一种自动驾驶队列跟驰系统及跟弛方法与流程
本发明涉及自动驾驶,特别是涉及一种自动驾驶队列跟驰系统及跟弛方法。
背景技术:
1、在商用车领域,完全自动驾驶技术尤其是l4、l5级别自动驾驶技术不仅能够带来车辆安全性能的极大提高,也能极大降低对司机的需求,从而极大降低总体运营成本。因此完全自动驾驶汽车的应用前景非常广阔。
2、但由于车辆行驶的环境复杂多变,目前只有l2级别的智能驾驶汽车实现产业化量产应用;l2级别以上的自动驾驶技术和社会环境(包括交通设施、法律法规等)尚不成熟,只能在特定工况和环境下能实现限制级应用,加之l2级别以上自动驾驶技术车辆也因为价格昂贵因此无法实现批量产业化应用。
3、在自动驾驶汽车领域,当多辆卡车同时行驶在同一路线时,可实施列队跟驰中第一辆车(头车)为人工驾驶或自动驾驶模式,自第二辆车及之后车辆均为自动驾驶模式,通过感知技术和网联通信技术获取并传递各车辆的地理位置信息以及运动姿态信息,实现队列车辆之间保持事先规划的较短间距以列队状态行驶,这就是列队跟驰技术。列队跟驰行驶可极大的降低运载车在行驶中的空气阻力,实现节能减排。由于运载车采用自动驾驶模式,可以不用驾驶员或只配少量的安全员,因此可以极大的降低车辆运行过程中的人力成本;同时该技术能够大大降低驾驶员的工作强度,提升驾驶安全性。
4、在当前技术和运营环境下,商用车列队跟驰技术如要规模化应用,车队中的运载车均需要能实现l3级及以上自动驾驶功能,这使得每辆跟随车的成本都很昂贵。车队头车目前都是有人驾驶车辆,其核心功能为提供整个车队的加速、减速和转向等信息。因此头车实际上不必和后面运载车的状态一致,其只需提供好加减速和转向信息给整个车队车辆即可。
5、当前在车辆列队行驶过程中,后方运载车大多是根据与前方车辆的车距来调整自身的车速,以保持好跟驰车距及车辆队列的行驶秩序。但由于此种车速的调整方式较为简单,使得车辆在实际跟驰时,后方车辆往往难以较好地保持跟驰车距,容易扰乱车辆队列的行驶秩序。当前列队跟驰技术使得运载车的能耗状态几乎一样,且每辆车都需要自带能量驱动自身。考虑到入列车辆的能量状态很大可能不一致的情况下,如果需要保持列队跟驰状态很长时间,会出现队列中某一初始能量不够的车辆不能保持队列运行的状况发生,从而影响整个队列车辆的运行效率和效益。
技术实现思路
1、本发明提出了一种自动驾驶队列跟驰系统及跟弛方法,解决了现有技术中存在的运载车难以较好地保持跟驰车距、队列中某一初始能量不够的车辆不能保持队列运行的状况发生的技术问题。
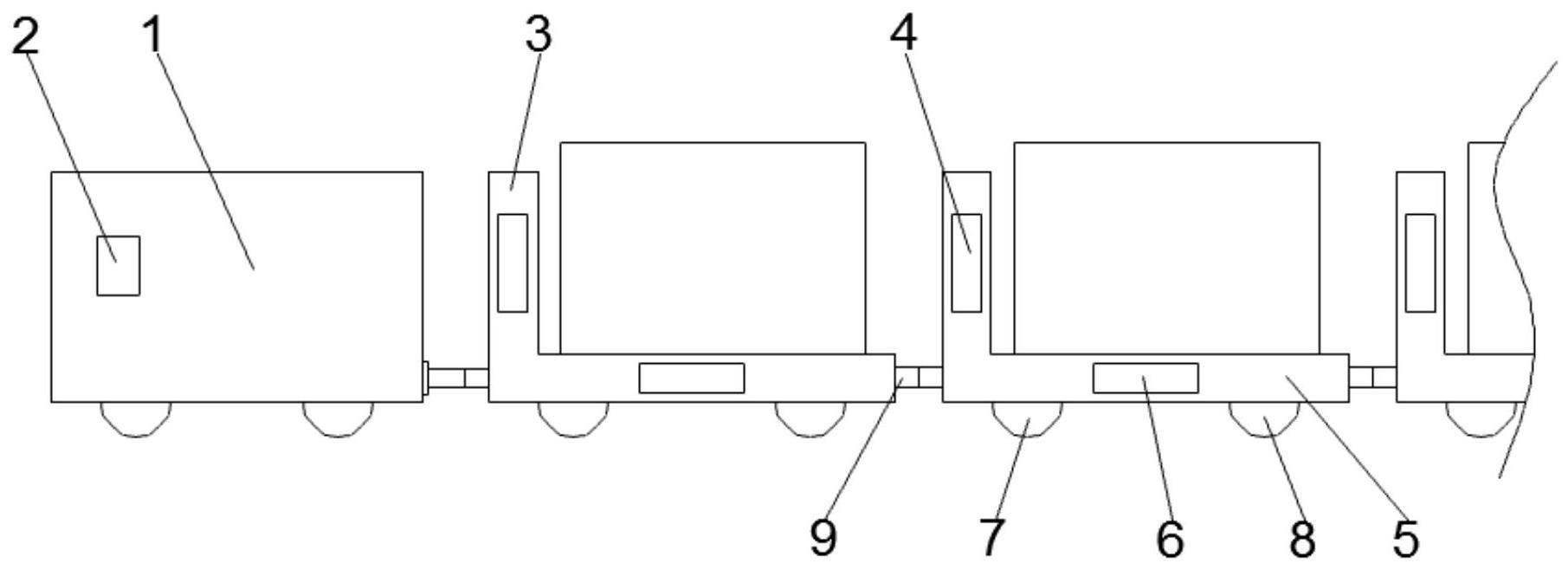
2、本发明提供一种自动驾驶队列跟驰系统,包括:
3、引导车,其尾部设有滑动组件;
4、队列控制器,用于产生并发送多个操作指令;
5、多个运载车,依次排列在所述引导车后,所述滑动组件通过连接件与相邻的运载车连接;其余的所述运载车首尾依次通过连接件连接;
6、多个自动驾驶模块,多个所述自动驾驶模块均与队列控制器无线连接,用于接收多个操作指令,并根据多个操作指令控制对应的运载车做出相应的操作;
7、多个能源系统,分别设置在多个所述运载车上,与多个自动驾驶模块电连接,用于提供动力;
8、当某一个运载车的能源系统不足以提供本运载车的动力时,队列控制器控制该运载车的能源系统关闭,控制其余的运载车带动该运载车前进。
9、优选的,所述队列控制器内部设有传输模块,多个操作指令通过传输模块发送至多个自动驾驶模块。
10、优选的,多个所述操作指令包括加速、减速、转向、制动、变道、脱离和合并。
11、优选的,所述连接件为詹式车钩。
12、优选的,所述滑动组件包括:
13、底座,固定设置在所述引导车尾部;
14、套筒,垂直固定设置在所述底座端部;
15、弹簧,设置在所述套筒内部,其一端与套筒内端固定连接,另一端与詹式车钩连接。
16、优选的,所述运载车包括:
17、平台,用于装载货物;
18、转向轮,用于驱动运载车进行转向;
19、驱动轮,用于驱动运载车进行行驶;
20、所述转向轮和驱动轮与能源系统电连接。
21、优选的,所述运载车具有l3级别的自动驾驶功能。
22、一种自动驾驶队列跟驰系统的跟弛方法,包括以下步骤:
23、队列控制器根据引导车行驶的路面情况产生多个操作指令,并将多个操作指令发送至多个自动驾驶模块;
24、多个自动驾驶模块接收多个操作指令,根据多个操作指令控制对应的运载车的转向轮和驱动轮做出相应的操作,对多个运载车和引导车的相对位置进行保持;
25、当一个或者多个运载车的能源系统不足以驱动自身驱动转向轮和驱动轮时,队列控制器控制该能源系统关闭,由其余运载车驱动行驶。
26、优选的,所述多个所述操作指令包括加速、减速、转向、制动、变道、脱离和合并。
27、与现有技术相比,本发明的有益效果是:
28、本发明提供了一种自动驾驶队列跟驰系统,通过引导车上的队列控制器对多个自动驾驶模块进行控制,可以使得列队行驶的运载车数量大大增加。引导车和运载车首尾依次连接,当某一个运载车的能源系统不足以提供本运载车的动力时,队列控制器控制该运载车的能源系统关闭,控制其余的运载车带动该运载车前进,使得队列中部分运载车不提供驱动力转而由其它运载车提供整个车队的驱动力,使得驱动系统效率进一步提高。
技术特征:
1.一种自动驾驶队列跟驰系统,其特征在于,包括:
2.如权利要求1所述的一种自动驾驶队列跟驰系统,其特征在于,所述队列控制器(2)内部设有无线传输模块,多个操作指令通过传输模块发送至多个自动驾驶模块(4)。
3.如权利要求2所述的一种自动驾驶队列跟驰系统,其特征在于,多个所述操作指令包括加速、减速、转向、制动、变道、脱离和合并。
4.如权利要求3所述的一种自动驾驶队列跟驰系统,其特征在于,所述连接件为詹式车钩(9)。
5.如权利要求4所述的一种自动驾驶队列跟驰系统,其特征在于,所述滑动组件包括:
6.如权利要求5所述的一种自动驾驶队列跟驰系统,其特征在于,所述运载车(3)包括:
7.如权利要求1所述的一种自动驾驶队列跟驰系统,其特征在于,所述运载车(3)具有l3级别的自动驾驶功能。
8.一种根据权利要求6的自动驾驶队列跟驰系统的跟弛方法,其特征在于,包括以下步骤:
9.如权利要求8所述的一种自动驾驶队列跟驰系统方法,其特征在于,所述多个所述操作指令包括加速、减速、转向、制动、变道、脱离和合并。
技术总结
本发明公开了一种自动驾驶队列跟驰系统及跟弛方法,涉及自动驾驶技术领域,该跟驰系统包括:引导车,其尾部设有滑动组件;队列控制器,用于产生并发送多个操作指令;多个运载车,运载车首尾依次通过连接件连接;多个自动驾驶模块,多个自动驾驶模块均与队列控制器无线连接,用于接收多个操作指令,并根据多个操作指令控制对应的运载车做出相应的操作;多个能源系统,分别设置在多个运载车上,用于提供动力;当某一个运载车的能源系统不足以提供本运载车的动力时,队列控制器控制该运载车的能源系统关闭,控制其余的运载车带动该运载车前进。本发明队列中部分运载车不能提供驱动力时,由其它运载车提供整个车队的驱动力,使得驱动系统效率提高。
技术研发人员:李敏,李家
受保护的技术使用者:湖北天骏弘新能源科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!