基于事件触发和混杂逻辑动态模型的船舶轨迹的跟踪方法
本发明属于船舶航行控制,具体涉及一种基于事件触发和混杂逻辑动态模型的船舶轨迹的跟踪方法。
背景技术:
1、随着船舶智能化不断提升,船舶运动控制研究逐渐成为热点,船舶轨迹跟踪控制作为一种重要的船舶运动控制方式,也受到了广泛关注,随着水上任务的多样化和复杂化的发展,对于船舶轨迹跟踪控制的要求也越来越高。
2、目前针对船舶轨迹跟踪控制研究提出了pid控制、模型预测控制、自适应控制、滑模控制等控制方法,为消除外界干扰的影响,控制器通常需要频繁操纵螺旋桨和舵机以保证对目标轨迹的稳定跟踪,但在实际的航行驾驶中,通常会避免频繁的操纵以减少不必要的能耗以及机械磨损,且在轨迹控制过程中螺旋桨与舵存在耦合作用,同时连续变化会增加轨迹控制的难度并降低控制的实时性。
3、目前针对船舶轨迹跟踪控制领域提出了许多方法且研究开展大多是在开放水域进行,在开放水域中,洋流、海浪和风等干扰及航速与装载的变化都会对船舶航行轨迹产生一定的影响,这就意味着船舶驾驶员需要频繁操纵螺旋桨和舵且它们之间存在较为复杂的关系,因此目前的研究大多以力和力矩为控制输入,而不考虑螺旋桨的控制过程,但是螺旋桨转速控制系统是一个由离散系统和连续系统组合构成的混杂统,这导致忽略了实际航行中螺旋桨速度控制过程的大惯性。因此在现有的设计方法中主要存在以下两点缺点:控制系统内模型关系复杂,给实时计算带来困难,模型的求解也变得困难。在控制系统存在模型不确定和外界海洋环境干扰下,控制器执行机构需要进行频繁动作,这将会减少执行机构的使用寿命。
技术实现思路
1、本发明的目的在于,提供一种基于事件触发和混杂逻辑动态模型的船舶轨迹的跟踪方法,可在保证轨迹控制精度前提下,减小船舶控制不必要资源损耗并提高控制实时性。
2、为解决上述技术问题,本发明的技术方案为:基于事件触发和混杂逻辑动态模型的船舶轨迹的跟踪方法,包括以下步骤:
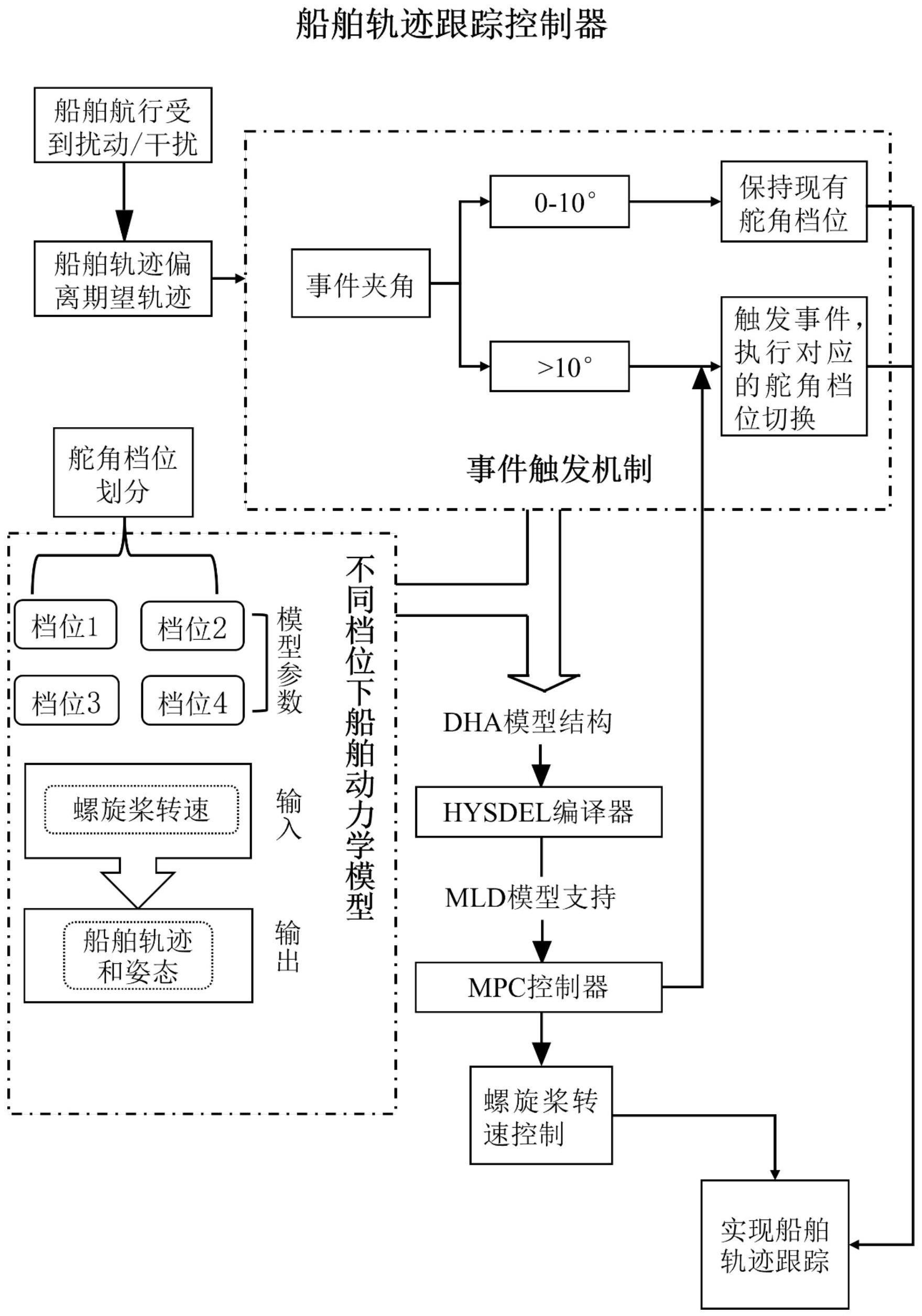
3、s1、对舵角进行档位划分,并结合船舶mmg模型,构建不同舵角档位下的船舶螺旋桨转速与船舶运动的动力学模型;
4、s2、构建事件夹角的定义,并设置夹角阈值作为事件触发机制;事件夹角为船舶速度方向与目标轨迹点方向的夹角;
5、s3、根据船舶mmg模型,船舶螺旋桨转速与船舶运动的动力学模型与事件夹角及其事件触发机制,构建混杂逻辑动态模型;
6、s4、以混杂逻辑动态模型作为预测模型,对船舶轨迹跟踪控制。
7、s1中舵角的档位划分具体为:
8、根据实际航行需要,设置舵角档位g,其中g∈{1,2,3,4},利用逻辑变量进行编码后档位g表示为:
9、g(k)=1+ξ1(k)+2ξ2(k)
10、其中ξ1(k),ξ2(k)为逻辑变量且ξ1(k),ξ2(k)∈{0,1},每个档位对应固定舵角值。
11、s1中船舶螺旋桨转速与船舶运动的动力学模型的构建方法为:以船舶mmg模型为基础,结合划分的舵角档位,以不同档位舵角值作为模型参数,将船舶mmg模型转化为以螺旋桨转速为单输入,以船舶轨迹和姿态为输出,得到船舶螺旋桨转速与船舶运动的动力学模型表示为:
12、
13、其中,u、v、r分别表示船舶的纵向速度、横向速度及艏向角速度,ψ、分别表示船首向与侧倾角,x、y分别表示船舶的横向位置和纵向位置,δ、n分别表示舵角与船舶螺旋桨转速;u、l分别表示船舶合速度与船长;x、y、k、n表示所受各种合外力及力矩:x表示船体在横向方向的运动力,包括紊流阻力、风阻力与摩擦阻力等多个因素;y表示船体在纵向方向的运动力,包括浮力、重力、推进力等多个因素;k表示船体在转向方向的运动力矩,包括侧推器、舵面、螺旋桨等各种舵力因素;n表示船体在侧倾方向的运动力矩,包括侧推器、舵面、螺旋桨、地球引力等因素;detm=m22·m33·m44-m32·m44-m42·m33,m11=(m+mx),m22=(m+my),m32=-my·iy,m42=my·αy,m33=(ix+jx),m44=(iz+jz);
14、m11、m22、m33、m44、m32、m42,这些系数表示刚体在三维空间中的质量和惯性矩:m11表示刚体自身质量和x轴上附加质量的总和;m22表示刚体自身质量和y轴上附加质量的总和;m33表示刚体绕x轴的惯性矩,表示刚体绕该轴旋转运动阻力的量度;m44表示刚体绕z轴的惯性矩,它是刚体绕该轴旋转运动的阻力的量度,包括自身绕该轴的惯性矩以及在z轴上的额外惯性矩;m32为在y轴上的附加质量与该质量沿y轴距质心距离的乘积;m42表示在y轴上的附加质量与该质量沿z轴到质心的距离的乘积。
15、s2中事件触发机制具体为:设置夹角阈值为10°,当时间t∈[tk,tk+1)时,事件触发机制算法表示为:
16、τ(tk)=(cb)-1{-cf(γ(tk),ηq(tk))}
17、其中,c为触发条件的权重矩阵,γ(tk)为触发时刻的角度误差值,tk为事件触发时刻,为期望轨迹,当|γ(tk)|>10时,达到触发条件。
18、s3中混杂逻辑动态模型具体为:
19、x(m+1)=ax(m)+b1u(m)+b2δ(m)+b3z(m)
20、y(m)=cx(m)+d1u(m)+d2δ(m)+d3z(m)
21、e2δ(m)+e3z(m)≤e4x(m)+e1u(m)+e5
22、其中,a、b、c、d均为矩阵参数,a为状态转移矩阵,描述系统状态随时间演化情况,b1、b2、b3均为输入转移矩阵,c为输出转移矩阵,描述状态映射到输出的状况,d1、d2、d3分别表示控制输入、扰动输入及测量输入对输出的影响矩阵;舵角档位作为离散输入,螺旋桨转速为连续输入,式中表示系统状态即船舶运动状态,y包含连续输出和离散输出,为输出的矢量值;为控制的输入,包括连续指令uc(m)和二元指令ub(m);δ为辅助二进制变量,z为连续辅助变量,x(m)=[ζ(m),vc(m),n(m),fr(m),sr(m)]m,m为时刻,ζ为船舶实际位置与期望轨迹对应点的距离偏差,vc为船速,n为螺旋桨转速,fr为舵角指令;sr为操舵事件触发模式,当夹角小于事件夹角时sr为0即不触发事件,船舶正常航行,夹角大于设定阈值时则为触发事件,此时sr为1。
23、s4中将混杂逻辑动态模型作为预测模型导入mpc控制器并对mpc控制器进行设计,对船舶轨迹跟踪控制。
24、s4中mpc控制器的设计方式为:
25、
26、其中,n为控制器中预测步长,nc为控制步长,且有n≥nc。
27、s4中对船舶轨迹跟踪控制的方法为求解二次型优化性能指标,其表示为:
28、
29、其中,u为控制量包括舵角指令fr和转速指令n,q为输出权重矩阵,r为输入权重矩阵;
30、通过对二次型优化性能指标的求解,求得每一时刻船舶控制指令的最优解序列,将最优控制序列的第一个元素作为当前时刻的控制输入。
31、还提供一种计算机设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任一项所述方法的步骤。
32、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一项所述方法的步骤。
33、与现有技术相比,本发明的有益效果为:
34、本发明可在保证轨迹控制精度前提下,减小船舶控制不必要资源损耗并提高控制实时性;降低了舵角执行器的控制频率并提高了控制计算的实时性;简化了控制系统内部的模型关系,给实时计算带来便利,使模型的求解也变得简便;控制器执行机构不需要进行频繁动作,延长了执行机构的使用寿命。
- 还没有人留言评论。精彩留言会获得点赞!