一种基于物联网技术的智能农机调度方法与流程
本发明涉及农机调度,更具体地说,它涉及一种基于物联网技术的智能农机调度方法。
背景技术:
1、智能农机调度如今越来越追求高效率、高利用率以及低成本。该领域研究可以分为系统结构和算法优化。现阶段,大部分研究针对的是优化调度算法,从而达到调度需求。
2、在种植农田发生火灾时,为了防止火灾造成严重的经济损失,因此需要对种植农田内部的农作物进行灭火处理,在农作物火势较大难以扑灭的情况下,需要通过农用收割机对燃烧农作物附近的未燃烧农作物进行收割处理,从而通过切断燃料达到阻止火势蔓延的目的,进而对农作物进行灭火。
3、然而现有基于物联网技术的智能农机调度方法不能确定农机在种植农田内部预期行驶角度,因此容易造成农机太靠近农作物燃烧区域,由于农作燃烧区域温度较高,因此可能造成农机和工作人员的安全事故。
技术实现思路
1、针对现有技术存在的不足,本发明的目的在于提供一种基于物联网技术的智能农机调度方法。
2、为实现上述目的,本发明提供了如下技术方案:
3、一种基于物联网技术的智能农机调度方法,该方法包括以下步骤:
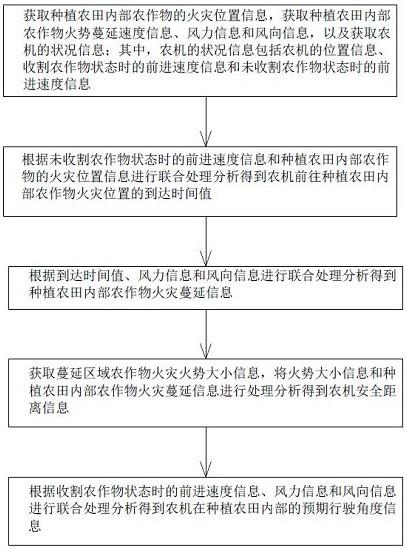
4、获取种植农田内部农作物的火灾位置信息,获取种植农田内部农作物火势蔓延速度信息、风力信息和风向信息,以及获取农机的状况信息;其中,农机的状况信息包括农机的位置信息、收割农作物状态时的前进速度信息和未收割农作物状态时的前进速度信息;
5、根据未收割农作物状态时的前进速度信息和种植农田内部农作物的火灾位置信息进行联合处理分析得到农机前往种植农田内部农作物火灾位置的到达时间值;
6、根据到达时间值、风力信息和风向信息进行联合处理分析得到种植农田内部农作物火灾蔓延信息;
7、获取蔓延区域农作物火灾火势大小信息,将火势大小信息和种植农田内部农作物火灾蔓延信息进行处理分析得到农机安全距离信息;
8、根据收割农作物状态时的前进速度信息、风力信息和风向信息进行联合处理分析得到农机在种植农田内部的预期行驶角度信息。
9、基于物联网技术的智能农机调度方法通过获取种植农田火灾位置信息,在种植农田发生火灾时,使农机行驶至种植农田的内部,这里的农机可以为收割机,并且收割机在种植农田内部进行收割处理,从而通过切断燃料达到阻止火势蔓延的目的,进而达到对农作物进行灭火的目的,并且根据收割农作物状态时的前进速度信息、风力信息和风向信息进行联合处理分析得到农机在种植农田内部的预期行驶角度信息。
10、优选地,将收割农作物状态时的前进速度信息和未收割农作物状态时的前进速度信息进行取值和标记,得到第一速度值ysd和第二速度值esd。
11、需要注意的是,农机在处于收割农作物状态时的前进速度与未收割农作物状态的前进速度不一样,因此需要分别将收割农作物状态时的前进速度信息和未收割农作物状态时的前进速度信息进行取值和标记,得到第一速度值ysd和第二速度值esd。
12、优选地,根据风向信息将种植农田内部农作物划分为迎风农作物、背风农作物和侧风农作物;
13、根据风力信息获取迎风农作物燃烧的速度信息,根据风力信息获取背风农作物燃烧的速度信息,根据风力信息获取侧风农作物燃烧的速度信息;
14、将迎风农作物燃烧的速度信息、背风农作物燃烧的速度信息和侧风农作物燃烧的速度信息进行取值和标记,得到第一燃烧速度值dyr、第二燃烧速度值der和第三燃烧速度值dsr。
15、需要注意的是,在种植农田发生火灾时,根据风向信息将种植农田内部农作物划分为迎风农作物、背风农作物和侧风农作物,并且迎风农作物、背风农作物和侧风农作物的燃烧速度不一样,迎风农作物的燃烧速度明显快于背风农作物的燃烧速度。
16、由于种植农田安装有摄像头,通过摄像头拍摄农作物的燃烧信息从而得到迎风农作物燃烧的速度信息、背风农作物燃烧的速度信息和侧风农作物燃烧的速度信息。
17、优选地,根据农机的位置信息和迎风农作物的位置信息计算得到农机行驶距离信息,将农机行驶距离信息进行取值和标记得到农机行驶路线距离值nxs;
18、通过时间函数计算得到到达时间值sjz。
19、需要注意的时,由于迎风农作物的燃烧速度更快,因此需要农机达到迎风农作物区域,通过收割机对迎风农作物进行收割,从而切断切断燃料达到阻止迎风农作物火势蔓延的目的。
20、由于农机在行驶至迎风农作物区域的过程中,农作物的火势继续在迎风农作物区域蔓延,因此根据时间函数计算得到到达时间值sjz;其中,dyr为迎风农作物燃烧的第一燃烧速度值、esd为农机在未收割农作物状态时前进速度的第二速度值、nxs为将农机行驶距离信息进行取值和标记得到农机行驶路线距离值。
21、优选地,通过第一蔓延公式计算得到迎风农作物燃烧距离值ymy;
22、通过第二蔓延公式计算得到背风农作物燃烧距离值emy;
23、通过第三蔓延公式计算得到侧风农作物燃烧距离值smy;
24、其中,所述迎风农作物燃烧距离值ymy、背风农作物燃烧距离值emy和侧风农作物燃烧距离值smy构成种植农田内部农作物火灾蔓延信息。
25、由于农机在到达发生火灾的种植农田过程中需要花费时间,在这个过程中,火灾在种植农田内部的农作物继续蔓延,因此通过第一蔓延公式计算得到迎风农作物燃烧距离值ymy;通过第二蔓延公式计算得到背风农作物燃烧距离值emy;通过第三蔓延公式计算得到侧风农作物燃烧距离值smy,从而确定在农机行驶至种植农田过程中迎风农作物、背风农作物和侧风农作物燃烧的距离信息。
26、优选地,通过第一安全公式计算得到迎风安全距离值yay;
27、通过第二安全公式计算得到背风安全距离值eay;
28、通过第三安全公式计算得到侧风安全距离值say;
29、其中,ysa表示蔓延区域农作物火灾火势大小影响的距离值;迎风安全距离值yay、背风安全距离值eay和侧风安全距离值say构成农机安全距离信息。
30、需要注意的是,由于收割机在对种植农田内部的种植物进行收割时,收割机不能贴近农作物燃烧区域进行收割,因此农作物燃烧区域的温度较高,从而影响农机和工作人员的安全性,存在风险,因此需要农机在间隔农作物燃烧区域一定距离进行行驶。
31、通过第一安全公式计算得到迎风安全距离值yay;通过第二安全公式计算得到背风安全距离值eay;通过第三安全公式计算得到侧风安全距离值say,从而使迎风区域内部的农机在迎风安全距离值yay范围内行驶,使背风区域内部的农机在背风安全距离值eay范围内行驶,使侧风区域内部的农机在侧风安全距离值say范围内行驶,保障农机和工作人员的安全。
32、优选地,通过第一角度公式计算得到农机在迎风农作物区域行驶的角度值yfj;
33、通过第二角度公式计算得到农机在背风农作物区域行驶的角度值bfj;
34、通过第三角度公式计算得到农机在侧风农作物区域行驶的角度值sfj;
35、其中,农机在迎风农作物区域行驶的角度值yfj、农机在背风农作物区域行驶的角度值bfj和农机在侧风农作物区域行驶的角度值sfj构成农机在种植农田内部的预期行驶角度信息。
36、需要注意的是,收割机在迎风农作物区域内部行驶对迎风农作物进行收割时,由于迎风农作物的边缘较长,在收割机对迎风农作物进行收割时,迎风农作物未收割部分的农作物依然在燃烧,因此收割机不能直线在迎风农作物安全区域行驶,需要使收割机按照角度值yfj在迎风农作物区域行驶,这样才能保障收割机和工作人员的安全。
37、收割机在背风农作物区域内部行驶对背风农作物进行收割时,由于背风农作物的边缘较长,在收割机对背风农作物进行收割时,背风农作物未收割部分的农作物依然在燃烧,因此收割机不能直线在背风农作物安全区域行驶,需要使收割机按照角度值bfj在背风农作物区域行驶,这样才能保障收割机和工作人员的安全。
38、收割机在侧风农作物区域内部行驶对侧风农作物进行收割时,由于侧风农作物的边缘较长,在收割机对侧风农作物进行收割时,侧风农作物未收割部分的农作物依然在燃烧,因此收割机不能直线在侧风农作物安全区域行驶,需要使收割机按照角度值sfj在侧风农作物区域行驶,这样才能保障收割机和工作人员的安全。
39、与现有技术相比,本发明具备以下有益效果:
40、本发明中,通过获取种植农田火灾位置信息,在种植农田发生火灾时,使农机行驶至种植农田的内部,这里的农机可以为收割机,并且收割机在种植农田内部进行收割处理,从而通过切断燃料达到阻止火势蔓延的目的,进而达到对农作物进行灭火的目的,并且根据收割农作物状态时的前进速度信息、风力信息和风向信息进行联合处理分析得到农机在种植农田内部的预期行驶角度信息,从而保障农机和工作人员的安全,防止农机和工作人员太靠近农作物燃烧区域存在安全隐患。
- 还没有人留言评论。精彩留言会获得点赞!