一种面向飞行器复合机动动作的飞控指令生成方法
本发明属于飞行器控制,涉及一种面向飞行器复合机动动作的飞控指令生成方法。
背景技术:
1、根据空战中的飞机的机动方式,美国学者提出了包含七个基本机动动作的动作库:1)最大加速,2)最大减速,3)最大过载爬升,4)最大过载俯冲,5)最大过载左转,6)最大过载右转,7)稳定飞行(各控制量不变)。复合机动由多段基本机动构成,在进行如桶滚、半筋斗等复合动作时弹道倾角、弹道偏角、滚转角数值会发生±180°或±360°的反转,使得依赖角度误差反馈的自动驾驶仪失效。现有方案多将一个完整的复合机动动作分为多段,每段为单独的基本机动动作,以条件状态转移的形式分段地生成飞控指令。此方法实现方式较为复杂,对每种复合机动都要进行单独设计,且需设计机动进入与中途退出的条件与控制律。
2、飞行器的自动驾驶仪系统一般有两回路(速率陀螺、加速度计)或三回路(速率陀螺、伪攻角滤波、加速度计)结构,该自动驾驶仪结构简单、可靠性高。但是现有的自动驾驶仪无法处理大范围复合机动动作中弹道倾角、弹道偏角、滚转角数值会发生±180°或±360°的反转带来的角度误差量的大幅变化,需要改变角度反馈的计算方式,方能使得飞行器复合机动动作得到可靠控制。
技术实现思路
1、要解决的技术问题
2、为了避免现有技术的不足之处,本发明提出一种面向飞行器复合机动动作的飞控指令生成方法。
3、技术方案
4、一种面向飞行器复合机动动作的飞控指令生成方法,其特征在于生成步骤如下:
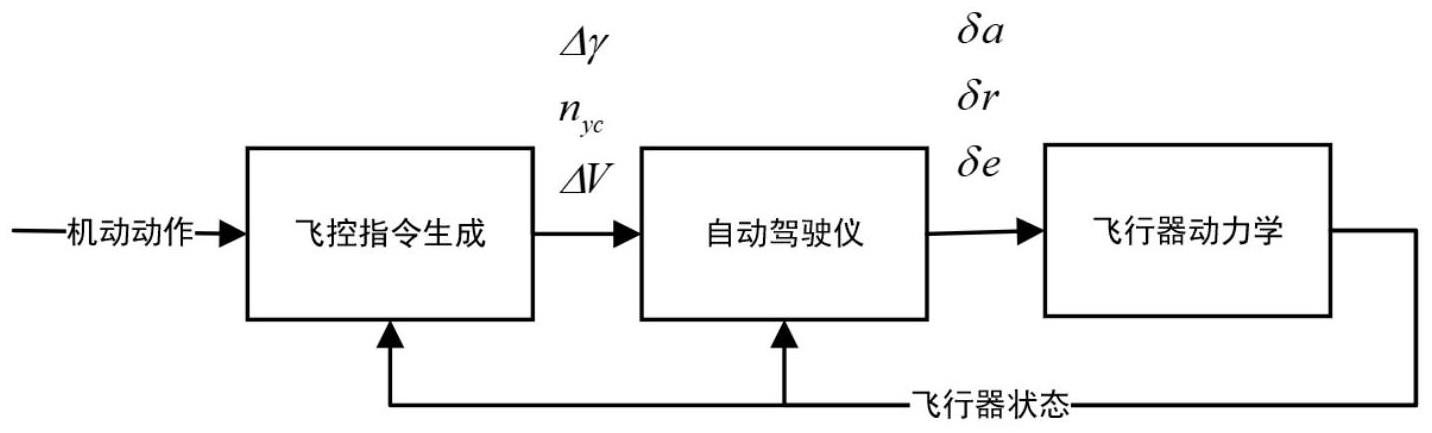
5、步骤1:根据所设计的机动动作生成弹道倾角控制指令θc、弹道偏角指令ψvc与速度指令vc;
6、步骤2:根据弹道倾角控制指令θc计算弹道倾角误差δθ,以弹道倾角误差的比例微分pd输出作为铅垂平面内的过载指令ny2,实现对弹道倾角指令的跟踪:
7、
8、其中:θ为弹道倾角,kθ、kθ为pd控制器增益,[-nymin,nymax]为过载指令ny2的上下限;
9、根据弹道偏角指令计算弹道偏角误差δψ,以弹道偏角误差的pd输出作为水平平面内的过载指令nz2,实现对弹道偏角指令的跟踪;
10、
11、其中:ψ为飞机当前弹道偏角,kψ、为pd控制器增益,[-nzmax,nzmax]为nz2上下限,δph为设定的小量,这里设为0.01(rad)
12、步骤3:依照倾斜转弯关系,将铅垂平面内的过载指令ny2和水平平面内的过载指令nz2,转化为纵向过载指令nyc,滚转角指令nzc:
13、当时:
14、
15、当时:
16、
17、确定δγ方向的计算:
18、
19、
20、δγ=δγ-π
21、else
22、δγ=δγ+π
23、其中:γc为滚转角控制信号、nyc为速度系y方向过载控制信号、nzc为速度系y方向过载控制信号、δn为设定的小量,这里设为0.1;
24、步骤4:将纵向过载指令nyc,滚转角指令nzc输入自动驾驶仪,实现了飞机自动执行复合机动。
25、所述步骤1的机动动作包括但不限于:s形机动、急拉起、斜拉起、下降急转、桶滚,筋斗或半筋斗。
26、所述步骤1的机动动作采用s形机动时:以正弦信号作为弹道偏角指令,参数为最大弹道偏角ψmax,正弦信号角速度ω、相位ψ0,所述步骤1机动动作的参数根据下述公式计算:
27、
28、所述步骤1的机动动作采用急拉起时:以高度的pid输出生成弹道倾角指令,计算方法如下,参数为目标高度hdes,最大弹道倾角θmax,初始速度v0,初始弹道偏角ψ0,h为当前高度,kh,kih为pid控制器增益;所述步骤1机动动作的参数根据下述公式计算:
29、
30、所述步骤1的机动动作采用斜拉起时:参数为期望弹道倾角θdes且θdes>0,期望弹道偏角ψdes,v0为初始速度;所述步骤1机动动作的参数根据下述公式计算:
31、
32、所述步骤1的机动动作采用下降急转即飞机俯冲下降同时进行转弯,视为反向的斜拉起时,参数为期望弹道倾角θdes且θdes<0,期望弹道偏角ψdes,v0为初始速度,v0为初始速度;所述步骤1机动动作的参数根据下述公式计算:
33、
34、所述步骤1的机动动作采用桶滚时:桶滚即飞机以参考直线为圆柱轴线,在圆柱轴线方向上以速度a匀速前进,在圆柱底面投影上做半径为b的圆周运动,参数为桶滚角速度ω,dx为轴线方向前进速度、dy为速度在圆柱底面投影的竖直方向分量、dz为速度在圆柱底面投影的水平方向分量、ψ0为初始弹道偏角、v0为初始速度;所述步骤1机动动作的参数根据下述公式计算:
35、
36、所述步骤1的机动动作采用筋斗、半筋斗机动时,分为两段的飞控指令生成方法,与两段间的状态转移条件,飞控指令指弹道偏角ψc、弹道倾角指令θc;
37、所述半筋斗指筋斗机动到达最高顶点时,飞机滚转180°,以平飞姿态改出,此时飞机航向与进入筋斗时相反;弹道倾角θ定义在上,给出δθ作为控制量;即θc=δθ+θ;动作开始后,设定δθ为常值设为30°;所述步骤1机动动作的参数根据下述公式计算:
38、
39、当机动动作满足弹道偏角与初值反向且弹道倾角为0后,改平;
40、将飞机提前控制改平,以θc为判定依据,所述步骤1机动动作的参数根据下述公式计算;
41、if|θc|<δjd1 and cos(ψ-ψ0)<-1+δjd2
42、then:
43、
44、δjd1、δjd2为设定的小量,这里设为0.01(rad)。
45、所述步骤1的机动动作采用筋斗时:筋斗机动即飞机持续拉起,在铅垂平面内画圈,以平飞姿态改出;
46、以通过筋斗顶端为标志将筋斗机动分为两段:
47、第一段与半筋斗相同,以固定的δθ为输入,但通过筋斗顶端时不改出,进入下一段,所述步骤1机动动作的参数根据下述公式计算:
48、
49、第二段控制逻辑与第一段相同,所述步骤1机动动作的参数根据下述公式计算:
50、if|θc|<δjd1 and cos(ψ-ψ0)<-1+δjd2
51、then:
52、
53、当θc在0附近、ψ与ψ0方向相同时以平飞姿态改出,所述步骤1机动动作的参数根据下述公式计算:
54、if|θc|<δjd1 and cos(ψ-ψ0)>1-δjd2
55、then:
56、
57、有益效果
58、本发明提出的一种面向飞行器复合机动动作的飞控指令生成方法,首先设计了面向飞行器复合机动动作的弹道偏角、弹道倾角指令生成方法。然后设计了将弹道偏角、弹道倾角指令解算为内环俯仰、偏航、滚转三通道自动驾驶仪输入的计算方法。通过上述方法实现了飞机自动执行复合机动。
59、本发明的面向复合机动动作的飞控指令生成方法能稳定、快速控制飞行器执行各种机动动作。主流方法通常将复合机动动作分为多段(超过三段),每段有不同的飞控指令生成方法。主流方法对每个机动动作都要进行单独设计,需要调节的参数也更多,工作量巨大。本发明中生成飞控指令的方法更为简单,仅有半筋斗与筋斗需要将机动过程分为两段、其余机动不需为机动过程分段。本发明的方法能控制飞机自动完成包括但不限于s形机动、急拉起、斜拉起、下降急转、桶滚,筋斗、半筋斗等复合机动。
- 还没有人留言评论。精彩留言会获得点赞!