一种基于复合积分控制的滚珠丝杠传动误差补偿方法
本发明属于机械工程,具体为一种基于复合积分控制的滚珠丝杠传动误差补偿方法。
背景技术:
1、在机械工程领域中,滚珠丝杠传动系统广泛应用于各种精密定位和运动控制系统中。传统的滚珠丝杠传动系统控制方法主要包括比例积分微分(pid)控制、经验模态分解(emd)方法等。然而,这些传统方法存在一定的局限性,无法充分考虑到传动系统中的非线性因素、动态响应特性以及传动误差的动态变化,从而导致传动系统的控制性能下降,无法满足高要求的应用场景,特别是需要高速、高精度和高可靠性的工业自动化系统。
2、在传统的pid控制方法中,只考虑了当前误差和误差的积分和微分项,而忽略了非线性因素和传动误差的动态变化。这导致pid控制方法在面对滚珠丝杠传动系统中的非线性摩擦力、刚度、导程误差和弹性变形等问题时,性能受限,无法有效地抑制传动误差。另一方面,基于经验模态分解(emd)方法的传动系统控制也有一定局限性。emd方法通过将信号分解为多个本征模态函数(imf),提取信号中的不同频率成分。然后对每个imf进行分析和处理。然而,在实际应用中,emd方法存在模态混叠和降噪困难等问题,对于非平稳和非线性系统,其性能会不稳定。
3、现有技术如下:
4、与专利cn105305913a“一种新型的用于滚珠丝杠进给系统的抗扰跟随控制器”的技术对比
5、专利cn105305913a中采用的是自抗扰技术与比例积分控制实现了电机位置和负载位置的精确控制。而我们采用的是积分与滑模控制实现了电机位置和负载位置的精确控制。自抗扰技术与比例积分控制中,为了实现抗干扰和鲁棒性能,需要引入较大的抗扰增益,这会导致系统的响应速度减慢。相比之下,我们采用的积分与滑模控制能够通过合适的滑模面设计和积分项的引入,实现更快的系统响应。
6、专利cn105305913a中采用的是扩张状态观测器评估总扰动。相比于扩张状态观测器,我们采用的总扰动观测器形式更加简单。扩张状态观测器的性能和鲁棒性高度依赖于参数的选择和调节。不当的参数选择可能导致观测器性能下降或稳定性问题。而我们采用的观测器参数可以通过经验或一些标准方法进行调节,调节这些参数相对简单,降低了系统调试和参数调节的难度。更容易实现对不同干扰和系统变化的鲁棒性设计,使得积分与滑模控制在应对系统不确定性和干扰时更具灵活性。
7、与专利cn103837339a“一种动态伺服力驱动系统”的技术对比;
8、专利cn103837339a采用的是线性滑模面的滑模控制实现动态高精度加载,而我们采用的是积分滑模面的滑模控制实现动态高精度加载。线性滑模面的补偿能力受限,对于系统参数变化较大的情况可能无法提供足够的补偿力度,特别是在需要高精度控制的应用中,该专利附图中的最大误差为15%,而我们采用的积分滑模控制最大误差为0.012%,积分滑模面能够积累误差,并在滑模面上施加更强的补偿力度。这有助于减小系统误差,提高控制精度和稳定性。
9、专利cn103837339a与我们采用的方法都是采用带扰动观测器滑模控制,但是我们的扰动观测器形式更简单,能检测并补偿任何外部扰动,只有一个调整参数,而专利cn103837339的扰动观测器形式相对复杂,需要调整的参数有三个,增加了系统的设计和调试难度,并增加了实施控制方法的复杂性。复杂的观测器结构和参数数量较多会导致较高的计算负荷,特别是在实时控制系统中会受到限制。
10、与专利cn107505914a“一种考虑滚珠丝杠进给系统高阶动态特性的高精运动控制方法”的技术对比;
11、专利cn107505914a采用的是采用高阶模态滤波控制器和零相差跟随控制算法实现进给系统的跟随精度和运动平稳性,而我采用的是积分与滑模控制实现进给系统的跟随精度和运动平稳性。该专利中的方法涉及高阶模态滤波控制器的设计和参数优化,以及零相差跟踪控制器的设计和嵌入,该方法较复杂需要更多的设计和调试时间。该方法还涉及频域分析、模态叠加式计算和参数优化等计算步骤,对控制系统的实时性能和计算能力提出要求。我们采用的积分与滑模控制算法同样能实现高精度控制,而且相对简单,在计算负荷方面相对较低,更适用于资源受限的实时控制环境。
12、专利cn107505914a需要对滚珠丝杠进给系统进行模态分析,并确定各阶模态参数。这要求对系统的动态特性有较好的了解,并需要准确的参数估计。相比之下,我们的积分与滑模控制方法不需要对系统的动态特性进行详细分析,而是通过误差观测器和积分控制器来实现误差补偿,更加灵活和容易实施。
13、本发明综合考虑了滚珠丝杠传动系统中的非线性因素、动态响应特性以及传动误差的动态变化。通过建立相应的模型来估计各种因素,从而更全面地分析和控制传动系统的性能。引入积分滑模面和误差观测器的设计,能够有效减小滚珠丝杠传动误差,并提高系统的抗干扰能力。积分滑模面通过对误差进行积分来实现更精确的误差补偿,从而减小误差的影响。误差观测器能够实时估计系统中的各种干扰和变化,通过对估计误差的补偿来保持系统的稳定性。该方法具有较强的鲁棒性,能够对摩擦力、切削力等干扰的变化具有良好的适应性。传统方法往往无法有效处理这些干扰对系统性能的影响,而复合积分控制方法通过积分滑模面和误差观测器的设计,能够实时跟踪和补偿这些干扰,提高系统的抗干扰能力。
技术实现思路
1、为了减小滚珠丝杠传动的跟踪误差,本发明提出了一种基于复合积分控制的滚珠丝杠传动误差补偿方法,建模中考虑了摩擦力、导程误差、弹性变形等因数和外部干扰的影响,减小了跟踪误差,提高系统的抗干扰能力,对摩擦力、切削力等干扰的变化具有鲁棒性。
2、为实现上述目的,本发明采取的技术方案是:
3、一种基于复合积分控制的滚珠丝杠传动误差补偿方法,包括如下步骤:
4、步骤1,对滚珠丝杠驱动器的非线性摩擦以及轴向和扭转振动进行了建模;
5、步骤2,对导程误差进行建模,其表现出一个重复的正弦模式与位置相关的偏移,建立的模型;
6、步骤3,建立滚珠丝杠传动器的简化模型,根据所建立的简化动态模型对弹性变形进行建模:
7、步骤4,确定工作台位置和控制信号关系;
8、步骤5,定义积分滑模面;
9、步骤6,假设滚珠丝杠传动的惯性和粘性阻尼变化缓慢且不显著,外部扰动的变化认为是恒定的,而且是有界的;
10、步骤7,定义李雅普诺夫函数;
11、步骤8,定义李雅普诺夫函数的一阶导数:
12、步骤9,得复合积分控制律形式;
13、步骤10,为了确保为弹性变形估计而建立的二次正反馈回路不会危及整个系统的稳定性,需要引入低通滤波器,降低弹性变形估计速度,
14、步骤11,为了防止应用零速度位置命令时闭环系统进入极限环,还需要一个死区滤波器;
15、步骤12,为确保闭环控制不危及滚珠丝杠传动的安全运行,需对回路传递函数进行频域稳定性分析,采用奈奎斯特稳定性判据。
16、作为本发明进一步改进,所述步骤1具体如下:
17、1.1非线性摩擦力的模型如下:
18、
19、其中,ω是电机角速度,ω为速度常数,ka是放大器增益,kt是电机转矩常数,ts为静摩擦力矩,td为电机转速相关的动态摩擦力矩,使得ts+td为总库仑摩擦力矩;
20、1.2假设驱动器第一个轴向模态为fa,前三个扭转模态为ft1、ft2和ft3,设计陷波滤波器来衰减第一和第二扭转模态,陷波滤波器的形式如下:
21、
22、其中,ω1=2πft1表示第一个扭转模态的自然频率,ω2=2πft2表示第二个扭转模态的自然频率,ζ是陷波滤波器的阻尼比,其值根据陷波宽度的选择而确定。
23、2.根据权利要求1所述的一种基于复合积分控制的滚珠丝杠传动误差补偿方法,其特征在于,所述步骤2建立模型如下:
24、
25、其中,x为标称轴位置,a为导程误差大小,hp为滚珠丝杠螺距,ф调整位置相位,c0和c1为线性插值参数,用于调整位置相关偏移。
26、作为本发明进一步改进,所述步骤3具体如下:
27、3.1滚珠丝杠传动器的简化模型由以下公式表示:
28、
29、其中,m1,m2分别是电机和工作台的等效惯性,b1表示电机和轴承处的粘性阻尼,b2表示导轨处的粘性阻尼,ut为电机到工作台的传递扭矩,u为控制信号,rc为摩擦力分布因子,且0≤rc≤1,d为外部干扰,x1、分别为电机的位移、速度、加速度,x2、分别为工作台侧的位移、速度、加速度。
30、3.2传动器的等效轴向柔度,即等效轴向刚度的倒数表达式如下:
31、
32、其中,p1,p2由静态加载试验确定,p1表示等效轴向柔度函数中的常数项。它代表了在工作台位置变化时的基准柔度逆值。p2表示等效轴向柔度函数中与工作台位置线性相关的系数。它表明工作台位置变化对等效轴向柔度的贡献程度。
33、3.3弹性变形由传递扭矩除以等效轴向刚度得到,由如下公式表示:
34、
35、ut由式(4)得到:
36、
37、将式(5)和式(7)带入式(6),得到的弹性变形模型如下:
38、
39、作为本发明进一步改进,所述步骤7李雅普诺夫函数定义如下:
40、
41、所述步骤8李雅普诺夫函数的一阶导数如下:
42、
43、将式(11)和式(12)带入式(15)得:
44、
45、其中而由于式(13)的限制总是小于等于0,以下表达式将保证渐近稳定,即
46、
47、其中,ks为反馈增益。
48、作为本发明进一步改进,所述步骤9复合积分控制律形式由式(17)、式(11)和式(12)得到具体如下:
49、
50、将控制律写成前馈和反馈的形式,前馈为反馈的形式如下:
51、
52、作为本发明进一步改进,所述步骤10低通滤波器滤波器形式如下:
53、
54、其中,fc为截止频率,由稳定性分析和跟踪试验得到。
55、作为本发明进一步改进,所述步骤11死区滤波器形式如下:
56、
57、其中,vmin为速度的阈值,当速度指令的绝对值小于vmin时,死带滤波器的输出被设为零,从而防止系统在非常小的速度指令期间进入极限环。
58、作为本发明进一步改进,所述步骤12影响闭环控制系统稳定性的回路传递函数形式如下:
59、l(s)=ggngf-fgf(gf+jes2+bes) (22)
60、其中,g为传动器传递函数,f为弹性变形补偿的轴向柔性。
61、本发明采用以上技术方案与现有技术相比,具有以下技术效果:
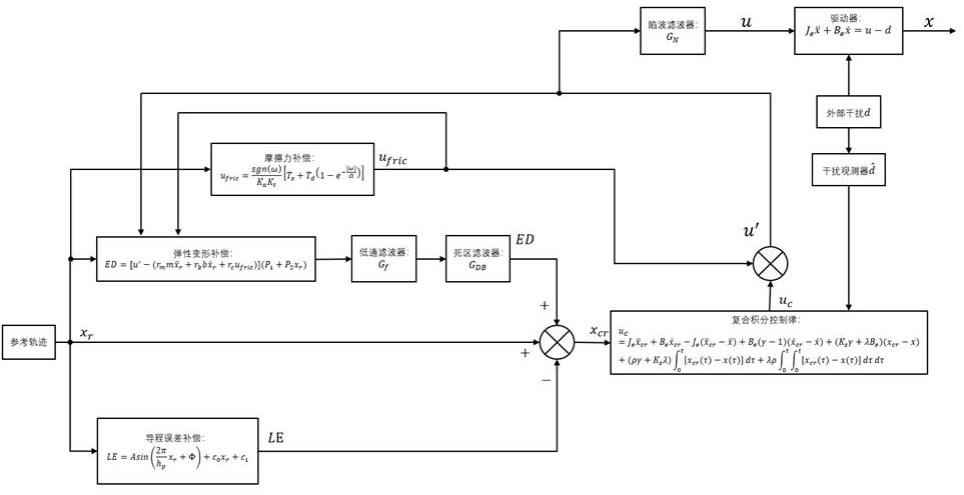
62、本发明提出了一种复合积分控制的滚珠丝杠传动误差补偿方法,通过摩擦力ufric、导程误差le、弹性变形ed等模型估计各种因素,并设计积分滑模面s和误差观测器得到复合积分控制律uc,以减小误差并提高系统的抗干扰能力,保证闭环系统的稳定性。该方法能够有效减小滚珠丝杠传动误差,并对摩擦力、切削力等干扰的变化具有鲁棒性,提升了传动系统的精度和性能。
- 还没有人留言评论。精彩留言会获得点赞!