无人机控制方法、装置、计算机设备和存储介质与流程
本技术涉及飞行器控制,特别是涉及一种无人机控制方法、装置、计算机设备、存储介质和计算机程序产品。
背景技术:
1、随着电力行业的蓬勃发展,使用无人机来执行电力巡检任务的地市越来越多。由于无人机在电力巡检方面有着执行效率高、节省人力资源、缺陷定位精准等特点,因此利用无人机做精细化巡检已越发普及。利用无人机来执行精细化巡检任务的过程中,需通过上传航线任务至无人机,从而控制无人机来完成航线任务。
2、现有的无人机控制方法,往往每次仅能上传单次航线任务,再次上传的航线任务将会覆盖当次上传的任务。在巡检任务较多的情况下,每次上传单次航线任务都会比较耗时且操作步骤较多,存在航线任务执行效率低的问题。
技术实现思路
1、基于此,有必要针对上述航线任务执行效率低的问题,提供一种能够提高航线任务执行效率的无人机控制方法、装置、计算机设备、计算机可读存储介质和计算机程序产品。
2、第一方面,本技术提供了一种无人机控制方法。所述方法包括:
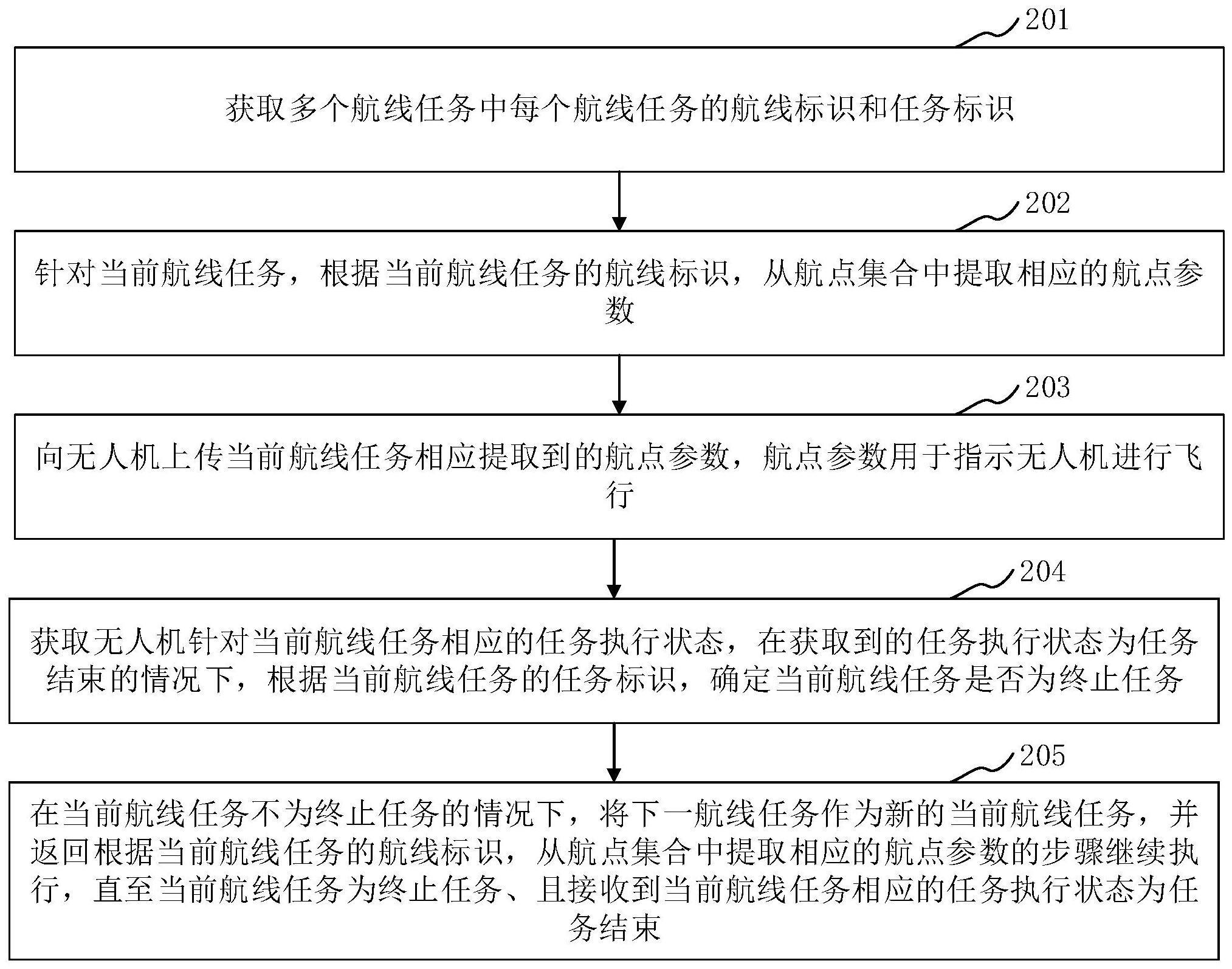
3、获取多个航线任务中每个航线任务的航线标识和任务标识;
4、针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数;
5、向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行;
6、获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务;
7、在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。
8、在其中一个实施例中,航点参数对应于航点,不同航点之间具有航点顺序;向无人机上传当前航线任务相应提取到的航点参数,包括:
9、根据当前航线任务中各航点间的航点顺序,将当前航线任务中各航点对应的航点参数依次添加至缓存队列中;
10、从缓存队列中依次取出各航点参数,并上传至无人机。
11、在其中一个实施例中,获取无人机针对当前航线任务相应的任务执行状态,包括:
12、监听无人机的任务执行状态,基于监听结果,获取无人机针对当前航线任务相应的任务执行状态。
13、在其中一个实施例中,任务标识至少分为终止任务标识和非终止任务标识;根据当前航线任务的任务标识,确定当前航线任务是否为终止任务,包括:
14、在当前航线任务的任务标识为非终止任务标识的情况下,确定当前航线任务不为终止任务;
15、在当前航线任务的任务标识为终止任务标识的情况下,确定当前航线任务为终止任务。
16、在其中一个实施例中,无人机控制方法还包括:
17、在当前航线任务不为终止任务、且无人机飞行至当前航线任务中最后一个航点相应位置处的情况下,控制并保持无人机悬停,直至无人机执行下一航线任务;
18、在当前航线任务为终止任务、且无人机飞行至当前航线任务中最后一个航点相应位置处的情况下,控制无人机返航。
19、在其中一个实施例中,航点集合的生成步骤,包括:
20、获取多个待执行航线任务和相应每个待执行航线任务的目标航线标识;
21、对多个待执行航线任务分别进行解析,得到多个待执行航线任务各自对应的航点参数;
22、将多个待执行航线各自对应的航点参数和目标航线标识,添加至初始集合中,得到航点集合。
23、第二方面,本技术还提供了一种无人机控制装置。所述装置包括:
24、获取模块,用于获取多个航线任务中每个航线任务的航线标识和任务标识;
25、提取模块,用于针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数;
26、上传模块,用于向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行;
27、确定模块,用于获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务;
28、执行模块,用于在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。
29、第三方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现以下步骤:
30、获取多个航线任务中每个航线任务的航线标识和任务标识;
31、针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数;
32、向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行;
33、获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务;
34、在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。
35、第四方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现以下步骤:
36、获取多个航线任务中每个航线任务的航线标识和任务标识;
37、针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数;
38、向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行;
39、获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务;
40、在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。
41、第五方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现以下步骤:
42、获取多个航线任务中每个航线任务的航线标识和任务标识;
43、针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数;
44、向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行;
45、获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务;
46、在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。
47、上述无人机控制方法、装置、计算机设备、存储介质和计算机程序产品,通过获取多个航线任务中每个航线任务的航线标识和任务标识,针对当前航线任务,根据当前航线任务的航线标识,从航点集合中提取相应的航点参数。向无人机上传当前航线任务相应提取到的航点参数,航点参数用于指示无人机进行飞行。获取无人机针对当前航线任务相应的任务执行状态,在获取到的任务执行状态为任务结束的情况下,根据当前航线任务的任务标识,确定当前航线任务是否为终止任务,在当前航线任务不为终止任务的情况下,将下一航线任务作为新的当前航线任务,并返回根据当前航线任务的航线标识,从航点集合中提取相应的航点参数的步骤继续执行,直至当前航线任务为终止任务、且接收到当前航线任务相应的任务执行状态为任务结束。上述方案,通过对多个航线任务中每个航线任务,根据航线标识从航点集合中提取相应的航点参数,从而指示无人机按照相应的航点参数飞行,在当前航线任务的任务执行状态为任务结束,且当前航线任务不为终止任务的情况下,继续执行下一航线任务,直到当前航线任务为终止任务、且当前航线任务的任务执行状态为任务结束,实现了无人机在每次执行单个航线任务的情况下,能够自动连续执行多个航线任务,提高了无人机的航线任务执行效率。
- 还没有人留言评论。精彩留言会获得点赞!