一种提高磁导航AGV横移精度的方法与流程
本技术涉及agv导航,具体涉及一种提高磁导航agv横移精度的方法。
背景技术:
1、随着工业自动化智能工厂的发展,若想要提高生产力增强竞争力,agv(自动导向车)发挥着不可忽视的作用。agv作为自动化升级重要的核心组成,被广泛应用于制造企业的仓储、生产等核心业务环节。由于agv技术的发展,agv应用的场景也越来越复杂,agv的行驶轨道已经是多岔路口、多站点的轨道了。
2、由于工厂区域限制,难免会出现需要横移送物料的情况,此时就要求agv必须平稳均衡的将物料运输到指定位置,由于agv的对接设备大多为工业机器人,因此agv需要在横移过程中以及停止区域保持前后无偏差,并在指定精度下完成停车,以便机器人抓取物料。这就需要agv的主控器根据传感器实时反馈值分配四轮速度,以减小横移偏差。目前,现有技术常仅采用两个电位计进行横移导航的前后驱动各自纠偏,但在纠偏时,agv的四个轮子各自纠偏,这就很容易产生相互拉扯的情况,导致agv横移精度较低且故障率高。
技术实现思路
1、本技术提供了一种提高磁导航agv横移精度的方法,避免agv的四个轮子产生相互拉扯的情况,提高了agv横移精度,该技术方案如下。
2、一方面,提供了一种提高磁导航agv横移精度的方法,所述方法应用于所述agv中,所述agv上安装有陀螺仪,所述方法包括:
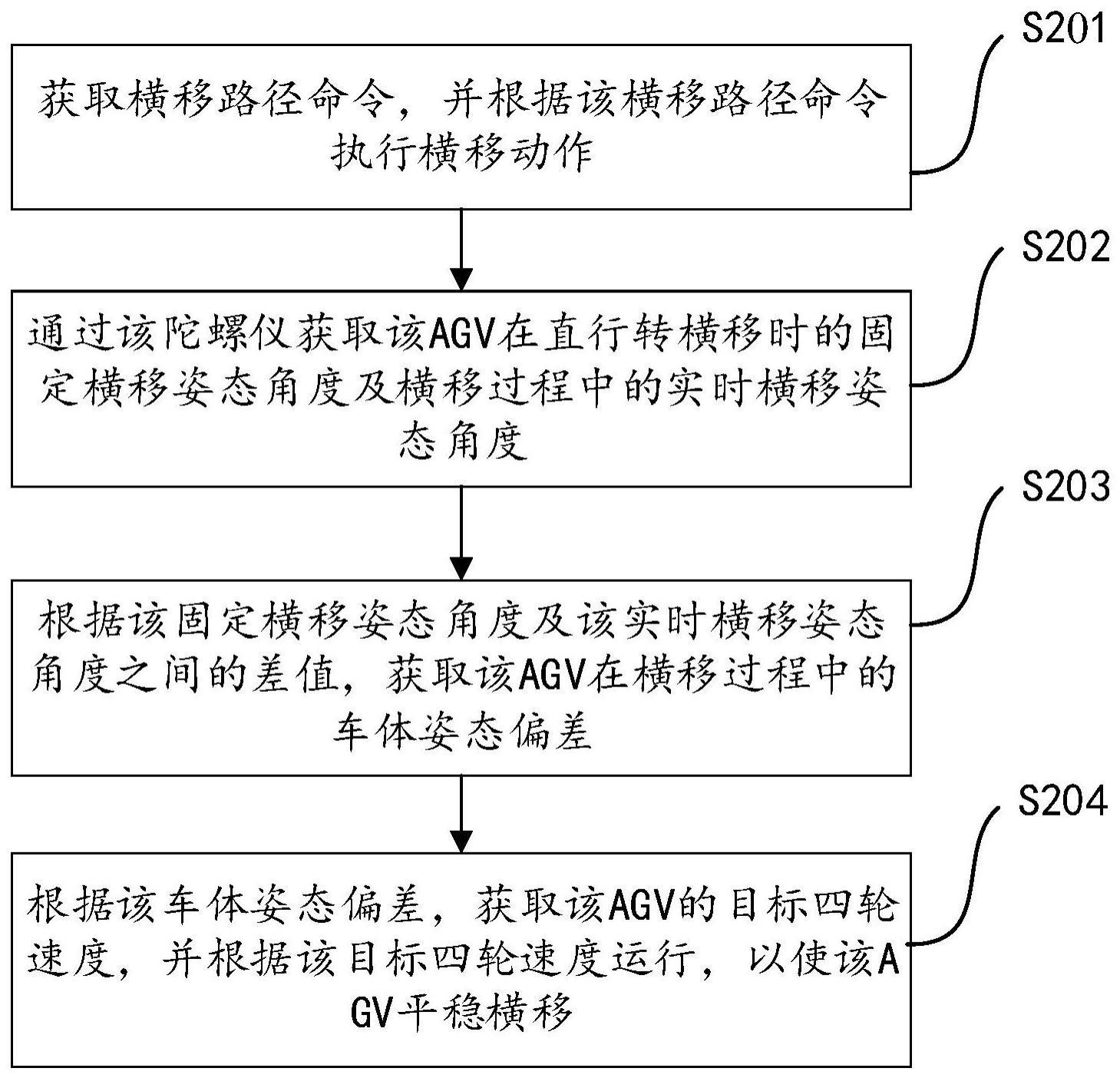
3、获取横移路径命令,并根据所述横移路径命令执行横移动作;
4、通过所述陀螺仪获取所述agv在直行转横移时的固定横移姿态角度及横移过程中的实时横移姿态角度;
5、根据所述固定横移姿态角度及所述实时横移姿态角度之间的差值,获取所述agv在横移过程中的车体姿态偏差;
6、根据所述车体姿态偏差,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移。
7、在一种实施方式中,所述根据所述车体姿态偏差,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移,包括:
8、当所述车体姿态偏差在目标偏差范围内时,维持所述agv的当前四轮速度进行运行,以使所述agv平稳横移。
9、在一种实施方式中,所述agv包括前驱动单元及后驱动单元,所述前驱动单元及所述后驱动单元上分别安装有电位计;所述根据所述车体姿态偏差,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移,包括:
10、当所述车体姿态偏差不在目标偏差范围内时,通过所述电位计获取车轮角度反馈值;
11、根据所述车体姿态偏差,分别获取所述前驱动单元的中间速度及所述后驱动单元的中间速度;
12、根据所述前驱动单元的中间速度、所述后驱动单元的中间速度及所述车轮角度反馈值,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移。
13、在一种实施方式中,所述获取横移路径命令,并根据所述横移路径命令执行横移动作,包括:
14、获取上位机发送的横移路径命令,并获取所述agv的位置信息;所述横移路径命令包括初始横移位置及横移指定位置;
15、当所述agv到达所述初始横移位置时,获取所述agv在所述初始横移位置下的陀螺仪角度初始值;
16、根据所述横移路径命令、所述陀螺仪角度初始值及所述位置信息,执行横移动作。
17、在一种实施方式中,所述获取上位机发送的横移路径命令,并获取所述agv的位置信息,包括:
18、获取物料配送任务的行使路线,并在待命区等候所述上位机发送的横移路径命令;所述行使路线包括待命区、出发路径、横移区域、上料区域和回归路线;
19、在所述待命区接收到所述横移路径命令后,经所述出发路径进入所述横移区域;所述横移区域包括电子标签卡;
20、获取所述电子标签卡内的电子标签值,并根据所述电子标签值获取所述agv的位置信息。
21、在一种实施方式中,在所述根据所述横移路径命令及所述陀螺仪角度初始值,执行横移动作之后,所述方法还包括:
22、当所述agv横移到所述横移指定位置,且完成物料配送后,返回至所述待命区,以等待下一个执行命令。
23、在一种实施方式中,所述根据所述横移路径命令、所述陀螺仪角度初始值及所述位置信息,执行横移动作,包括:
24、根据所述横移路径命令、所述陀螺仪角度初始值及所述位置信息,获取所述agv的横移方向及横移角度;
25、根据所述横移方向及所述横移角度,执行横移动作。
26、又一方面,提供了一种agv,所述agv包括前驱动单元及后驱动单元,所述agv上安装有陀螺仪;所述前驱动单元及所述后驱动单元上分别安装有电位计;
27、所述agv用于:
28、获取横移路径命令,并根据所述横移路径命令执行横移动作;
29、通过所述陀螺仪获取所述agv在直行转横移时的固定横移姿态角度及横移过程中的实时横移姿态角度;
30、根据所述固定横移姿态角度及所述实时横移姿态角度之间的差值,获取所述agv在横移过程中的车体姿态偏差;
31、根据所述车体姿态偏差,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移。
32、再一方面,提供了一种提高磁导航agv横移精度的装置,所述装置包括:
33、横移路径命令获取模块,用于获取横移路径命令,并根据所述横移路径命令执行横移动作;
34、横移姿态角度获取模块,用于通过陀螺仪获取所述agv在直行转横移时的固定横移姿态角度及横移过程中的实时横移姿态角度;
35、车体姿态偏差获取模块,用于根据所述固定横移姿态角度及所述实时横移姿态角度之间的差值,获取所述agv在横移过程中的车体姿态偏差;
36、平稳横移模块,用于根据所述车体姿态偏差,获取所述agv的目标四轮速度,并根据所述目标四轮速度运行,以使所述agv平稳横移。
37、又一方面,提供了一种计算机设备,所述计算机设备包括处理器和存储器,所述存储器中存储有至少一条指令,所述至少一条指令由所述处理器加载并执行以实现如上所述的一种提高磁导航agv横移精度的方法。
38、再一方面,提供了一种计算机可读存储介质,所述存储介质中存储有至少一条指令,所述至少一条指令由处理器加载并执行以实现如上所述的一种提高磁导航agv横移精度的方法。
39、本技术提供的技术方案可以包括以下有益效果:
40、该agv上安装有陀螺仪,该agv获取横移路径命令,并根据该横移路径命令执行横移动作;在横移过程中,通过该陀螺仪获取该agv在直行转横移时的固定横移姿态角度及横移过程中的实时横移姿态角度;根据该固定横移姿态角度及该实时横移姿态角度之间的差值,获取该agv在横移过程中的车体姿态偏差;根据该车体姿态偏差,获取该agv的目标四轮速度,并根据该目标四轮速度运行,以使该agv平稳横移。上述方案通过陀螺仪进行横移姿态控制,显著提高双差速磁导agv横移时的稳定性和导航定位精度,避免agv横移时前后驱动各自纠偏而产生相互拉扯的情况,提高了agv横移精度,降低了事故发生率。
- 还没有人留言评论。精彩留言会获得点赞!