一种超高堆垛机防摇摆的PLC运动曲线计算方法及控制系统与流程
本发明属于堆垛机电气控制,具体涉及一种超高堆垛机防摇摆的plc运动曲线计算方法及控制系统。
背景技术:
1、堆垛机运载系统目前广泛应用于自动化仓储物流中,在基于立体库结构的大空间多容量的仓储环境中,可以快速的进行货物在纵向与横向的转运操作,在提高多行业工厂生产调度效率的同时,也进一步提高了货物货物信息化与数字化存储能效并促进产业升级。但是由于立体库结构的仓储环境要求堆垛机设置有较高的立柱结构,而较高的立柱结构在实际货物运载过程中,将导致货物重心较高并出现货物运载抖动问题,从而在影响货物运输稳定性的同时,还降低了堆垛机立柱金属结构使用的稳定性与安全性。
2、公开号cn206544744u的中国专利,提供了一种高速堆垛机及其防抖动驱动机构,此专利中通过设置防抖驱动机构,用以在堆垛机高速或加速运动过程中维持堆垛机立柱的结构稳定性。但是此专利中通过结构改进进行的立柱防抖优化无法更好地解决货物运载过程中速度与加速度对金属结构的动态响应的问题,固定的结构组成无法解决多类型货物在不同速度下的动态运载模式。公开号为cn103293999a的中国专利,提供了一种涂层机开收卷稳定性的控制方法,此专利中通过设置plc控制器运算,根据不同的卷径大小调节不同的转速,从而进行货物运载的抖动控制。但是此专利中基于plc的调速控制是根据货物的不同属性提供不同的速度方案,而本发明中所述堆垛机转运的货物类别多种多样,需设置一套标准的plc控制方法以进行不同类别属性货物的统一防抖控制。
3、因此,针对现有的pcl防抖控制装置与控制方法中存在的问题,本发明中提供了一种超高堆垛机防摇摆的plc运动曲线计算方法及控制系统。
技术实现思路
1、针对上述存在的问题,本发明中第一方面提供了一种超高堆垛机防摇摆的plc运动曲线计算方法,具体包括堆垛机plc控制器中同步模式计算方法与等时模式计算方法;其中,针对高度在20-40米范围内的堆垛机立柱中,建立了水平轴x与起升轴y方向上的plc运动曲线,根据所述plc运动曲线通过降低重心进行堆垛机立柱摇摆控制。
2、优选的,所述plc运动曲线计算方法中,首先初始化参数并导入参数,所述导入参数包括水平轴x与起升轴y移动距离,预设堆垛机运载时间。
3、优选的,所述plc运动曲线计算方法中,判断移动距离是否大于预设参数值中的最小移动距离,同时判断预设参数中水平轴x与起升轴y的移动速度是否大于最小移动速度;若是,则继续进行plc运动曲线函数配置,若否则进入爬行模式后跳出plc运动曲线计算流程。
4、优选的,根据所述plc运动曲线函数配置,建立基于嵌套循环的计算流程,通过所述基于嵌套循环的计算流程,计算水平轴x与起升轴y在符合初始化参数设置下的控制参数。
5、优选的,根据所述控制参数,在堆垛机运载过程中选择同步模式计算方法与等时模式计算方法任一项,建立plc运动曲线进行堆垛机运载模式控制。
6、优选的,所述建立plc运动曲线中,对水平轴x与起升轴y的运行时间进行比较,其中以运行时间长的轴为主轴,以运行时间短的轴为从轴,首先进行主从轴确认操作。
7、优选的,所述同步模式计算方法中,首先进行主从轴确认操作,并计算主轴与从轴之间的时间差同时驱动主轴进行移动,当主轴与从轴之间的时间差不大于0时,再驱动从轴进行移动,循环控制直至主轴与从轴同时达到目标位置为止。
8、优选的,所述等时模式计算方法中,首先进行主从轴确认操作,其中从轴以主轴的运行时间为基准,结合从轴加速度计算并更新从轴移动速度,从而同时驱动主轴与从轴进行移动,反复调节直至主轴与从轴同时达到目标位置为止。
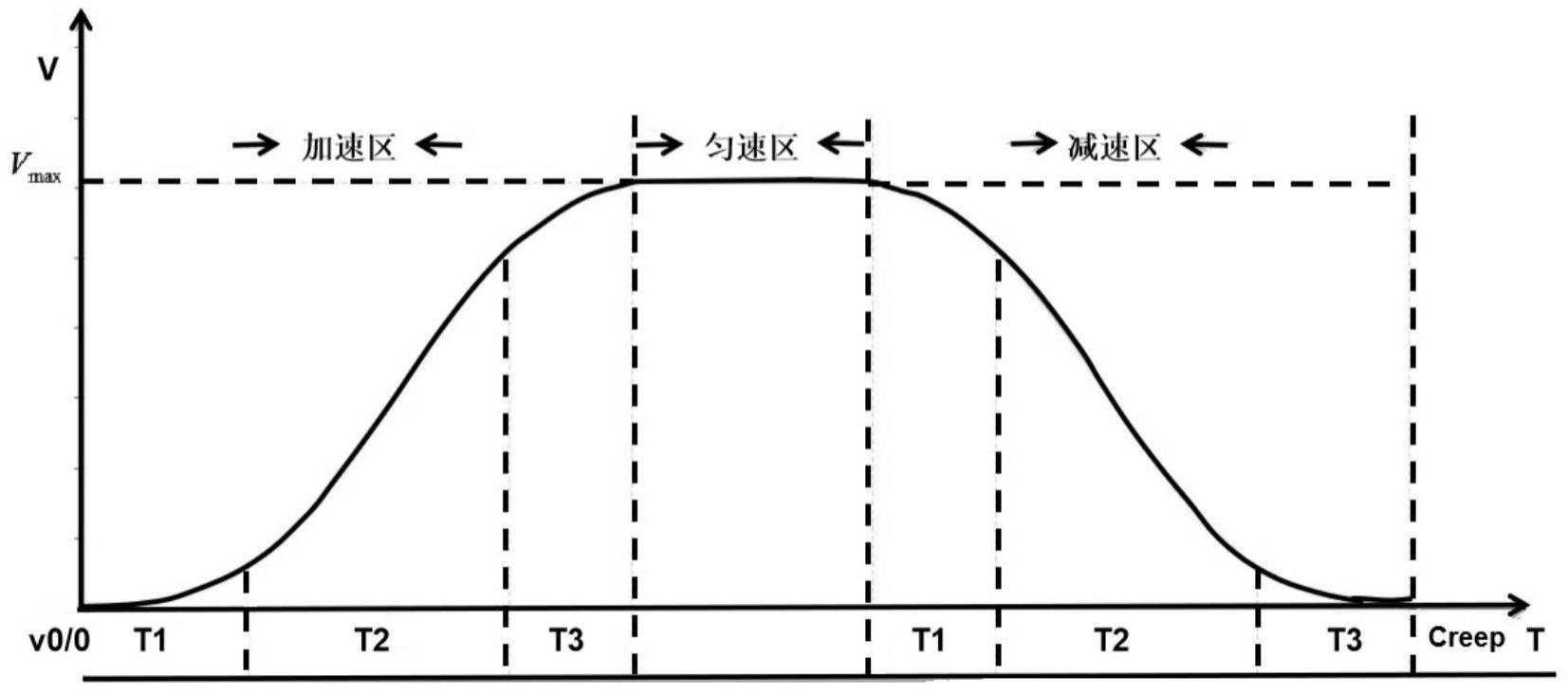
9、优选的,所述plc运动曲线以堆垛机运载时间与移动速度为基准建立坐标系,并根据堆垛机运载时间将plc运动曲线分为加速区,匀速区与减速区。
10、本发明中另一方面提供了一种超高堆垛机防摇摆的plc运动曲线计算控制系统,将所述plc运动曲线计算方法应用于plc运动曲线计算控制系统中,所述plc运动曲线计算控制系统中设置有plc控制器,所述plc控制器包括堆垛机运载数据采集模块,同步模式计算模块,等时模式计算模块与堆垛机运载控制执行模块。
11、与现有技术相比,本发明的有益效果在于:
12、(1)本发明中所提供的超高堆垛机防摇摆的plc运动曲线计算方法,用以更好地适应堆垛机在立体库结构下高仓储物流环境中的货物运载问题,对于20米发展到40米范围内的堆垛机货物运载的抖动问题进行进一步优化处理。
13、(2)在(1)的基础上,本发明通过建立同步模式计算方法,以控制起升轴y移动的上身与下降为主要运动控制方向,通过结合plc运动曲线模型,在起升轴y的运行速度达到允许移动速度时,将堆垛机所运载货物的重心尽量保持在低位,从而对堆垛机货物运载的抖动问题进行优化,并进一步提高堆垛机立柱金属结构使用的稳定性与安全性。
14、(3)在(2)的基础上,本发明通过建立等时模式计算方法,通过控制水平轴x和起升轴y在同时移动并同时到达目标位置,其中通过计算比较,以速度下计算得到的时间最长轴的移动速度作为基准降低另一个轴的移动速度,以此降低由动力响应带来的堆垛机摇摆问题,同时达到同步到达目标位置的效果。
15、(4)在(3)的基础上,本发明中所述plc运动曲线计算方法,可根据运载货物的质量与运载时间作为判断因素,进行同步模式计算方法与等时模式计算方法的选择性调用。
16、(5)在(4)的基础上,本发明中通过提供了一种超高堆垛机防摇摆的plc运动曲线计算控制系统,通过plc控制器控制水平轴x与起升轴y的运动参数,以此克服多种货物类别下的堆垛机货物运载的抖动问题,避免了固定的堆垛机结构改进无法解决多类型货物在不同速度下存在不同动态响应的问题。
技术特征:
1.一种超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,具体包括堆垛机plc控制器中同步模式计算方法与等时模式计算方法;其中,针对高度在20-40米范围内的堆垛机立柱中,建立了水平轴x与起升轴y方向上的plc运动曲线,根据所述plc运动曲线通过降低重心进行堆垛机立柱摇摆控制。
2.根据权利要求1所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述plc运动曲线计算方法中,首先初始化参数并导入参数,所述导入参数包括水平轴x与起升轴y移动距离,预设堆垛机运载时间。
3.根据权利要求1所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述plc运动曲线计算方法中,判断移动距离是否大于预设参数值中的最小移动距离,同时判断预设参数中水平轴x与起升轴y的移动速度是否大于最小移动速度;若是,则继续进行plc运动曲线函数配置,若否则进入爬行模式后跳出plc运动曲线计算流程。
4.根据权利要求2所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,根据所述plc运动曲线函数配置,建立基于嵌套循环的计算流程,通过所述基于嵌套循环的计算流程,计算水平轴x与起升轴y在符合初始化参数设置下的控制参数。
5.根据权利要求4所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,根据所述控制参数,在堆垛机运载过程中选择同步模式计算方法与等时模式计算方法任一项,建立plc运动曲线进行堆垛机运载模式控制。
6.根据权利要求5所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述建立plc运动曲线中,对水平轴x与起升轴y的运行时间进行比较,其中以运行时间长的轴为主轴,以运行时间短的轴为从轴,首先进行主从轴确认操作。
7.根据权利要求1所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述同步模式计算方法中,首先进行主从轴确认操作,并计算主轴与从轴之间的时间差同时驱动主轴进行移动,当主轴与从轴之间的时间差不大于0时,再驱动从轴进行移动,直至主轴与从轴同时达到目标位置为止。
8.根据权利要求1所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述等时模式计算方法中,首先进行主从轴确认操作,其中从轴以主轴的运行时间为基准,结合从轴加速度计算并更新从轴移动速度,从而同时驱动主轴与从轴进行移动,直至主轴与从轴同时达到目标位置为止。
9.根据权利要求1所述超高堆垛机防摇摆的plc运动曲线计算方法,其特征在于,所述plc运动曲线以堆垛机运载时间与移动速度为基准建立坐标系,并根据堆垛机运载时间将plc运动曲线分为加速区,匀速区与减速区。
10.一种超高堆垛机防摇摆的plc运动曲线计算控制系统,其特征在于,将所述plc运动曲线计算方法应用于plc运动曲线计算控制系统中,所述plc运动曲线计算控制系统中设置有plc控制器,所述plc控制器包括堆垛机运载数据采集模块,同步模式计算模块,等时模式计算模块与堆垛机运载控制执行模块。
技术总结
本发明属于堆垛机电气控制技术领域,具体涉及一种超高堆垛机防摇摆的PLC运动曲线计算方法及控制系统。本发明具体包括堆垛机PLC控制器中同步模式计算方法与等时模式计算方法;其中,针对高度在20‑40米范围内的堆垛机立柱中,建立了水平轴X与起升轴Y方向上的PLC运动曲线,根据所述PLC运动曲线通过降低重心进行堆垛机立柱摇摆控制。本发明中所提供的超高堆垛机防摇摆的PLC运动曲线计算方法,用以更好地适应堆垛机在立体库结构下高仓储物流环境中的货物运载问题,对于20米发展到40米范围内的堆垛机货物运载的抖动问题进行进一步优化处理。
技术研发人员:王维鹏
受保护的技术使用者:苏州迈卡格自动化设备有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!