一种基于PID控制微带阵列天线表面温度的系统和方法
本发明涉及天文探测,尤其是与亚毫米波天文望远镜相关的研究领域,具体为一种基于pid控制微带阵列天线表面温度的系统和方法。
背景技术:
1、近几十年来,国际上有关大口径高精度亚毫米波望远镜的研究相对较少,其中主要原因是大口径高精度天线技术没有取得较好的进展。针对这种情况,中国科学院紫金山天文台王海仁等人提出一种基于超高稳定多路光纤传输技术相位自适应稳定系统,简称pass(发明专利申请公布号cn 114784509a),为毫米波/亚毫米波射电望远镜面型高精度测量提供一种有效方法。但在pass走向实用的过程中,我们发现工作环境温度变化,影响了信号通过pass中使用的发射天线和接收天线的相位,从而产生了相位测量误差。所以,对pass中发射天线和接收天线的工作环境温度进行控制,有着重要的意义。
技术实现思路
1、针对现有技术的不足,本发明提供了一种基于pid控制微带阵列天线表面温度的系统和方法,以解决温差对天线发射端和接收端带来的相位测量误差问题。
2、为实现上述目的,本发明采用了以下技术方案:
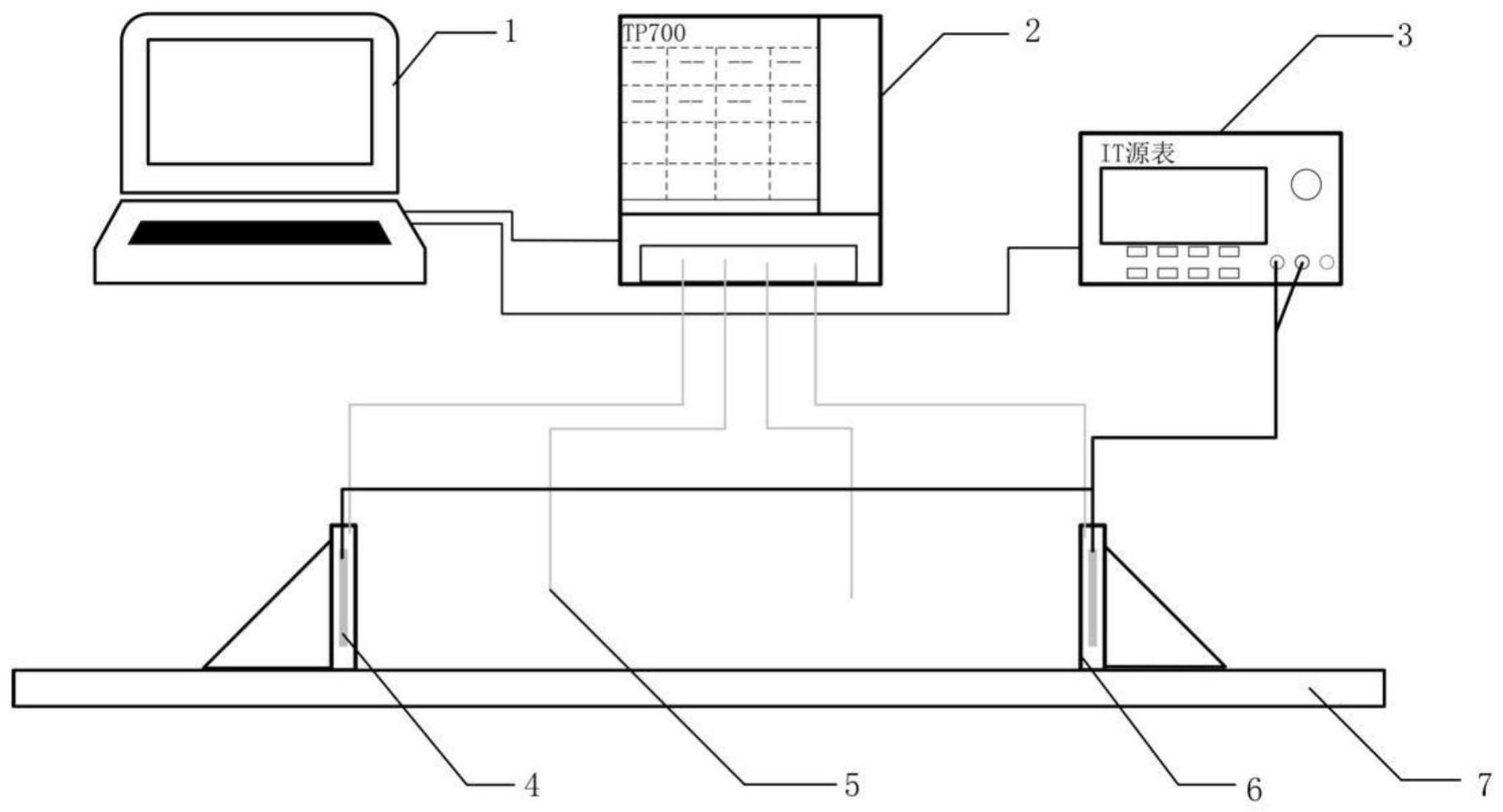
3、一种基于pid控制微带阵列天线表面温度的系统,包括测量模块、控制模块和pid控制器,其特征在于:
4、所述测量模块包括两个微带阵列天线、多路数据记录仪和温度传感器,两个微带阵列天线分别为发射端微带阵列天线和接收端微带阵列天线,发射端微带阵列天线和接收端微带阵列天线上各安装有一温度传感器,两温度传感器的信号输出端分别与多路数据记录仪连接,所述多路数据记录仪的信号输出端则与pid控制器连接,用于向pid控制器反馈发射端微带阵列天线和接收端微带阵列天线的温度数据;
5、所述控制模块包括两块薄膜型电加热器及其供电设备,两薄膜型电加热器分别贴附在发射端微带阵列天线和接收端微带阵列天线的基板的背面,两薄膜型电加热器的电源输入端与对应的供电设备电源输出端连接,供电设备的控制信号输入端则与pid控制器的控制信号输出端连接;
6、所述pid控制器对两个薄膜型电加热器实施恒温控制或线性温控,工作时根据预设的恒温控制的目标温度或者线性温控的目标温度范围以及温度传感器实时反馈的温度数据,向控制对象供电设备发送控制指令,通过调节供电设备向两个薄膜型电加热器施加的电压信号,使温度传感器反馈的发射端微带阵列天线和接收端微带阵列天线的温度数据达到目标温度或在目标温度范围内线性变化。
7、在上述方案的基础上,进一步改进或优选的方案还包括:
8、进一步的,所述温度传感器为热电阻温度传感器,贴附薄膜型电加热器的背面;所述供电设备为可编程直流电源。
9、进一步的,所述薄膜型电加热器的薄膜材料为聚酰亚胺,发热材料为铜镍锰合金。
10、进一步的,所述薄膜型电加热器与相应微带阵列天线贴合的部位与该微带阵列天线基板的背面形状一致,以使加热区域均匀覆盖该微带阵列天线的背面。
11、进一步的,所述发射端微带阵列天线和接收端微带阵列天线均为8*8的微带阵列天线,厚度为0.13英寸,其基板为铝制基板,所述铝制基板的背面尺寸为2.95*2.95英寸。
12、进一步的,所述pid控制器为运行pid控制程序的计算机。
13、进一步的,如上所述的一种基于pid控制微带阵列天线表面温度的系统的运行方法,其特征在于,pid控制器进行恒温控制时,对任一薄膜型电加热器的pid控制表达式为:
14、
15、式中,k为pid控制的第k次调节,v(k)为pid控制器在第k次调节中向供电设备输出的调节电压的控制量,e(k)为第k次调节时的温度误差,e(k)=ttarget-t(k),ttarget为恒温控制的目标温度,t(k)为第k次调节时相应温度传感器反馈的温度数据,kp、ki和kd为pid控制参数,分别为比例、积分和微分系数。
16、进一步的,pid控制器进行线性温控时,对任一薄膜型电加热器的控制过程包括:
17、根据预设的目标温度范围ttarrange、温度每秒变化步长δtstep和调节周期时长period,得到每个调节周期完成后对应的温度节点ttararray(j),汇集各温度节点,获得由多个温度节点组成的调节温度点集ttararray,其表达式为:
18、
19、式中,ttarbase为目标温度范围ttarrange的基础温度,ttartop为目标温度范围ttarrange的最高温度,j为调节周期的序号;
20、将每个调节周期作为一次恒温控制,在每个调节周期内,将对应的ttararray(j)作为当前周期的目标温度ttarget带入表达式(1),计算出每个调节周期对应的v(k),从而实施pid控制。
21、进一步的,所述的运行方法包括以下步骤:
22、步骤s1、组装系统,完成测量模块、控制模块和运行pid控制器的连接,依据预设的初始化参数对系统进行初始化操作;
23、步骤s2、待系统初始化完成,读取两微带阵列天线的当前温度te1和te2,根据预设参数运行pid控制器(1),提升微带阵列天线到目标温度或目标温度范围的基础温度,所述基础温度应高于te1和te2;
24、步骤s3、针对当前测试环境,对pid控制参数进行调参,使两温度传感器反馈的天线温度数据与预设的目标温度或基础温度的差值稳定在±0.05℃以内。
25、本发明的有益效果是:
26、本发明提出一种基于pid控制微带阵列天线表面温度的系统和方法,根据温度传感器采集的发射端和接收端的天线表面温度变化,计算pid控制器对供电设备输出电压的控制量,主动调节紧贴在天线后的电加热器的温度升降,达到合适微带阵列天线表面温度的目的。同时,通过控制方法改进之后,本发明系统有以下两方面特点:1)天线表面温度精度高,而且温度调节速度较快;2)可以避免或降低环境温度对天线传输信号的相位的影响,实现长时间天线相位稳定。
技术特征:
1.一种基于pid控制微带阵列天线表面温度的系统,包括测量模块、控制模块和pid控制器(1),其特征在于:
2.根据权利要求1所述的一种基于pid控制微带阵列天线表面温度的系统,其特征在于,所述温度传感器(5)为热电阻温度传感器,贴附薄膜型电加热器(4)的背面。
3.根据权利要求1所述的一种基于pid控制微带阵列天线表面温度的系统,其特征在于,所述薄膜型电加热器(4)的薄膜材料为聚酰亚胺,发热材料为铜镍锰合金,所述供电设备(3)为可编程直流电源。
4.根据权利要求3所述的一种基于pid控制微带阵列天线表面温度的系统,其特征在于,所述薄膜型电加热器(4)与相应微带阵列天线(6)贴合的部位与该微带阵列天线(6)基板的背面形状一致,以使加热区域均匀覆盖该微带阵列天线(6)的背面。
5.根据权利要求4所述的一种基于pid控制微带阵列天线表面温度的系统,其特征在于,所述发射端微带阵列天线和接收端微带阵列天线均为8*8的微带阵列天线,厚度为0.13英寸,其基板为铝制基板,所述铝制基板的背面尺寸为2.95*2.95英寸。
6.根据权利要求1所述的一种基于pid控制微带阵列天线表面温度的系统,其特征在于,所述pid控制器(1)为运行pid控制程序的计算机。
7.如权利要求1所述的一种基于pid控制微带阵列天线表面温度的系统的运行方法,其特征在于,pid控制器(1)进行恒温控制时,对任一薄膜型电加热器(4)的pid控制表达式为:
8.根据权利要求7所述的运行方法,其特征在于,pid控制器(1)进行线性温控时,对任一薄膜型电加热器(4)的控制过程包括:
9.根据权利要求7或8所述的运行方法,其特征在于,包括以下步骤:
技术总结
本发明公开一种基于PID控制微带阵列天线表面温度的系统和方法,所述系统包括测量模块、控制模块和PID控制器,所述测量模块包括两个微带阵列天线、多路数据记录仪和温度传感器,所述控制模块包括两块薄膜型电加热器及其供电设备。本发明根据温度传感器采集的发射端和接收端的天线表面温度变化,计算PID控制器对供电设备输出电压的控制量,主动调节紧贴在天线后的电加热器的温度升降,达到合适微带阵列天线表面温度的目的。同时,通过控制方法改进之后,本发明系统有以下两方面特点:1)天线表面温度精度高,而且温度调节速度较快;2)可以避免或减小环境温度对天线传输信号的相位的影响,实现长时间天线相位稳定。
技术研发人员:程文胜,梁静思,王博铖,王海仁,左营喜
受保护的技术使用者:中国科学院紫金山天文台
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!