用于管理跟随飞行器相对于领航飞行器的纵向位置的方法与流程
本发明涉及编队飞行的领域,并且更具体地涉及管理跟随飞行器相对于领航飞行器的纵向位置的领域。
背景技术:
0、现有技术
1、众所周知,飞行器编队飞行是为了节能。
2、因此,作为示例,在本技术人进行的演示中,两个飞行器以编队飞行从东卢兹飞到蒙特利尔。在该编队中,两个飞行器彼此跟随,领航飞行器引导该编队,并且跟随飞行器跟随领航飞行器,同时将其自身定位在领航飞行器的向上尾流中。已经证明,与单个飞行器的相同飞行相比,这种编队飞行使得有可能节省多于六吨的二氧化碳排放,并且可以节省用于跟随飞行器的多于5%的燃料。编队飞行涉及能够持续管理跟随飞行器相对于领航飞行器的纵向位置。如已知的,使用具有纵向位置和速度反馈的速度设定点计算来管理跟随飞行器的纵向位置。该计算表达如下:速度设定点等于领航飞行器的速度加上由第一增益系数加权的领航飞行器与跟随飞行器之间的距离、加上由第二增益系数加权的领航飞行器与跟随飞行器之间的速度差。
3、由于用于计算领航飞行器与跟随飞行器之间的距离的项的演变以及用于计算速度差的项的演变,该计算必然导致速度设定点的变化。
4、该设定点变化然后被传送在推力控制链内并且导致该跟随飞行器的发动机推力设定点的变化,特别是在巡航模式下。因此,这种类型的变化可降低乘客舒适性,并且因此期望避免这种变化。
5、在此背景下,希望提供一种用于管理在编队飞行中跟随领航飞行器的跟随飞行器的纵向位置的方法,该方法使得有可能降低速度设定点波动,从而改善乘客舒适性。
技术实现思路
1、为此,提出一种用于管理在编队飞行中跟随领航飞行器的至少一个跟随飞行器的纵向位置的方法,该方法的特征在于其包括至少以下步骤:
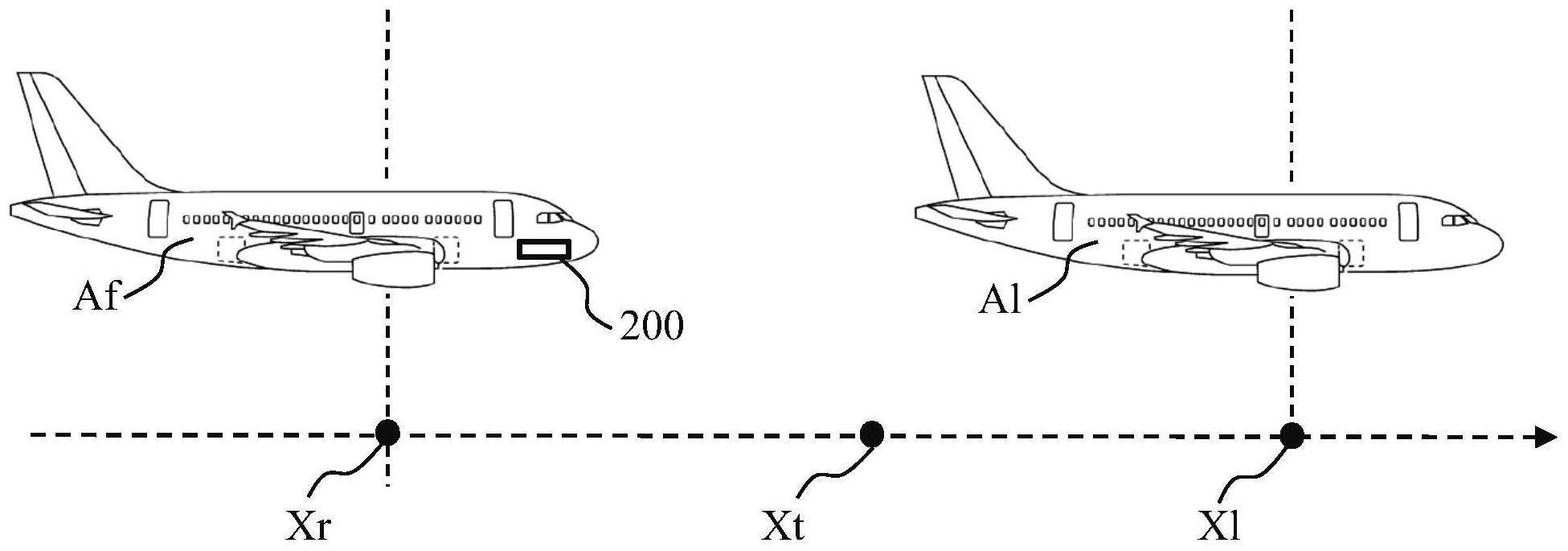
2、(a)获得领航飞行器的位置、跟随飞行器的实际纵向位置xr、领航飞行器的速度sl和跟随飞行器的速度sf;
3、(b)确定跟随飞行器相对于领航飞行器的纵向位置的目标纵向位置xt;
4、(c)计算跟随飞行器相对于领航飞行器的目标纵向位置xt与所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr之间的差值xt-xr;
5、(d)将该差值xt-xr与至少一个预定义阈值进行比较;
6、(e)基于该比较来从至少两个分开的控制律scf中选择用于控制跟随飞行器的速度sf的控制律scf;
7、(f)应用所选择的控制律scf,以便管理跟随飞行器相对于领航飞行器的位置的实际纵向位置xr。
8、因此,通过定义至少一个阈值并且通过基于与所述至少一个阈值的比较从至少两个分开的控制律中选择用于控制跟随飞行器的速度的控制律,跟随飞行器的速度是被增量式地管理,从而避免寄生加速或减速,从而允许针对跟随飞行器的乘客的更舒适的驾驶。换言之,所提出的方法使得有可能管理在编队飞行中跟随领航飞行器的跟随飞行器的纵向位置并且使得有可能降低速度设定点波动,以便由此改善乘客舒适性。
9、根据一个特定规定,控制律scf被如下选择:
10、-如果所获得的跟随飞行器相对于该领航飞行器的实际纵向位置xr与所获得的跟随飞行器相对于领航飞行器的目标纵向位置xt之间的差值xt-xr是在第一预定义阈值th1与第二预定义阈值th2之间的值区间内,其中th1+xt<xt<th2+xt,其中th1为负并且th2为正,则所选择的控制律scf由以下定义:scf=sl;
11、-如果所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr与该跟随飞行器相对于领航飞行器的目标纵向位置xt之间的差值xt-xr在第一预定义阈值th1与第三预定义阈值th3之间的值区间内,其中th3+xt<th1+xt<xt,其中th3为负,则所选择的控制律scf由以下定义:scf=sl+of,至少直到所获得的跟随飞行器的实际纵向位置xr大于第四预定义阈值th4,其中th1≤th4≤xt,其中th4为负;
12、-如果所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr与该跟随飞行器相对于领航飞行器的目标纵向位置xt之间的差值xt-xr小于第三预定义阈值th3,则所选择的控制律scf由以下定义:scf=sl+k1·(xr-xt)+k2·(sl-sf)直到所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr大于第四预定义阈值th4;
13、-如果所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr与该跟随飞行器相对于领航飞行器的目标纵向位置xt之间的差值xt-xr在第二预定义阈值th2与第六预定义阈值th6之间的值区间内,其中xt<th2+xt<th6+xt,其中th6为正,则所选择的控制律由以下定义:scf=sl+ob,至少直到所获得的跟随飞行器的实际纵向位置xr大于第五预定义阈值th5,其中th2≥th5≥xt,其中th5为正;
14、-如果所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr与该跟随飞行器相对于领航飞行器的目标纵向位置xt之间的差值xt-xr大于第六预定义阈值th6,则所选择的控制律由以下定义:scf=sl+k1·(xr-xt)+k2·(sl-sf)直到所获得的跟随飞行器相对于领航飞行器的实际纵向位置xr小于第五预定义阈值th5;
15、其中of是预定正常数,k1是第一预定义增益系数,k2是第二预定义增益系数,并且ob是预定负常数。
16、根据一种特定配置,第一阈值th1、第二阈值th2、第四阈值th4和第五阈值th5由以下不等式定义:th1<th4<xt<th5<th2。
17、根据一种特定规定,如果|scf-pscf|<ls,其中scf是用于跟随飞行器(af)的速度命令,pscf是用于跟随飞行器的前一速度命令,并且ls是预定义速度阈值,则控制律保持不变。
18、根据一种特定规定,卡尔曼滤波器被应用于获得的领航飞行器的速度sl和跟随飞行器的速度sf之间的差值,以便估计获得的领航飞行器的速度的相对偏差。
19、根据一种特定规定,通过组合领航飞行器的马赫数的测量的低频率与领航飞行器的地面速度的高频率来确定领航飞行器的速度。
20、根据另一方面,提出了一种包括程序代码指令的计算机程序产品,当所述指令被处理器执行时,用于执行该管理方法。
21、根据另一方面,提出了一种非暂态存储介质,其上存储有包括程序代码指令的计算机程序,当从所述非暂态存储介质中读取所述指令并且由处理器执行时用于执行该管理方法。
22、根据另一方面,提出了一种包括电子电路系统的计算系统,该电子电路系统被配置成实现对在编队飞行中跟随领航飞行器的至少一个跟随飞行器的纵向位置的管理,该电子电路系统实现至少以下步骤:
23、(a)获得领航飞行器的位置、跟随飞行器相对于领航飞行器的实际纵向位置xr、领航飞行器的速度sl和跟随飞行器的速度sf;
24、(b)确定跟随飞行器的相对于领航飞行器的纵向位置的目标纵向位置xt;
25、(c)计算跟随飞行器相对于领航飞行器的目标纵向位置xt与获得的跟随飞行器相对于领航飞行器的实际纵向位置xr之间的差值xt-xr;
26、(d)将该差值xt-xr与至少一个预定义阈值进行比较;
27、(e)基于该比较来从至少两个分开的控制律中选择用于控制跟随飞行器的速度的控制律;
28、(f)应用所选择的控制律,以便管理跟随飞行器相对于领航飞行器的位置的实际纵向位置xr。
29、根据另一方面,提出了一种包括该计算系统的飞行器。
- 还没有人留言评论。精彩留言会获得点赞!