自动驾驶车辆的故障处理方法、装置、存储介质和电子设备与流程
本技术涉及自动驾驶,具体而言,涉及一种自动驾驶车辆的故障处理方法、装置、存储介质和电子设备。
背景技术:
1、随着人工智能、汽车电子及互联网技术的发展,自动驾驶汽车受到越来越多的关注,各大车企相继展开了自动驾驶的研究工作。但由于自动驾驶技术所涉及到的系统模块较多,因此,如何达到自动驾驶所需的功能安全等级,关键的一项就是故障处理。
2、目前,相关技术对自动驾驶功能多系统之间的故障处理通常是采用一刀切、过度处理等方式,但该处理措施可能会出现系统之间的处理措施冲突,导致自动驾驶车辆在行驶过程中因故障处理措施不当,发生车辆失控、碰撞等安全问题,进而影响自动驾驶车辆运行的安全性。
3、针对上述的问题,目前尚未提出有效的解决方案。
技术实现思路
1、本技术实施例提供了一种自动驾驶车辆的故障处理方法、装置、存储介质和电子设备,以至少解决由于相关技术未对自动驾驶系统交互故障进行分析,导致自动驾驶车辆运行安全性较差的技术问题。
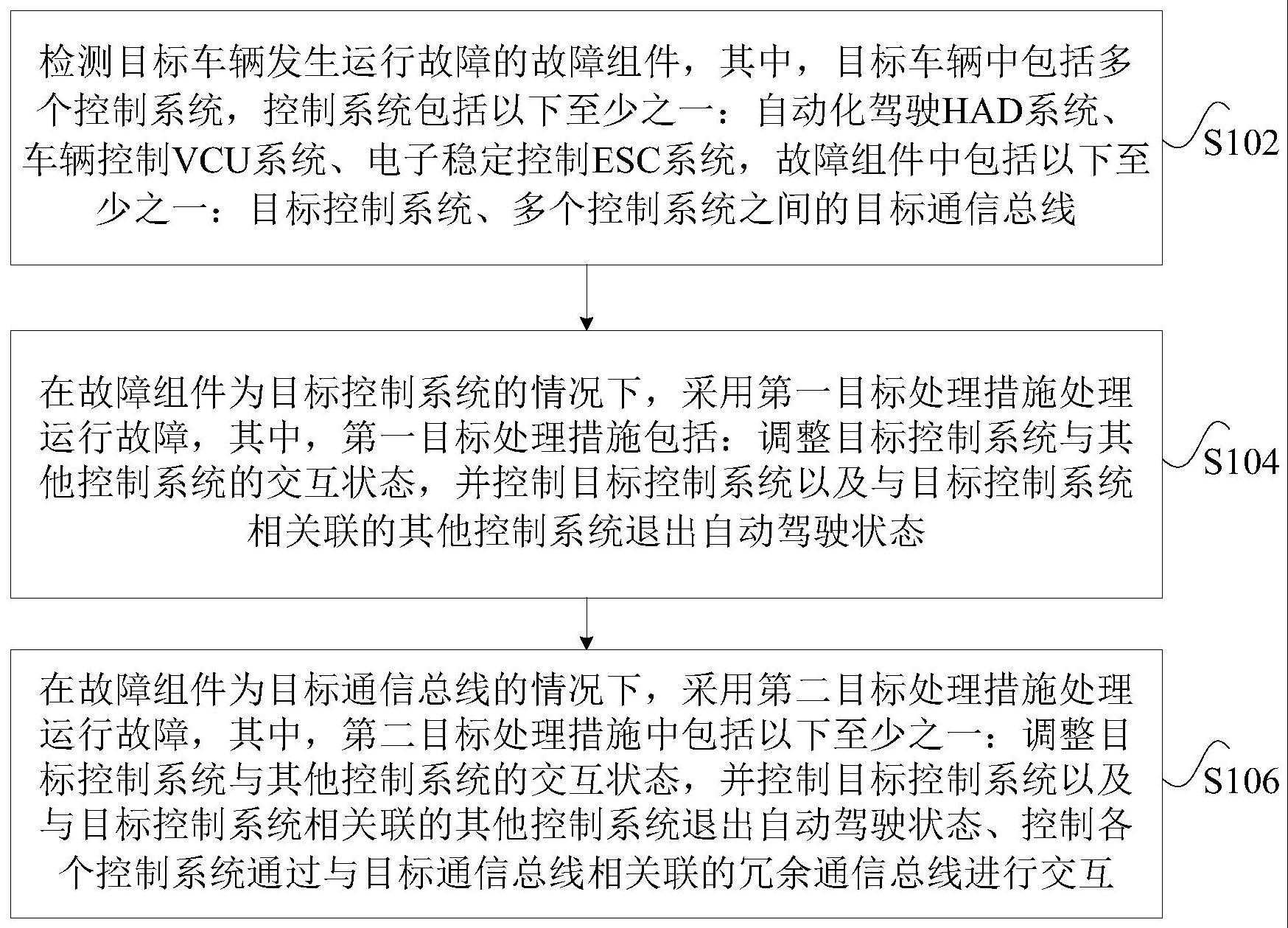
2、根据本技术实施例的一个方面,提供了一种自动驾驶车辆的故障处理方法,包括:检测目标车辆发生运行故障的故障组件,其中,目标车辆中包括多个控制系统,控制系统中包括以下至少之一:自动化驾驶had系统、车辆控制vcu系统、电子稳定控制esc系统,故障组件中包括以下至少之一:目标控制系统、多个控制系统之间的目标通信总线;在故障组件为目标控制系统的情况下,采用第一目标处理措施处理运行故障,其中,第一目标处理措施包括:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态;在故障组件为目标通信总线的情况下,采用第二目标处理措施处理运行故障,其中,第二目标处理措施中包括以下至少之一:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态、控制各个控制系统通过与目标通信总线相关联的冗余通信总线进行交互。
3、可选地,在故障组件为目标控制系统的情况下,采用第一目标处理措施处理运行故障,包括:依据目标控制系统确定故障组件的第一故障类型,其中,故障类型包括以下至少之一:高级驾驶辅助故障、整车控制故障、电子稳定控制故障;依据故障组件的第一故障类型确定采用与故障类型对应的第一目标处理措施处理运行故障。
4、可选地,依据目标控制系统的类型确定故障组件的第一故障类型,包括:在目标控制系统为had系统时,确定故障组件的第一故障类型为高级驾驶辅助故障,其中,had系统中包括以下至少之一:had控制单元、与had控制单元对应的第一传感器;在目标控制系统为vcu系统时,确定故障组件的第一故障类型为整车控制故障,其中,vcu系统中包括以下至少之一:vcu控制单元、与vcu控制单元对应的第二传感器;在目标控制系统为esc系统时,确定故障组件的第一故障类型为电子稳定控制故障,其中,esc系统中包括以下至少之一:esc控制单元、与esc控制单元对应的第三传感器。
5、可选地,第一目标处理措施中包括:第一处理措施、第二处理措施、第三处理措施,其中,依据故障组件的第一故障类型确定采用与故障类型对应的第一目标处理措施处理运行故障,包括:在第一故障类型为高级驾驶辅助故障的情况下,确定采用与高级驾驶辅助故障对应的第一处理措施处理运行故障,并控制had系统退出自动驾驶状态,其中,第一处理措施用于控制had系统分别向vcu系统和esc系统发送第一信号,其中,第一信号表示had系统的自动驾驶功能不可用;将vcu系统的运行状态切回至初始状态,并由esc系统在稳定控制状态下发送的扭矩信号控制vcu系统的运行状态,其中,初始状态中包括:目标对象驾驶目标车辆的需求扭矩、目标车辆在自动驾驶状态下的目标时刻的行驶档位;在第一故障类型为整车控制故障的情况下,确定采用与整车控制故障对应的第二处理措施处理运行故障,并控制vcu系统和esc系统退出自动驾驶状态,其中,第二处理措施包括:控制vcu系统分别向had系统和esc系统发送第二信号,第二信号表示vcu系统的第一接口不可用;通过had系统判断目标车辆的工况状态;在工况状态为制动工况时,控制esc系统响应目标对象的减速请求,直至目标车辆的行驶速度减至零时,分别向vcu系统和esc系统发送第一信号,同时控制vcu系统将档位切回至空挡且esc系统开启驻车制动;在工况状态为加速工况时,若目标车辆的驾驶动作不是危险驾驶动作,确定分别向vcu系统和esc系统发送第一信号,其中,危险驾驶动作包括以下至少之一:超车、变道;在第一故障类型为电子稳定控制故障的情况下,确定采用与电子稳定控制故障对应的第三处理措施处理运行故障,并控制vcu系统和esc系统退出自动驾驶状态,其中,第三处理措施用于控制esc系统向had系统发送第三信号,其中,第三信号表示esc系统的第二接口不可用;通过had系统判断目标车辆的工况状态,其中,在工况状态为制动工况时,控制vcu系统响应had系统的减速请求,并对esc系统执行制动降级处理,直至目标车辆的行驶速度减至零时,分别向vcu系统和esc系统发送第一信号,同时控制vcu系统将档位切回至空挡且esc系统开启驻车制动,其中,制动降级处理用于增大目标车辆的液压制动力;在工况状态为加速工况时,控制目标车辆行驶至目标停车点时,使目标车辆的工况状态切换为制动工况。
6、可选地,第二目标处理措施中包括:第四处理措施、第五处理措施,其中,在故障组件为目标通信总线的情况下,确定采用第二目标处理措施处理运行故障,包括:依据目标通信总线的数量确定目标通信总线的第二故障类型,其中,第二故障类型包括以下至少之一:单点失效、两点失效;在目标通信总线的第二故障类型为单点失效的情况下,确定采用第四处理措施处理运行故障,其中,第四处理措施中包括以下至少之一:had系统连接第一通信网关的任一第一通信总线失效时,确定采用与第一通信总线相关联的冗余通信总线进行交互;vcu系统连接第二通信网关的任一第二通信总线失效时,确定采用与第二通信总线相关联的冗余通信总线进行交互;esc系统连接第三通信网关的任一第三通信总线失效时,确定采用与第三通信总线相关联的冗余通信总线进行交互;在目标通信总线的第二故障类型为两点失效的情况下,确定目标通信总线连接的目标控制系统,并采用与目标控制系统对应的第五处理措施处理运行故障。
7、可选地,确定目标通信总线连接的目标控制系统,并采用与目标控制系统对应的第五处理措施处理运行故障,包括:在目标通信总线连接的目标控制系统的类型为vcu系统时,确定采用第二处理措施处理运行故障,并控制vcu系统退出自动驾驶状态;在目标通信总线连接的目标控制系统的类型为esc系统时,确定采用第三处理措施处理运行故障,并控制esc系统退出自动驾驶状态。
8、可选地,该方法还包括:在采用第一目标处理措施处理运行故障时,通过目标车辆的车辆显示系统展示目标控制系统发生运行故障的第一紧急提示信息;在采用第二目标处理措施处理运行故障时,通过目标车辆的车辆显示系统展示目标通信总线发生运行故障的第二紧急提示信息。
9、根据本技术实施例的另一方面,还提供了一种自动驾驶车辆的故障处理装置,包括:检测模块,用于检测目标车辆发生运行故障的故障组件,其中,目标车辆中包括多个控制系统,控制系统中包括以下至少之一:自动化驾驶had系统、车辆控制vcu系统、电子稳定控制esc系统,故障组件中包括以下至少之一:目标控制系统、多个控制系统之间的目标通信总线;第一处理模块,用于在故障组件为目标控制系统的情况下,采用第一目标处理措施处理运行故障,其中,第一目标处理措施包括:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态;第二处理模块,用于在故障组件为目标通信总线的情况下,采用第二目标处理措施处理运行故障,其中,第二目标处理措施中包括以下至少之一:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态、控制各个控制系统通过与目标通信总线相关联的冗余通信总线进行交互。
10、根据本技术实施例的另一方面,还提供了一种非易失性存储介质,该非易失性存储介质包括存储的程序,其中,非易失性存储介质所在设备通过运行该程序执行上述的自动驾驶车辆的故障处理方法。
11、根据本技术实施例的另一方面,还提供了一种电子设备,该电子设备包括:存储器和处理器,其中,存储器中存储有计算机程序,处理器被配置为通过计算机程序执行上述的自动驾驶车辆的故障处理方法。
12、在本技术实施例中,检测目标车辆发生运行故障的故障组件,其中,目标车辆中包括多个控制系统,控制系统中包括以下至少之一:自动化驾驶had系统、车辆控制vcu系统、电子稳定控制esc系统,故障组件中包括以下至少之一:目标控制系统、多个控制系统之间的目标通信总线;在故障组件为目标控制系统的情况下,采用第一目标处理措施处理运行故障,其中,第一目标处理措施包括:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态;在故障组件为目标通信总线的情况下,采用第二目标处理措施处理运行故障,其中,第二目标处理措施中包括以下至少之一:调整目标控制系统与其他控制系统的交互状态,并控制目标控制系统以及与目标控制系统相关联的其他控制系统退出自动驾驶状态、控制各个控制系统通过与目标通信总线相关联的冗余通信总线进行交互。
13、在上述过程中,通过对自动驾驶功能多系统的交互进行优化处理自动驾驶车辆的故障问题,有效避免相关技术对自动驾驶涉及的系统功能分配不合理以及故障后处理措施混乱的问题,同时,还可以有效避免对故障处理一刀切、过度处理等情况,进而解决了由于相关技术未对自动驾驶系统交互故障进行分析,导致自动驾驶车辆运行安全性较差的技术问题。
- 还没有人留言评论。精彩留言会获得点赞!