一种未知动态环境下非线性系统的多模式神经控制方法
本发明涉及非线性控制系统,具体为一种未知动态环境下非线性系统的多模式神经控制方法。
背景技术:
1、机器人机械臂的控制涉及到非线性控制系统,非线性控制系统中模式识别,结合自适应,学习和自组织系统在20世纪60年代得到广泛的研究。通过把控制模式定义为由一组状态变量表示的控制情形,控制模式中的信息,即控制情形,在闭环控制过程中得到学习,然后被用作控制经验。随后,提出了对不同控制情形进行分类的模式识别方法。根据分类结果,对应于特定控制情形的经验控制器被选择用于控制当前系统。如前所述,该过程与人类轻松完成熟练的控制动作类似。
2、上述问题提供了一个新的研究方向,但在技术领域实现时存在如下挑战:动态环境下的学习可能是自适应和学习控制领域最困难的问题。基于神经网络的非线性动态逼近能力,自适应神经控制已取得了大量的研究成果。
3、然而,关于自适应神经控制的现有研究成果主要关注于控制系统的稳定性以及跟踪性能,神经网络(neural network,nn)逼近的效果可能与系统真实的非线性特性存在差距,因此,自适应控制的学习能力实际上非常有限,因为持续激励(persistent exciting,pe)条件通常得不到满足,并且不能实现参数估值收敛到其真实或最佳值。
技术实现思路
1、本发明针对现有技术中存在的问题,基于确定性学习理论,将研究未知动态环境下严格反馈非线性系统的多模式神经控制中的几个关键技术,用于解决多模式切换下具有不确定性的非线性时滞系统的快速决策与控制性能问题。多模式切换下的神经网络控制方法将非线性系统辨识中的持续激励条件满足、智能控制中的自主学习、动态模式的快速识别、基于动态模式的控制等不同领域的研究有机地联系起来构建统一框架。该方法涉及到高性能控制器集的构建,控制情形(动态模式)在线识别,基于模式的控制器选取,以及时滞系统的稳定性等方面。所执行的基于模式的控制过程与人类对重复性任务的高效执行过程类似。
2、本发明提供的一种未知动态环境下非线性系统的多模式神经控制方法,包括以下步骤:
3、基于确定性学习理论和动态面控制方法,选择对于机器人机械臂非线性系统的自适应神经网络控制方案,针对机器人机械臂非线性系统的各个严反馈子系统的闭环动态进行建模;
4、针对各个严反馈子系统组成的闭环模型集合,构建基于相应控制情形的常值高性能神经控制器集;
5、将常值高性能神经控制器集中的任一常值静态控制器u作为输入的系统动态进行神经网络建模,并将嵌入了作为中间变量的系统的辨识结果以时不变且空间分布的方式表达,以常值径向基函数网络神经网络权值的方式存贮起来,构建动态监测系统;
6、基于动态监测系统,根据定义的不匹配函数对残差范数影响的关系式构建动态模式识别器;
7、基于动态模式识别器,识别出控制模式,根据控制模式选择高性能神经控制器集中的高性能神经控制器,执行对当前机器人机械臂非线性系统的控制。
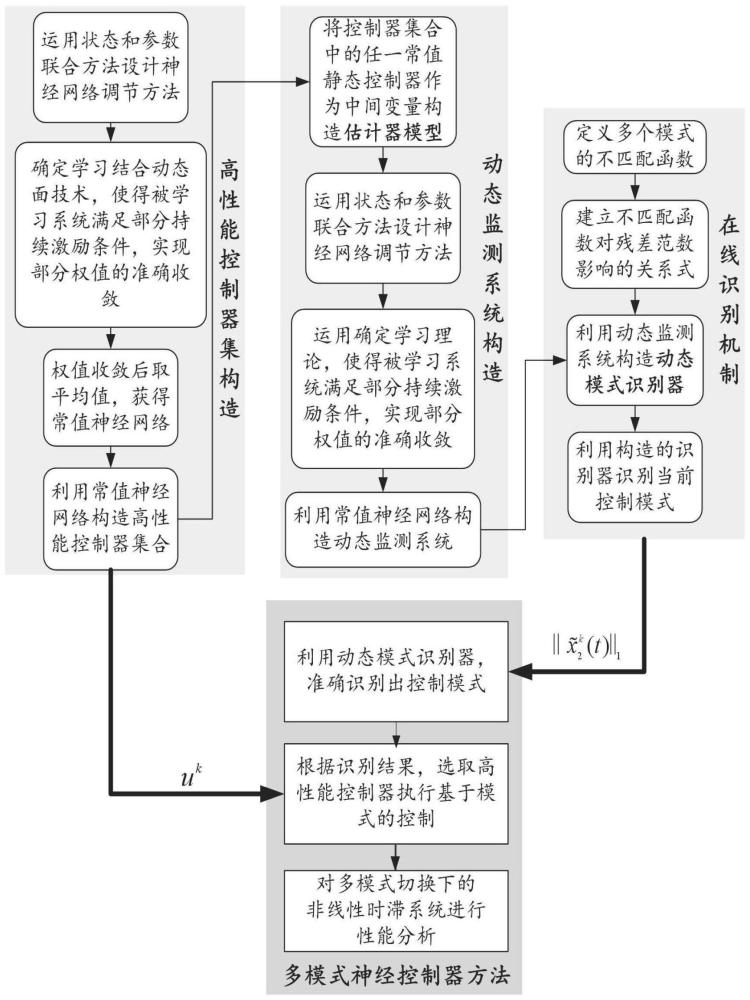
8、进一步的,所述常值高性能神经控制器集的构建,具体包括以下步骤:
9、运用状态和参数联合方法设计神经网络调节方法;
10、运用确定性学习理论和动态面控制方法,使得被学习系统满足部分持续激励条件,实现部分权值的准确收敛;
11、权值收敛后取平均值,获得常值神经网络;
12、利用常值神经网络构建常值高性能神经控制器集。
13、进一步的,所述动态监测系统的构建,具体包括以下步骤:
14、将常值高性能神经控制器集中的任一常值静态控制器作为中间变量构建估计器模型;
15、运用状态和参数联合方法设计神经网络调节方法;
16、运用确定性学习理论和动态面控制方法,使得被学习系统满足部分持续激励条件,实现部分权值的准确收敛;
17、基于估计器模型,利用常值神经网络构建动态监测系统。
18、进一步的,所述动态模式识别器的构建,具体包括以下步骤:
19、定义多个模式的不匹配函数;
20、建立不匹配函数对残差范数影响的关系式;
21、基于动态监测系统,根据定义的不匹配函数对残差范数影响的关系式构建动态模式识别器。
22、进一步的,将所述动态面控制方法与所述确定性学习理论结合,通过引入一阶低通滤波器,将滤波器的输出量作为神经网络的输入量,解决对非线性系统进行建模时的计算负担问题。
23、进一步的,所述不匹配函数的定义,具体包括:
24、不同的控制情形之间的不匹配函数定义为,沿着子系统的轨迹两种不同的控制情形之间的差异;
25、被监测子系统与控制情形估计器之间的不匹配函数定义为,沿着被监测子系统的轨迹,被监测子系统的控制情形与失配的控制情形的常数神经网络之间的差异。
26、进一步的,本发明提供的一种未知动态环境下非线性系统的多模式神经控制方法,还包括:
27、利用动态监测系统和动态模式识别器对控制情形进行识别时,针对由于控制器切换和时滞带来的异步切换问题,通过引入预测项和lyapunov-krasovskii泛函,将原全状态时滞系统转化为无时滞系统,建立了与时滞无关的控制器,降低学习参数的复杂性,降低对多个模式切换下的非线性系统控制性能影响。
28、与现有技术相比,本发明提供的一种未知动态环境下非线性系统的多模式神经控制方法,其有益效果是:
29、本发明通过采用多模式控制方法,探索动态模式识别机制,分析识别速度与系统性能之间关系的内在规律,模拟人对控制动作的快速学习和重复能力,从而实现类人的高性能低功耗控制。针对系统参数突变等有限个控制模式,基于确定学习机制,分别设计自适应控制器实现闭环稳定性和跟踪性能,并将所辨识的控制系统动态存储于常值的径向基函数网络,构建高性能控制器集合;构建动态监测系统和动态模式识别器,模拟人对控制动作的准确快速识别;根据识别结果,选取基于模式的高性能控制器,实现类人的高性能低功耗控制。
技术特征:
1.一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,包括以下步骤:
2.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,所述常值高性能神经控制器集的构建,具体包括以下步骤:
3.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,所述动态监测系统的构建,具体包括以下步骤:
4.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,所述动态模式识别器的构建,具体包括以下步骤:
5.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,将所述动态面控制方法与所述确定性学习理论结合,通过引入一阶低通滤波器,将滤波器的输出量作为神经网络的输入量,解决对非线性系统进行建模时的计算负担问题。
6.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,所述不匹配函数,其定义具体包括:
7.如权利要求1所述的一种未知动态环境下非线性系统的多模式神经控制方法,其特征在于,还包括:
技术总结
本发明公开了一种未知动态环境下非线性系统的多模式神经控制方法,涉及非线性控制系统技术领域,本发明通过采用多模式控制方法,探索动态模式识别机制,分析识别速度与系统性能之间关系的内在规律,模拟人对控制动作的快速学习和重复能力,从而实现类人的高性能低功耗控制。针对系统参数突变等有限个控制模式,基于确定学习机制,分别设计自适应控制器实现闭环稳定性和跟踪性能,并将所辨识的控制系统动态存储于常值的径向基函数网络,构建高性能控制器集合;构建动态监测系统和动态模式识别器,模拟人对控制动作的准确快速识别;根据识别结果,选取基于模式的高性能控制器,实现类人的高性能低功耗控制。
技术研发人员:杨飞飞,王聪,陶玉昆,张勋才,和萍,姜素霞,刘鹏,栗三一,兰奇逊,凌丹
受保护的技术使用者:郑州轻工业大学
技术研发日:
技术公布日:2024/4/7
- 还没有人留言评论。精彩留言会获得点赞!