一种基于强化学习的电力无人机拍摄航点自动规划方法与流程
本发明涉及电力无人机拍摄,尤其涉及一种基于强化学习的电力无人机拍摄航点自动规划方法。
背景技术:
1、传统的电网巡检方式是通过人工沿线路步行或借助交通工具,使用望远镜和红外热像仪等对线路设备进行近距离巡视与检测,具有巡线距离长、工作量大、步行巡线效率低等劣势,遇到冰雪水灾、地震、滑坡等自然灾害天气时,巡线工作难以正常开展。而电力无人机可以实现长时间续航,测量数据准确无误,即快又安全。
2、卫星图的时效性较差,地形地貌存在偏差;航拍图又受限于场地、天气、成本等原因,获取周期长,不利于工作开展;无人机大规模航拍,采集线路图像数据,采集的数据可用于对线路走廊、杆塔、导线的建模,同时可实现近距离精细化拍摄,采集技术也有倾斜摄影、激光点云一系列应用。电力无人机应用在线路规划中,可用于测绘电力通道的地形地貌,拥有更强的时效性和可实施性,要求条件低,更加灵活便捷。因此,我们提出一种基于强化学习的电力无人机拍摄航点自动规划方法。
技术实现思路
1、本发明的目的是解决现有电力无人机航拍技术没有提前制定航拍路线导致拍摄时间长,拍摄数据不准确,拍摄效率低,巡检成本增加,数据采集效率低等问题,而提出的一种基于强化学习的电力无人机拍摄航点自动规划方法。
2、为了实现上述目的,本发明采用了如下技术方案:
3、一种基于强化学习的电力无人机拍摄航点自动规划方法,包括以下步骤:
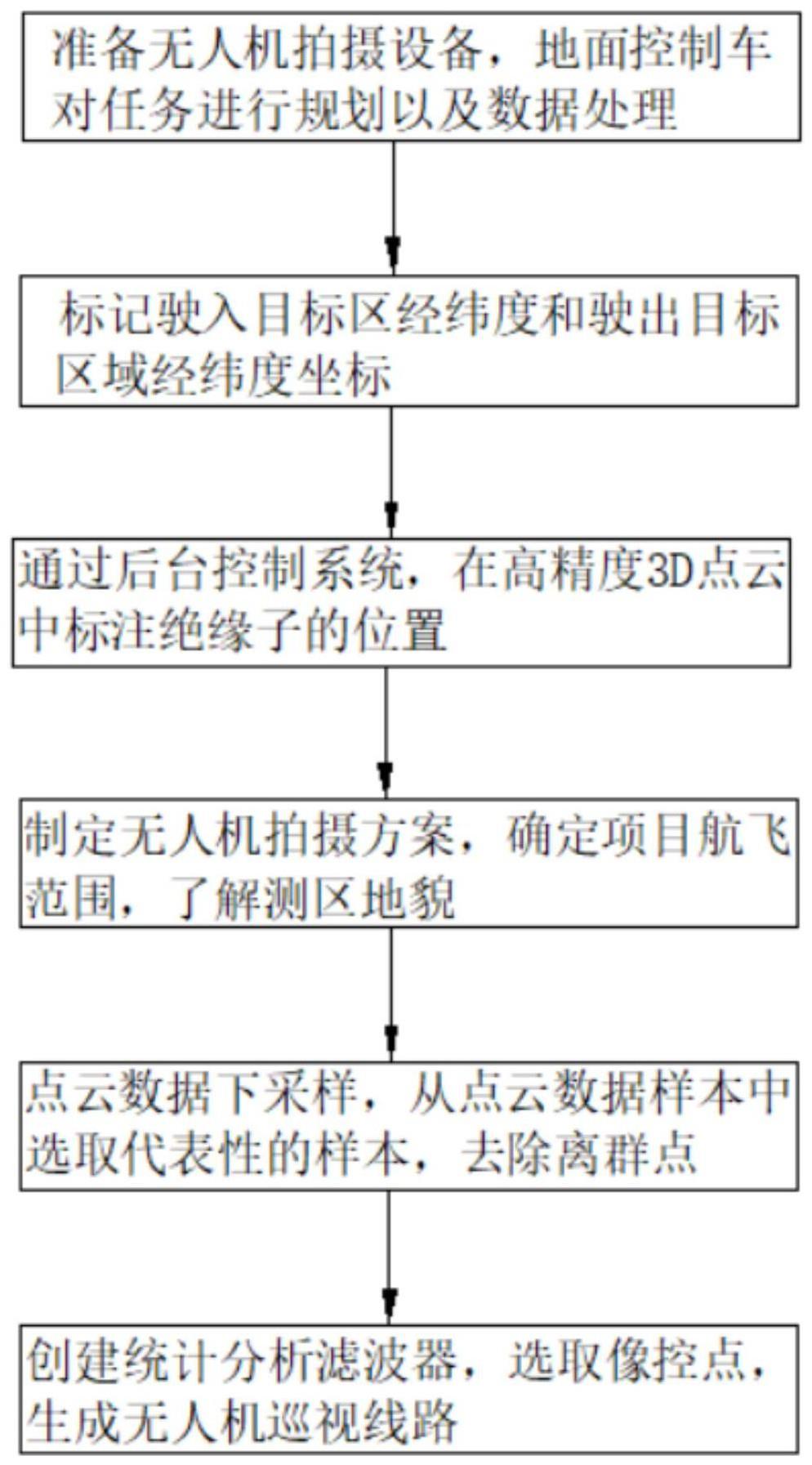
4、s1:准备无人机拍摄设备,地面控制车对任务进行规划以及数据处理;
5、s2:标记驶入目标区经纬度和驶出目标区域经纬度坐标;
6、s3:通过后台控制系统,在高精度3d点云中标注绝缘子的位置;
7、s4:制定无人机拍摄方案,确定项目航飞范围,了解测区地貌;
8、s5:点云数据下采样,从点云数据样本中选取代表性的样本,去除离群点;
9、s6:创建统计分析滤波器,选取像控点,生成无人机巡视线路。
10、优选的,所述s1中,电力无人机由无人机平台、光电任务载荷、数据链、以及地面控制车组成,无人机平台包括电力无人机机体和飞行控制航电设备;数据链包括机载数据链设备和地面数据链设备,地面控制车包括飞行控制、任务控制、任务规划以及数据处理。
11、优选的,所述s2中,驶入目标区经纬度坐标(l,b),驶出目标区域经纬度坐标(l′,b′),拍摄目标点经纬度(l″,b″),海拔高度为h,无人机在执行侦察任务时相对目标区域的高度为h,无人机围绕目标点作圆周飞行时的盘旋圆的半径为r。
12、优选的,所述s3中,分别将驶入目标区点、驶出目标区点和拍摄目标点经纬度坐标(l,b)、(l′,b′)以及(l″,b″)转换为平面直角坐标(x,y)、(x′,y′)以及(x″,y″),根据3点的位置计算出驶入目标区点至驶出目标区点的距离d,驶出目标区点和拍摄目标点的距离d。
13、优选的,所述s3中,工作人员通过后台控制系统,在高精度3d点云中标注绝缘子的位置,电力无人机在巡视线路中拍摄图像和视频的重要位置,后台系统通过自动航线规划和航线模型库组成的任务规划模块,自动规划出电力无人机飞行路径最短、转弯半径最优、最少辅助点的电力无人机巡检线路。
14、优选的,所述s4中,制定电力无人机拍摄方案,进行电网巡检时,根据航点进行拍摄采集;达到航点后,自动寻找和识别电网中的绝缘子,找准拍摄目标并调整云台角度使目标居中,根据拍摄距离自动调整焦距。
15、优选的,所述s4中,规划航线之前,确定项目航飞范围,了解测区地貌,并进行合理的飞行架次划分,优化航飞方案,根据测区相关资料对电力无人机系统性能进行评估,判断飞行环境是否满足飞机的飞行要求。
16、优选的,所述s5中,点云数据下采样,从大容量的点云数据样本中按一定规则选取具有代表性的样本来代替原来的大样本,去除点云的离群点,利用统计分析,从一个点云数据集中集中移除测量噪声点,对每个点的邻域进行统计分析,计算所有邻点的平均距离,根据高斯分布计算出一个均值μ和一个标准差σ,邻域点集中所有点与其邻域距离在区间之外的点被视为离群点,从点云数据中去除。
17、优选的,所述s6中,创建统计分析滤波器,设置对每个点分析的临近点的个数设置为50,并将标准差的倍数设置为1,对于超出平均距离加上一个标准差以上的点,标记为离群点,并将离群点移除。
18、优选的,所述s6中,选取像控点,根据测区范围统一布点,均匀、立体的布设在测区范围内,布设在同一位置的像控点应联测成平高点,像控点点位的分布,点位应尽量选在旁向重叠中线附近,离开方位线大于3cm时,分别布点,按照每段航带网的两端和中央的像主点,在其上下方向上旁向重叠范围内各布设一对平高点,每段航带网两端一对点间隔的基数段,像控点测量采用cors进行施测,信号较弱的地区采用gps静态测量模式,像控测量平面高程精度均不超过±0.02m,同一像控点观测3-5次,每次观测间隔60s,将两次观测成果平差,生成电力无人机巡视线路,电力无人机在规定位置进行拍照,根据设置好的巡视线路开始巡检工作。
19、本发明的有益效果为:
20、1、采用三维点云技术,采样点分布均匀,稳定性高,可以通过格点的尺寸控制点间距,提高数据采集效率与准确度,提高工作效率,计算效率高,通过几何特征区域的划分,使得采样结果抗噪性更强。
21、2、无人机巡视线路自动规划,巡检系统能在保证输电线路巡检作业安全性的前提下,提高线路巡检精度、效率并有效降低巡检成本。
22、本发明的目的是通过采用三维点云技术,提高了数据采集效率与准确度,提高工作效率,计算效率高,基于历史航拍点数据及三维点云数据自动识别拍摄目标,在无人机飞行前自动规划拍摄航点,提高线路巡检精度和效率并有效降低巡检成本,多航线任务规划、任务分配等子系统协调配合,保证各无人机之间的任务分配合理、高效,通过优化航线实现无人机以最短时间完成目标任务,大大提升了电力无人机巡检效率。
技术特征:
1.一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s1中,电力无人机由无人机平台、光电任务载荷、数据链、以及地面控制车组成,无人机平台包括电力无人机机体和飞行控制航电设备;数据链包括机载数据链设备和地面数据链设备,地面控制车包括飞行控制、任务控制、任务规划以及数据处理。
3.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s2中,驶入目标区经纬度坐标(l,b),驶出目标区域经纬度坐标(l′,b′),拍摄目标点经纬度(l″,b″),海拔高度为h,无人机在执行侦察任务时相对目标区域的高度为h,无人机围绕目标点作圆周飞行时的盘旋圆的半径为r。
4.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s3中,分别将驶入目标区点、驶出目标区点和拍摄目标点经纬度坐标(l,b)、(l′,b′)以及(l″,b″)转换为平面直角坐标(x,y)、(x′,y′)以及(x″,y″),根据3点的位置计算出驶入目标区点至驶出目标区点的距离d,驶出目标区点和拍摄目标点的距离d。
5.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s3中,工作人员通过后台控制系统,在高精度3d点云中标注绝缘子的位置,电力无人机在巡视线路中拍摄图像和视频的重要位置,后台系统通过自动航线规划和航线模型库组成的任务规划模块,自动规划出电力无人机飞行路径最短、转弯半径最优、最少辅助点的电力无人机巡检线路。
6.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s4中,制定电力无人机拍摄方案,进行电网巡检时,根据航点进行拍摄采集;达到航点后,自动寻找和识别电网中的绝缘子,找准拍摄目标并调整云台角度使目标居中,根据拍摄距离自动调整焦距。
7.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s4中,规划航线之前,确定项目航飞范围,了解测区地貌,并进行合理的飞行架次划分,优化航飞方案,根据测区相关资料对电力无人机系统性能进行评估,判断飞行环境是否满足飞机的飞行要求。
8.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s5中,点云数据下采样,从大容量的点云数据样本中按一定规则选取具有代表性的样本来代替原来的大样本,去除点云的离群点,利用统计分析,从一个点云数据集中集中移除测量噪声点,对每个点的邻域进行统计分析,计算所有邻点的平均距离,根据高斯分布计算出一个均值μ和一个标准差σ,邻域点集中所有点与其邻域距离在区间之外的点被视为离群点,从点云数据中去除。
9.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s6中,创建统计分析滤波器,设置对每个点分析的临近点的个数设置为50,并将标准差的倍数设置为1,对于超出平均距离加上一个标准差以上的点,标记为离群点,并将离群点移除。
10.根据权利要求1所述的一种基于强化学习的电力无人机拍摄航点自动规划方法,其特征在于,所述s6中,选取像控点,根据测区范围统一布点,均匀、立体的布设在测区范围内,布设在同一位置的像控点应联测成平高点,像控点点位的分布,点位应尽量选在旁向重叠中线附近,离开方位线大于3cm时,分别布点,按照每段航带网的两端和中央的像主点,在其上下方向上旁向重叠范围内各布设一对平高点,每段航带网两端一对点间隔的基数段,像控点测量采用cors进行施测,信号较弱的地区采用gps静态测量模式,像控测量平面高程精度均不超过±0.02m,同一像控点观测3-5次,每次观测间隔60s,将两次观测成果平差,生成电力无人机巡视线路,电力无人机在规定位置进行拍照,根据设置好的巡视线路开始巡检工作。
技术总结
本发明涉及电力无人机拍摄技术领域,尤其涉及一种基于强化学习的电力无人机拍摄航点自动规划方法,针对现有电力无人机航拍技术没有提前制定航拍路线导致拍摄时间长,拍摄数据不准确,拍摄效率低,巡检成本增加,数据采集效率低等问题,现提出如下方案,包括以下步骤:S1:准备无人机拍摄设备;本发明的目的是通过采用三维点云技术,提高数据采集效率与准确度,提高工作效率,计算效率高,基于历史航拍点数据及三维点云数据自动识别拍摄目标,在无人机飞行前自动规划拍摄航点,提高线路巡检精度和效率并有效降低巡检成本,通过优化航线实现无人机以最短时间完成目标任务,大大提升电力无人机巡检效率。
技术研发人员:刘宇舜,甄超,魏敏,操松元,林世忠,阴酉龙,孙飞,姚义,孔伟伟,王维佳,程昊铭,姚天杨,尚守卫,张勇,张茂凯
受保护的技术使用者:国网安徽省电力有限公司电力科学研究院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!