基于多源遥感数据的无人机最优降落点确定方法及设备
本发明实施例涉及卫星遥感,尤其涉及一种基于多源遥感数据的无人机最优降落点确定方法及设备。
背景技术:
1、传统巡检多采用人工巡逻方式,结合了部分无人机巡检试验。存在巡检不到位、遗漏巡检点,数据保存不完整、不准确、数据丢失、遗漏等严重问题。发现隐患点,不能及时上报,隐患地点、情况描述不清楚,无法对隐患及时做出处理,由小隐患积累成大事故,造成直接危害和财产损失。
2、在对无人机移动机场关键技术研究升级的基础上,创造性地将自动驾驶机器人与无人机机巢相结合,使用全无人机器人搭载无人机机巢,将单台无人机精细化巡检的最大距离扩大到机器人的行驶范围,从而实现全无人长距离精细化巡检,在林业、农业、交通、边防、电力、地质等多个领域有广阔的应用前景。由于自动驾驶机器人处于不断运动当中,以前的固定机场无人机降落算法显然不再适用,而是要考虑到位置动态变化过程中身处的环境也在变化,即无人机的降落条件也在不断变化,这时就需要新的算法。因此,开发一种基于多源遥感数据的无人机最优降落点确定方法及设备,可以有效克服上述相关技术中的缺陷,就成为业界亟待解决的技术问题。
技术实现思路
1、针对现有技术存在的上述问题,本发明实施例提供了一种基于多源遥感数据的无人机最优降落点确定方法及设备。
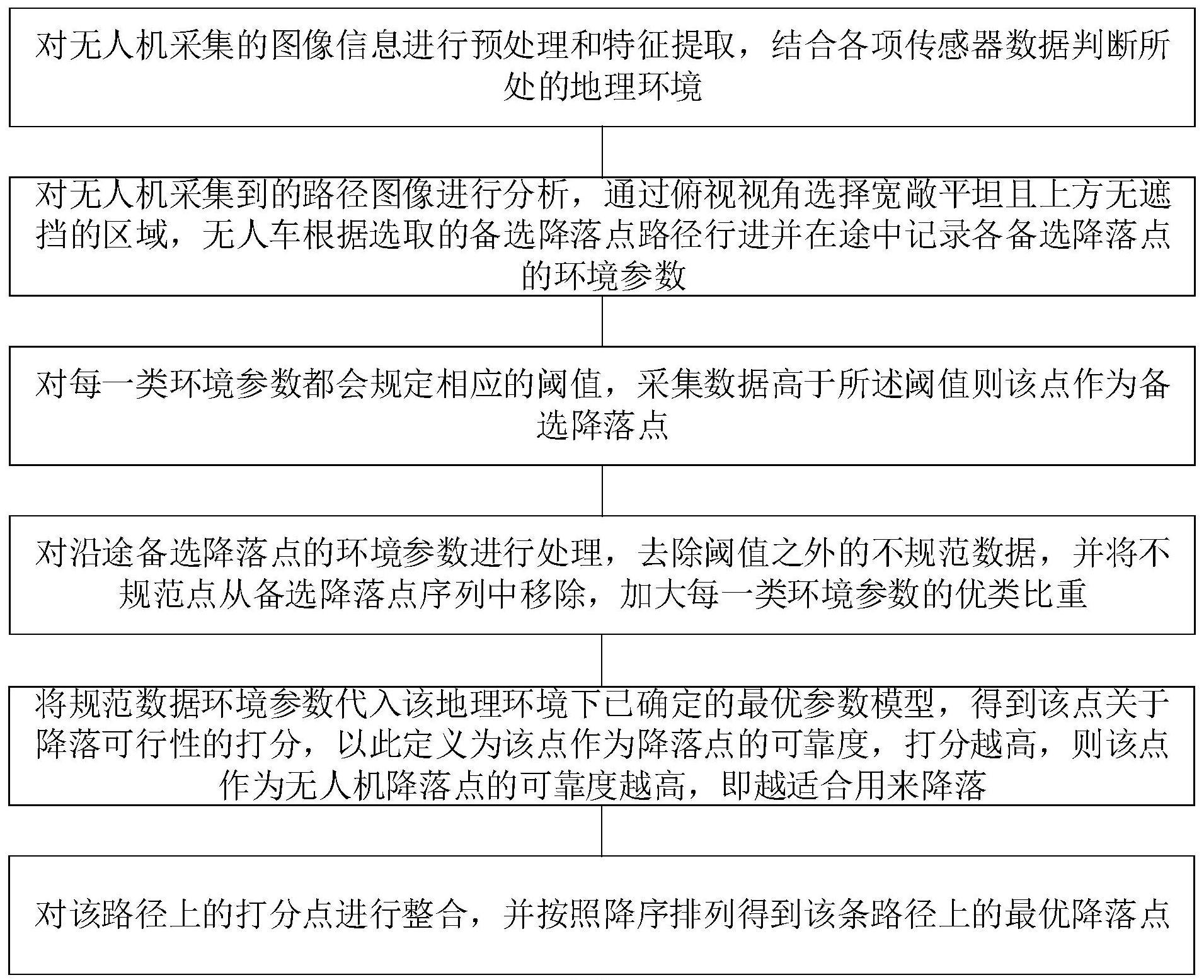
2、第一方面,本发明的实施例提供了一种基于多源遥感数据的无人机最优降落点确定方法,包括:对无人机采集的图像信息进行预处理和特征提取,结合各项传感器数据判断所处的地理环境;对无人机采集到的路径图像进行分析,通过俯视视角选择宽敞平坦且上方无遮挡的区域,无人车根据选取的备选降落点路径行进并在途中记录各备选降落点的环境参数;对每一类环境参数都会规定相应的阈值,采集数据高于所述阈值则该点作为备选降落点;对沿途备选降落点的环境参数进行处理,去除阈值之外的不规范数据,并将不规范点从备选降落点序列中移除,加大每一类环境参数的优类比重;将规范数据环境参数代入该地理环境下已确定的最优参数模型,得到该点关于降落可行性的打分,以此定义为该点作为降落点的可靠度,打分越高,则该点作为无人机降落点的可靠度越高,即越适合用来降落;对该路径上的打分点进行整合,并按照降序排列得到该条路径上的最优降落点。
3、在上述方法实施例内容的基础上,本发明实施例中提供的基于多源遥感数据的无人机最优降落点确定方法,所述各备选降落点的环境参数,包括:坡度、湿度、温度、植被覆盖度、风速、光照和碎石情况。
4、在上述方法实施例内容的基础上,本发明实施例中提供的基于多源遥感数据的无人机最优降落点确定方法,所述加大每一类环境参数的优类比重,包括:对每一类环境参数的所有数值求取平均值,再将备选降落点的各类环境参数数值与其分别比较,大于等于平均值百分之五十的备选降落点获得额外百分之三十的加分,加大优秀参数的比重。
5、在上述方法实施例内容的基础上,本发明实施例中提供的基于多源遥感数据的无人机最优降落点确定方法,所述最优参数模型的建立包括:对巡检目标地貌条件进行模拟,取两类模拟点:适宜降落模拟点和不适宜降落模拟点,并将所有模拟点乱序排列,得到多种地理条件下的模拟点数据,作为模型的训练集;对各种地理条件下的环境参数进行设置,按照其特性赋予其离散化或连续化,并使之不断变化;将模拟训练集代入变权重的参数算法中,寻找最大距离的分隔超平面,即一组的分类效果最好,正确性最高,则可靠性越高;得出的参数权重组合是该地理条件下的最优权重组,用于建立该地貌条件下的最优参数模型。
6、第二方面,本发明的实施例提供了一种基于多源遥感数据的无人机最优降落点确定装置,包括:第一主模块,用于实现对无人机采集的图像信息进行预处理和特征提取,结合各项传感器数据判断所处的地理环境;第二主模块,用于实现对无人机采集到的路径图像进行分析,通过俯视视角选择宽敞平坦且上方无遮挡的区域,无人车根据选取的备选降落点路径行进并在途中记录各备选降落点的环境参数;第三主模块,用于实现对每一类环境参数都会规定相应的阈值,采集数据高于所述阈值则该点作为备选降落点;第四主模块,用于实现对沿途备选降落点的环境参数进行处理,去除阈值之外的不规范数据,并将不规范点从备选降落点序列中移除,加大每一类环境参数的优类比重;第五主模块,用于实现将规范数据环境参数代入该地理环境下已确定的最优参数模型,得到该点关于降落可行性的打分,以此定义为该点作为降落点的可靠度,打分越高,则该点作为无人机降落点的可靠度越高,即越适合用来降落;第六主模块,用于实现对该路径上的打分点进行整合,并按照降序排列得到该条路径上的最优降落点。
7、第三方面,本发明的实施例提供了一种电子设备,包括:
8、至少一个处理器;以及
9、与处理器通信连接的至少一个存储器,其中:
10、存储器存储有可被处理器执行的程序指令,处理器调用程序指令能够执行第一方面的各种实现方式中任一种实现方式所提供的基于多源遥感数据的无人机最优降落点确定方法。
11、第四方面,本发明的实施例提供了一种非暂态计算机可读存储介质,非暂态计算机可读存储介质存储计算机指令,计算机指令使计算机执行第一方面的各种实现方式中任一种实现方式所提供的基于多源遥感数据的无人机最优降落点确定方法。
12、本发明实施例提供的基于多源遥感数据的无人机最优降落点确定方法及设备,可以根据环境的不同动态调整算法,用于计算和筛选降落点;在山林、平原等偏远地区能够实现全自动化巡检,避免过多人力资源的浪费;在运行时也可以通过智能车底盘和无人机同时多角度收集数据,以便后期更优化的调整和工作。
技术特征:
1.一种基于多源遥感数据的无人机最优降落点确定方法,其特征在于,包括:对无人机采集的图像信息进行预处理和特征提取,结合各项传感器数据判断所处的地理环境;对无人机采集到的路径图像进行分析,通过俯视视角选择宽敞平坦且上方无遮挡的区域,无人车根据选取的备选降落点路径行进并在途中记录各备选降落点的环境参数;对每一类环境参数都会规定相应的阈值,采集数据高于所述阈值则该点作为备选降落点;对沿途备选降落点的环境参数进行处理,去除阈值之外的不规范数据,并将不规范点从备选降落点序列中移除,加大每一类环境参数的优类比重;将规范数据环境参数代入该地理环境下已确定的最优参数模型,得到该点关于降落可行性的打分,以此定义为该点作为降落点的可靠度,打分越高,则该点作为无人机降落点的可靠度越高,即越适合用来降落;对该路径上的打分点进行整合,并按照降序排列得到该条路径上的最优降落点。
2.根据权利要求1所述的基于多源遥感数据的无人机最优降落点确定方法,其特征在于,所述各备选降落点的环境参数,包括:坡度、湿度、温度、植被覆盖度、风速、光照和碎石情况。
3.根据权利要求2所述的基于多源遥感数据的无人机最优降落点确定方法,其特征在于,所述加大每一类环境参数的优类比重,包括:对每一类环境参数的所有数值求取平均值,再将备选降落点的各类环境参数数值与其分别比较,大于等于平均值百分之五十的备选降落点获得额外百分之三十的加分,加大优秀参数的比重。
4.根据权利要求3所述的基于多源遥感数据的无人机最优降落点确定方法,其特征在于,所述最优参数模型的建立包括:对巡检目标地貌条件进行模拟,取两类模拟点:适宜降落模拟点和不适宜降落模拟点,并将所有模拟点乱序排列,得到多种地理条件下的模拟点数据,作为模型的训练集;对各种地理条件下的环境参数进行设置,按照其特性赋予其离散化或连续化,并使之不断变化;将模拟训练集代入变权重的参数算法中,寻找最大距离的分隔超平面,即一组的分类效果最好,正确性最高,则可靠性越高;得出的参数权重组合是该地理条件下的最优权重组,用于建立该地貌条件下的最优参数模型。
5.一种基于多源遥感数据的无人机最优降落点确定装置,其特征在于,包括:第一主模块,用于实现对无人机采集的图像信息进行预处理和特征提取,结合各项传感器数据判断所处的地理环境;第二主模块,用于实现对无人机采集到的路径图像进行分析,通过俯视视角选择宽敞平坦且上方无遮挡的区域,无人车根据选取的备选降落点路径行进并在途中记录各备选降落点的环境参数;第三主模块,用于实现对每一类环境参数都会规定相应的阈值,采集数据高于所述阈值则该点作为备选降落点;第四主模块,用于实现对沿途备选降落点的环境参数进行处理,去除阈值之外的不规范数据,并将不规范点从备选降落点序列中移除,加大每一类环境参数的优类比重;第五主模块,用于实现将规范数据环境参数代入该地理环境下已确定的最优参数模型,得到该点关于降落可行性的打分,以此定义为该点作为降落点的可靠度,打分越高,则该点作为无人机降落点的可靠度越高,即越适合用来降落;第六主模块,用于实现对该路径上的打分点进行整合,并按照降序排列得到该条路径上的最优降落点。
6.一种电子设备,其特征在于,包括:
7.一种非暂态计算机可读存储介质,其特征在于,所述非暂态计算机可读存储介质存储计算机指令,所述计算机指令使所述计算机执行权利要求1至4中任一项权利要求所述的方法。
技术总结
本发明提供了一种基于多源遥感数据的无人机最优降落点确定方法及设备,包括:对无人机采集的图像信息进行预处理和特征提取,结合各项传感器数据判断所处的地理环境;对无人机采集到的路径图像进行分析,通过俯视视角选择宽敞平坦且上方无遮挡的区域,记录各备选降落点的环境参数;对每一类环境参数都会规定相应的阈值,采集数据高于阈值则该点作为备选降落点;对沿途备选降落点的环境参数进行处理;将规范数据环境参数代入该地理环境下已确定的最优参数模型,得到该点关于降落可行性的打分,定义该点作为降落点的可靠度;得到该条路径上的最优降落点。本发明通过智能车底盘和无人机同时多角度收集数据,便于后期更优化的调整和工作。
技术研发人员:朱嘉程,张馨康,姚远,符海,崔硕,杨子秦,陈栩辉
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!