一种基于三维点云数据的机器人打磨路径自动规划方法与流程
本发明涉及核退役智能装备领域,尤其是针对核退役设备中去污装置的自动化打磨,具体是一种基于三维点云数据的机器人打磨路径自动规划方法。
背景技术:
1、随着核设备的大量发展随之而来的就是核设备退役问题,一般来说相关核设备在退役阶段都需要进行去污处理,主要为设备表面打磨。但是由于设备复杂,在打磨操作过程中,均采用人工进行打磨。并且鉴于辐射原因,工作人员需要全程佩戴厚重防护服进行高强度打磨作业。
2、为满足核退役设备尺寸一致性差、结构件形状复杂、工件表面粗糙的打磨需求,提高打磨规划的自动化程度和适应性,提高打磨的效率和减少人力成本,减少打磨恶劣环境对工人们带来的健康问题。随着自动化产业的发展,逐步采用了机器人替代人工方式,通过智能机器人实现打磨处理。
3、在核退役设备中,待打磨的设备工件存在尺寸大、表面结构复杂多为自由曲面、打磨轨迹规划比较复杂的情况,同时无数模或者实际设备结构件与理论模型之间的大余量很可能造成离线编程规划出的打磨位置跟实际需要加工的位置相差较大,出现机器人过打磨或欠打磨的情况,故无法采用离线编程的方式生成打磨机器人轨迹程序,所以传统的基于cad 等设计模型的离线编程已经不能满足现在的加工需求。
4、为提高自动化程度以及减少人工作业量保护人员身体健康,提出了针对核退役设备处理具有重大意义的基于三维点云数据的机器人打磨路径自动规划方法。
技术实现思路
1、本发明目的在于解决核退役设备的自动化去污处理问题,提供了一种基于三维点云数据的机器人打磨路径自动规划方法,主要应用于核设备退役时带有辐照污染的解决方案,具有自动化打磨,减少工人劳动强度;相较于传统的人工打磨方法,具有通用性高、自动化程度高等特点。
2、本发明的技术内容如下:
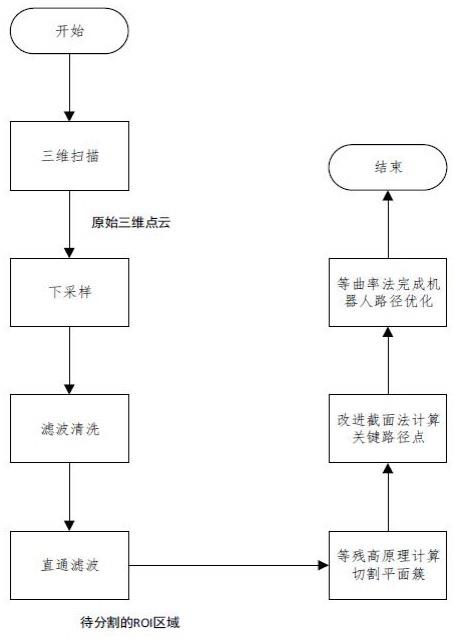
3、一种基于三维点云数据的机器人打磨路径自动规划方法,其步骤如下:
4、(1)通过三维扫描获取原始三维点云数据;所述原始三维点云数据维度为n*3的二维矩阵,其中n代表点云中的点个数,3代表x和y、z(即点在空间中的坐标)。
5、(2)对获取的原始数据进行下采样和滤波清洗,去除噪声和简化点云;
6、具体采样过程为:在点云空间中建立三维网格,首先除去不包含点云数据的三维网格,然后对包含有点云数据的三维网格,用每个三维网格的质心来代替每个三维网格中所有的点云数据。对经过下采样的点云数据再进行滤波处理,通过离群点统计滤波去除点云数据中的离群点。
7、(3)对清洗转换后的三维点云数据进行直通滤波,主要用于空间分布范围已知的点云数据的处理,包括大量离群点去除或者无关区域的点云全部去除;
8、(4)将直通滤波后的三维点云数据作为待分割的roi区域(即感兴趣区域),通过区域生长提取出边界点云;
9、(5)对待分割的roi区域利用等残高原理计算切割平面簇;
10、(6)基于改进截面法计算打磨关键路径点以及对应的机器人姿态;
11、(7)利用等残高行距改进和等曲率插补法完成机器人打磨路径优化;
12、通过上述步骤(1)-(7)从而完成了基于三维点云的机器人打磨路径自动规划。
13、进一步地,步骤(4)中对直通滤波后的三维点云数据进行分割时,具体的区域生长步骤如下:
14、41)首先,获得三维点云数据中所有点的法线和曲率值,并按曲率从小到大对点进行排序,直到所有的点都被标记上;
15、42)设置一空的种子点集合和一个空的聚类数组;
16、43)选取曲率最小的点放入上述种子点集合中;
17、44)从种子点集合按顺序取一个点a来搜寻其邻域,对邻域中寻找到的每一个邻近点,获得每一个邻近点的法线与当前种子点a的法线的夹角,将夹角小于设定阈值的邻近点均添加到聚类数组b中;
18、45)将聚类数组b的每个点的曲率值与设定的曲率阈值判断,当邻近点的曲率值小于设定阈值时,将该邻近点添加到种子点集合中;
19、46)将当前种子点移出种子点集合;
20、47)结束后删除用过的种子点,用下一个种子点重复第44)~45)步,直至种子点集合清空为止;
21、48)从曲率排序的点中,即从小到大的排序,取聚类数组b中没有的点作为种子点,重复第42)~47)步骤;如此以往即计算出对应的截面。
22、进一步地,步骤(6)中采用改进截面法的处理是:
23、61)获得机器人打磨时的路径点和每个路径点对应的打磨姿态,截面之间的间距设置是根据两条加工路径之间的最大等残高原理来设置;其中,根据实际待打磨工件情况确定至少两条加工路径。
24、62)获得的路径点均为离散点,故对所有离散点进行曲线拟合,获得一条机器人打磨路径。这里,可以用多项式对离散点进行拟合计算。
25、进一步地,步骤(7)采用的等曲率插补法进行优化的具体过程为:对于相邻的两个路径点 p(ui)、p(ui+1),li为直线插补,即相邻两个路径点之间的连线,p为对应路径曲线的曲率半径,δ 为弓高误差;通过判断原则判断弓高误差大小,确保在曲率变化较大的地方,弓高误差要小于设定值;所述判断原则为:插补步长越短,则弓高误差越小,插补步长越长,则弓高误差越大。
26、通过上述方法进行去污自动化打磨,可有效改善核退役设备的处理智能自动化程度,适合核设备领域的广泛应用。
27、本发明的有益效果如下:
28、本发明适用于退役核设备的去污处理自动化打磨工序,能满足核退役设备尺寸一致性差、结构件形状复杂、工件表面粗糙的打磨需求,可提高打磨规划的自动化程度和适应性,可有效提高打磨的效率和减少人力成本,减少打磨恶劣环境对工人们带来的健康问题;同时,相较于传统的人工打磨方法,具有通用性高、自动化程度高等特点。
技术特征:
1.一种基于三维点云数据的机器人打磨路径自动规划方法,其特征在于步骤如下:
2.如权利要求1所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤(2)中进行下采样的过程为:在点云空间中建立三维网格,首先除去不包含点云数据的三维网格,然后对包含有点云数据的三维网格,用每个三维网格的质心来代替每个三维网格中所有的点云数据,形成的下采样后的点云数据表示为c0,表示为:
3.如权利要求1或2所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤(2)中对经过下采样的点云数据进行滤波处理,通过离群点统计滤波去除点云数据中的离群点。
4.如权利要求3所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,通过离群点统计滤波时,首先获得点云数据中每个点的邻近点,对邻近点取平均距离作为统计值,计算出均值和标准差,并设置标准差阈值;对超过标准差阈值的点,被判断为离群点,移除掉。
5.如权利要求1所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤(4)中对直通滤波后的三维点云数据进行分割时,具体的区域生长步骤如下:
6.如权利要求1所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤(6)中采用改进截面法的处理是:
7.如权利要求6所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤62)中是采用多项式对离散点进行拟合计算如下:
8.如权利要求1所述的基于三维点云数据的机器人打磨路径自动规划方法,其特征在于,步骤(7)采用的等曲率插补法进行优化的具体过程为:对于相邻的两个路径点 p(ui)、p(ui+1),li为直线插补,即相邻两个路径点之间的连线,p为对应路径曲线的曲率半径,δ 为弓高误差;通过判断原则判断弓高误差大小,确保在曲率变化较大的地方,弓高误差要小于设定值;所述判断原则为:插补步长越短,则弓高误差越小,插补步长越长,则弓高误差越大。
技术总结
本发明公开了一种基于三维点云数据的机器人打磨路径自动规划方法,首先扫描获取待打磨工件的原始三维点云数据;通过点云滤波、点云配准获取准确的待打磨区域点云,最后通过区域生长和边界信息进行点云分割为打磨路径规划提供准确基础点云数据;针对基础点云数据,利用截面法计算打磨工艺加工路径;最后基于等残高原理和等曲率的路径插补法完成机器人打磨路径规划优化。本发明解决了工件模型未知及来料模型一致性差等问题,由于获得的三维扫描点云表面质量差无法利用现有软件处理点云模型,因此从三维点云数据出发进行路径规划,减少了三维点云重构的复杂计算,减少了三维点云数据的重构计算量,明显提高了实际打磨效果,简单实用,通用性强。
技术研发人员:陈弈,凌乐,周东,黄安立,梁恩培
受保护的技术使用者:东方电气集团科学技术研究院有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!