车辆的控制方法、训练方法、装置、车辆、服务器及介质与流程
本技术涉及车辆,更具体而言,涉及一种车辆的控制方法、模型的训练方法、车辆的控制装置、模型的训练装置、车辆、服务器及计算机可读存储介质。
背景技术:
1、相关技术,车辆根据摄像头拍摄得到的点云数据来识别道路及周边的物体,并以此生成相应的避障指令。然而,因通过摄像头得到的点云数据较为稀疏性,故根据点云数据识别的车外对象的准确率不高。
技术实现思路
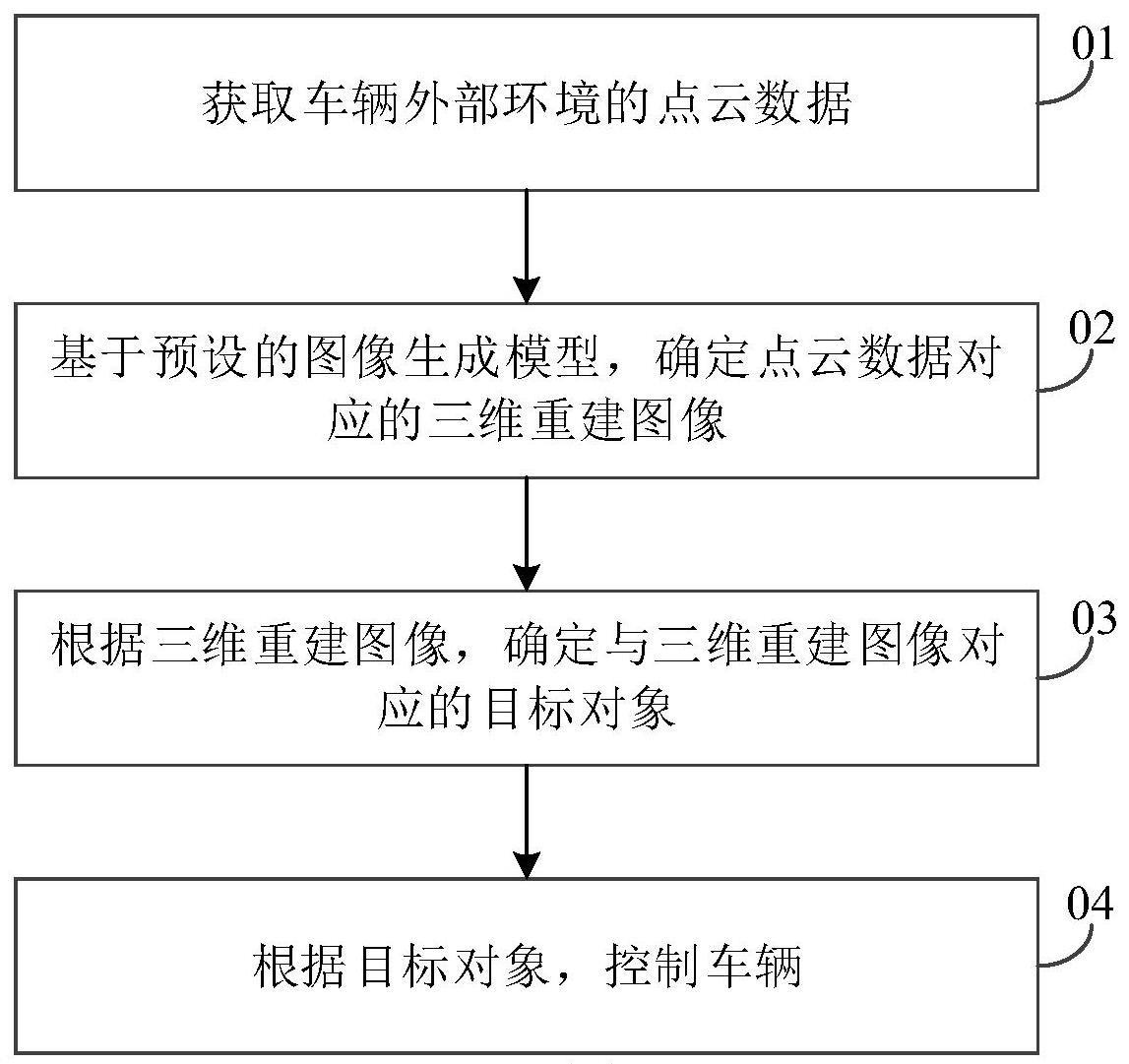
1、本技术实施方式提供一种车辆的控制方法,包括:
2、获取车辆外部环境的点云数据;
3、基于预设的图像生成模型,确定所述点云数据对应的三维重建图像;
4、根据所述三维重建图像,确定与所述三维重建图像对应的目标对象;
5、根据所述目标对象,控制所述车辆。
6、本技术提供的车辆的控制方法中,首先获取车辆外部环境的点云数据;接着,基于车辆中预先搭载的图像生成模型,将点云数据中各个物体还原于三维空间以生成三维图像,即,确定点云数据对应的三维重建图像;然后,根据三维重建图像,确定与三维重建图像对应的目标对象;最后,根据目标对象控制车辆执行避障或其他行驶操作。
7、如此,本技术实施方式使得车辆外部环境的各个对象的三维模型/三维结构能在三维重建图像中呈现,故车辆外部环境中的目标对象能被准确地确定,也因此,能通过准确的目标对象执行有效的控制车辆。
8、在某些实施方式中,所述获取车辆外部环境的点云数据,包括:
9、获取不同摄像位置下对同一车辆外部方向进行拍摄得到的两张图像;
10、根据所述两张图像,确定所述点云数据。
11、如此,本技术实施方式使得点云数据能根据拍摄得到的图像而得到,从而保障了点云数据的高效获取。
12、在某些实施方式中,所述两张图像基于双目摄像头得到。
13、如此,使得图像的获取效率得以保障。
14、在某些实施方式中,所述根据所述两张图像,确定所述点云数据,包括:
15、根据标定参数对所述两张图像进行校正,得到校正后的所述两张图像,其中,所述标定参数通过对所述双目摄像头进行标定操作以得到;
16、根据校正后的所述两张图像,确定所述点云数据。
17、如此,本技术实施方式通过对两张图像的校正,使得两张图像的图像质量得以提高,进而,通过校正后图像得到的点云数据的真实性和有效性得以保障。
18、在某些实施方式中,所述根据校正后的所述两张图像,确定所述点云数据,包括:
19、确定校正后的所述两张图像对应的视差图;
20、根据所述视差图和所述双目摄像头的q矩阵,确定点云数据。
21、如此,本技术实施方式基于通过视差图和q矩阵获取点云数据的方式,使得点云数据的获取效率得以保障。
22、在某些实施方式中,所述根据所述三维重建图像,确定与所述三维重建图像对应的目标对象,包括:
23、基于预设的卷积神经网络,根据所述三维重建图像,确定所述目标对象。
24、如此,本技术实施方式通过卷积神经网络模型确定三维重建图像中的目标对象的方式,使得目标对象的有效性得以保障。
25、在某些实施方式中,所述基于预设的卷积神经网络,根据所述三维重建图像,确定所述目标对象,包括:
26、基于所述卷积神经网络中依次连接的多个特征提取模块,根据所述三维重建图像确定图像特征图;
27、基于所述卷积神经网络中的分类网络,根据所述图像特征图确定所述目标对象。
28、如此,本技术实施方式通过堆叠多个特征提取模块以确保三维重建图像中的重要特征能被捕获,进而,使得目标对象的可信度得以保障。
29、在某些实施方式中,所述多个特征提取模块包括第一特征提取单元、第二特征提取单元、第三特征提取单元、第四特征提取单元、第五特征提取单元及分类单元,所述第一特征提取单元和所述第二特征提取单元均包括一个三维卷积层和一个下采样层,所述第三特征提取单元、第四特征提取单元和第五特征提取单元均包括两个三维卷积层和一个下采样层。
30、本技术实施方式提供一种模型的训练方法,包括:
31、获取车辆外部环境的多个点云数据样本;
32、基于预设网络模型,根据所述点云数据样本确定预测三维重建图像;
33、根据所述预测三维重建图像,训练所述预设网络模型;
34、根据更新完成的所述预设网络模型得到图像生成模型。
35、如此,本技术实施方式通过训练完成的图像生成模型,使得车辆外部环境的各个对象的三维模型/三维结构能在三维重建图像中呈现,故车辆外部环境中的目标对象能被准确地确定,也因此,能通过准确的目标对象执行有效的控制车辆。
36、在某些实施方式中,所述基于预设网络模型,根据所述点云数据样本确定预测三维重建图像,包括:
37、基于所述预设网络模型的生成器模型,根据所述点云数据样本确定预测三维重建图像;
38、所述根据所述预测三维重建图像,训练所述预设网络模型,包括:
39、基于所述预设网络模型的判别器模型,确定所述预测三维重建图像的鉴别结果,其中,所述鉴别结果表示所述预测三维重建图像是否为通过所述生成器模型确定的图像;
40、根据所述预测三维重建图像的所述鉴别结果,训练所述预设网络模型。
41、如此,本技术实施方式基于生成对抗网络,使得图像生成模型输出的三维重建图像能与真实图像相似,从而能有效保障了三维重建图像的可信度。
42、在某些实施方式中,所述基于所述预设网络模型的生成器模型,根据所述点云数据样本确定预测三维重建图像,包括:
43、基于所述生成器模型,根据预设的噪声数据和所述点云数据样本,确定所述预测三维重建图像。
44、如此,本技术实施方式基于噪声数据的引入,使得预设网络模型的训练难度上升,进而能保障预设网络模型能得到充分的训练,从而能避免欠拟合现象的发生。
45、在某些实施方式中,所述生成器模型包括用于执行下采样操作的第一全卷积连接网络,所述判别器模型包括用于执行上采样操作的第二全卷积连接网络。
46、本技术实施方式提供一种车辆的控制装置,包括:
47、点云获取模块,用于获取车辆外部环境的点云数据;
48、图像确定模块,用于基于预设的图像生成模型,确定所述点云数据对应的三维重建图像;
49、识别模块,用于根据所述三维重建图像,确定与所述三维重建图像对应的目标对象;
50、控制模块,用于根据所述目标对象,控制所述车辆。
51、本技术实施方式提供一种模型的训练装置,包括:
52、样本获取模块,用于获取车辆外部环境的多个点云数据样本;
53、图像重建模块,用于基于预设网络模型,根据所述点云数据样本确定预测三维重建图像;
54、更新模块,用于根据所述预测三维重建图像,训练所述预设网络模型;
55、模型生成模块,用于根据更新完成的所述预设网络模型得到图像生成模型。
56、本技术实施方式提供一种车辆,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述的车辆的控制方法。
57、本技术实施方式提供一种服务器,包括存储器和处理器,所述存储器中存储有计算机程序,所述计算机程序被所述处理器执行时,实现上述的模型的训练方法。
58、本技术实施方式提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被一个或多个处理器执行时,实现上述的车辆的控制方法和/或模型的训练方法。
59、本技术实施方式中车辆的控制装置、模型的训练装置、车辆、服务器及计算机可读存储介质,使得车辆外部环境的各个对象的三维模型/三维结构能在三维重建图像中呈现,故车辆外部环境中的目标对象能被准确地确定,也因此,能通过准确的目标对象执行有效的控制车辆。
60、本技术的实施方式的附加方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本技术的实施方式的实践了解到。
- 还没有人留言评论。精彩留言会获得点赞!