一种基于扩维并行滤波及分层判定的飞行器故障辨识方法
本发明涉及一种基于自适应滤波技术和分层判定技术的低耗时、高精度的飞行器在线故障辨识方法,可根据当前飞行器状态辨识出故障发生位置、故障模式和故障程度。
背景技术:
1、飞行器动力系统/执行机构元器件在复杂飞行环境的影响下,出现故障的概率急剧增大,对故障进行在线辨识是对其有效应对的基础。针对飞行器系统难以准确建模,故障信息缺乏先验知识,量测数据数量和质量受限等问题,现有故障辨识技术需要诸多传感器数据,模型复杂、故障辨识速度慢,故障程度辨识精度不足。亟需开发新的快速精准辨识方法。
技术实现思路
1、本发明的目的是为了解决现有飞行器故障辨识速度慢、精度差等问题,提供一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,通过研究模型/数据依赖程度低、快速、准确的在线故障辨识方法,提高故障辨识技术速度以及辨识精度,同时可以减少量测信息的依赖度,减少传感器的使用。
2、本发明的目的是通过以下技术方案实现的:
3、一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,所述方法步骤为:
4、步骤一:根据飞行器发动机推力系统和伺服机构工作状态分析推力系统/伺服机构典型故障模式,建立典型推挤故障模型tiout=kiti与典型伺服机构模型其中ti为第i个位置对应推力,ki为第i个位置对应推力的损伤系数,δi(t)为第i个位置对应伺服机构摆角,σi为第i个位置对应摆角的损伤系数,δki为第i个位置对应摆角卡死的角度,w为伺服机构摆角的随机值;
5、步骤二:分析故障前后飞行器状态量x轴位移x,y轴位移y,z轴位移z,x轴速度vx,y轴速度vy,z轴速度vz,x轴姿态角速度ωx,y轴姿态角速度ωy,z轴姿态角速度ωz,第i个位置对应推力ti,第j个位置对应伺服机构摆角θj的变化,针对各种故障模型建立多个带有故障的无偏动力学模型,建立系统状态方程与量测方程
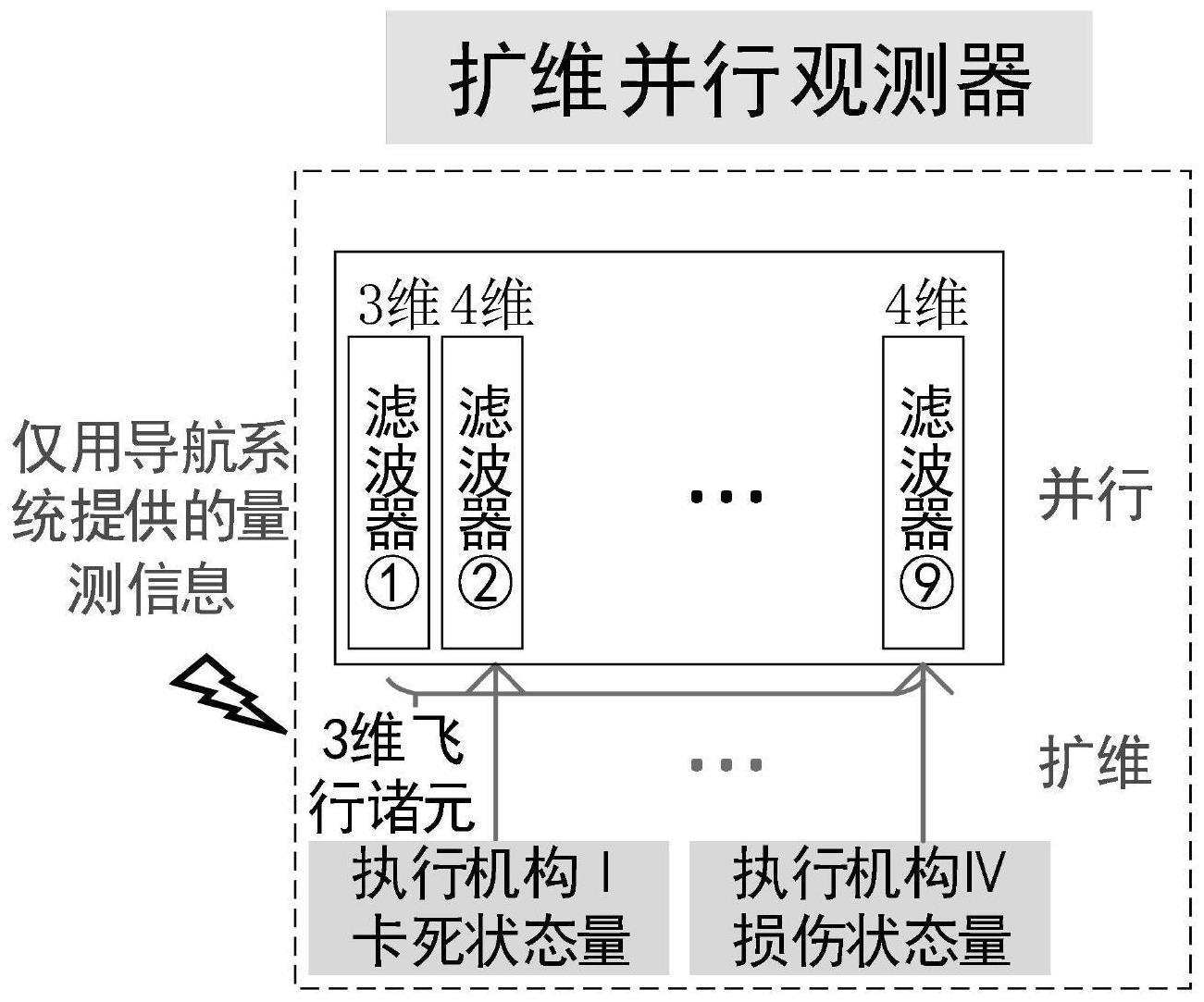
6、步骤三:将主发动机的推力ti、各个发动机的伺服机构的摆角θj作为扩维状态量分别增广到多个低维滤波器的状态量xt=[ωx,ωy,ωz,ti],xθ=[ωx,ωy,ωz,θj]中,其中xt表示推力ti扩维的状态量,xθ表示伺服机构摆角θj扩维的状态量,多个滤波器同时运行来获取发动机推力估计值和伺服机构摆角估计值
7、步骤四:通过总推力观测器估计结果进行第一层判定,若出现推力故障则停用伺服机构观测器,通过扩维单发推力观测器xt=[ωx,ωy,ωz,ti]进行第二层判定,获得故障发生位置及故障程度,若无推力故障则停用推力观测器,进入伺服机构故障判断;
8、步骤五:伺服机构故障判断首先根据观测器估计参数的误差si与协方差ri确定故障发生位置,停止未发生故障位置的伺服机构观测器进行第三层判定,通过增广伺服机构观测器xθ=[ωx,ωy,ωz,θj]获得摆角估计值确定故障模式及故障程度。
9、进一步地,步骤二中,所述系统状态方程与量测方程具体为:
10、步骤二一:设置系统的状态向量x=[ωx ωy ωz]t与系统的输出量其中表示x轴姿态角速度输出量,表示y轴姿态角速度输出量,表示z轴姿态角速度输出量;
11、步骤二二:根据火箭绕质心动力学方程及运动学方程建立状态方程与量测方程:
12、
13、其中,a表示系统矩阵,b表示系统的控制矩阵,c表示系统的输出矩阵,d(t)表示系统的扰动向量,ed表示扰动转换矩阵,x(t)表示系统的状态量,u(t)表示系统的控制向量,y(t)表示系统的量测量。
14、进一步地,步骤三中,对每个滤波观测器的扩维增广步骤如下:
15、步骤三一:设计发动机推力扩维的状态量xt=[wx,wy,wz,tj];
16、步骤三二:系统姿态动力学模型表示为如下形式:
17、
18、y=[i 0]x+v
19、其中,x为状态向量,f(x)为状态向量的非线性函数向量,b为系统的控制矩阵,t作为发动机喷管推力向量,是系统的输入向量,t=[t1 t2]t,w为系统的状态扰动向量,y为系统的测量向量,v为系统的测量噪声向量,i是单位矩阵,t1是一号发动机对应的推力,t2是二号发动机对应的推力,m1是推力t1产生的转动力矩,m2是推力t2产生的转动力矩;
20、步骤三三:设计伺服机构扩维状态变量:xθ=[wx,wy,wz,θj],伺服机构扩维状态方程的设计和推力扩维方式相同。
21、进一步地,所述步骤四具体为:
22、步骤四一:在每一时刻,通过导航系统输入的信息对系统进行状态更新和量测更新修正,各部分滤波观测器正常运行,其中总推力观测器对飞行器总推力进行估计,判断是否发生推力故障,若出现推力故障,进入步骤四二;若无推力故障,进入步骤四三;
23、步骤四二:出现推力故障,则停用伺服机构部分扩维滤波器,通过扩维单发推力观测器对各发动机推力进行估计,进而确定推力故障发生位置和故障程度;
24、步骤四三:无推力故障,则停用推力部分扩维观测器,进入伺服机构故障判断。
25、进一步地,所述步骤五具体为:
26、步骤五一:伺服机构故障判断首先根据伺服机构观测器估计参数的误差si与协方差ri确定故障发生位置,计算方式:
27、
28、其中,φ为误差求解矩阵,φ(i,:)为φ的第i行元素构成的向量,满足φ=αmp,其中α为矩阵分配系数,mp为转动力矩分配矩阵,表示伺服机构摆角变化带来的力矩,[δc0,δc1,δc2,δc3]为一台发动机对应的两个伺服机构摆角的x、y方向分量,rx、ryz分别表示发动机距飞行器质心距离在x轴和y轴/z轴(飞行器轴对称)上的投影,pc表示单个发动机推力,jx、jyz分别表示飞行器x轴和y轴/z轴的转动惯量;
29、步骤五二:停用未发生故障位置的伺服机构观测器,进行第三层判定,通过伺服摆角扩维观测器获得摆角估计值确定伺服机构故障模式及故障程度。
30、本发明相对于现有技术的有益效果是:
31、(1)采用扩维并行滤波的方式,能够较大程度的降低计算量,提高辨识速度,并且不需要增加量测传感器,仅依靠上面级导航系统提供的信息就可以实现快速准确的状态估计。
32、(2)采用故障发生位置/故障模式/故障程度分层判定方法,逐渐剪除观测器的无效分支,降低计算量,提高辨识速度与辨识精度。
技术特征:
1.一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,其特征在于:所述方法步骤为:
2.根据权利要求1所述的一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,其特征在于:步骤二中,所述系统状态方程与量测方程具体为:
3.根据权利要求1所述的一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,其特征在于:步骤三中,对每个滤波观测器的扩维增广步骤如下:
4.根据权利要求1所述的一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,其特征在于:所述步骤四具体为:
5.根据权利要求1所述的一种基于扩维并行自适应滤波及分层判定技术的飞行器故障快速精准辨识方法,其特征在于:所述步骤五具体为:
技术总结
一种基于扩维并行滤波及分层判定的飞行器故障辨识方法,本发明的目的是为了解决现有飞行器故障辨识速度慢、精度差等问题,通过研究模型/数据依赖程度低、快速、准确的在线故障辨识方法,提高故障辨识技术速度以及辨识精度,同时可以减少量测信息的依赖度,减少传感器的使用。本发明采用扩维并行滤波的方式,能够较大程度的降低计算量,提高辨识速度,并且不需要增加量测传感器,仅依靠上面级导航系统提供的信息就可以实现快速准确的状态估计。采用故障发生位置/故障模式/故障程度分层判定方法,逐渐剪除观测器的无效分支,降低计算量,提高辨识速度与辨识精度。
技术研发人员:浦甲伦,韦常柱,朱光楠,刘哲,孙智力,刘权
受保护的技术使用者:哈尔滨工业大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!