的波形特征,根据所述波形特征确定挥手动作目标速度和挥手动作时的目标距离;
24、以及开关控制模块,用于根据所述挥手动作目标速度和挥手动作时的目标距离触发进入不同工作模式。
25、所述控制装置还包括:指示感应灯,响应于所述开关控制模块的不同工作模式,同步触发进入对应工作状态。
26、所述信号处理模块可选的设置有第一拨码开关和第二拨码开关;第一拨码开关和第二拨码开关连接于感应雷达模块的外接电路上,通过不同电压的改变形式,控制输入至mcu对应串口的信号数据,以计算挥手动作目标速度和挥手动作时的目标距离。
27、作为另一优选的,本发明还提供一种智能开关,安装于任意负载端,用于控制所述负载端的电源控制,所述智能开关中设置有控制装置,所述控制装置用于实现预设电路逻辑在每次以一定速度挥手触发时,控制电路的打开,或者电路的关闭功能。
28、由此,通过本发明采用非接触的隔空挥手动作,来控制开关的开/关动作,在这个雷达感应系统上,硬件电路采用超小型化的模组尺寸设计,板载微带天线发射的电磁波,辐射到设定的空间范围内,通过发射tx和接收rx到的多普勒频率变化,通过射频芯片的解调,输出含速度变化信息的中频信号给mcu 进行处理。mcu接收到一定频率的中频信号后,通过adc转换,进行数字化积分和动作阈值,速度判断,以及信号灯指示灯处理过程。
29、由于雷达波束是360度全方向覆盖的,故此,挥手触发的角度可以是任意方向动作。挥手的速度是可以提前设定的。只有当某一个速度范围的挥手动作,才可以被雷达感应开关感应、接收和处理。
30、与现有技术相比,本发明实施例具有以下有益效果:
31、本发明的雷达波束感应方向,可以设计成大角度,360度全向无死角感应,通过阈值/感应距离控制,保证控制范围内的目标发生动作时,挥手动作可以被准确探测到。
32、本发明的mcu是一个8位的单片机,通过判断波形的变化和计算波形持续的时间,实现具有速度感知和判断动目标感应距离的功能。
- 还没有人留言评论。精彩留言会获得点赞!