用于道路持续监测并处理突发事件的双任务巡检方法
本发明涉及群体机器人协同巡检领域,特别是涉及一种用于道路持续监测并处理突发事件的双任务巡检方法。
背景技术:
1、群体机器人协同巡检指一群机器人在道路或空旷区域中巡逻以获取态势信息并确保环境安全。其被广泛应用于防疫、区域守卫、灾害管理和环境监测。现有的群体机器人协同巡检方法分为持续巡检和对抗巡检两类。
2、持续巡检要求机器人尽可能频繁地访问环境中的重要节点,并被应用于人群运动监视、农业管理和数据采集。持续巡检的目的是通过减少机器人访问每个节点的时间间隔来监测还未消失的事件。因此,这类巡检主要的评估标准是时间和移动成本。已有的持续巡检方法有一个共同的特点:机器人使用确定性策略对视点进行持续的循环访问。它们认为环境状况会随着时间的推移而有规律地变化。因此,它们在一个稳定的环境下工作,不考虑突发事件。
3、对抗性巡检重点关注如何防止入侵者入侵、污染和破坏环境,并被广泛应用于疆土守卫和边界防御问题。在这些强对抗场景中,入侵者可以通过分析防守机器人的策略来决定攻击的时间和地点。因此,对抗巡检方法采用非确定性和不可预测的策略,避免决策被入侵者预测。然而,现有的持续和对抗巡检方法不适用于同时执行道路持续监测并处理突发事件的双任务场景,但这种双任务需求在如森林火灾的现实场景中非常常见。因此,需要一种适用于道路持续监测并处理突发事件的双任务巡检方法。
技术实现思路
1、本发明提供了一种用于道路持续监测并处理突发事件的双任务巡检方法,并应用到森林火灾问题中,使得群体机器人具有协同监测环境状态并快速处理火灾的能力。本发明提供的这种双任务巡检方法有效地发挥了群体机器人实际应对变化态势的应用潜能,能够迅速有效地监测环境并协同处理突发事件。
2、为实现上述目的,本发明提供了如下技术方案:
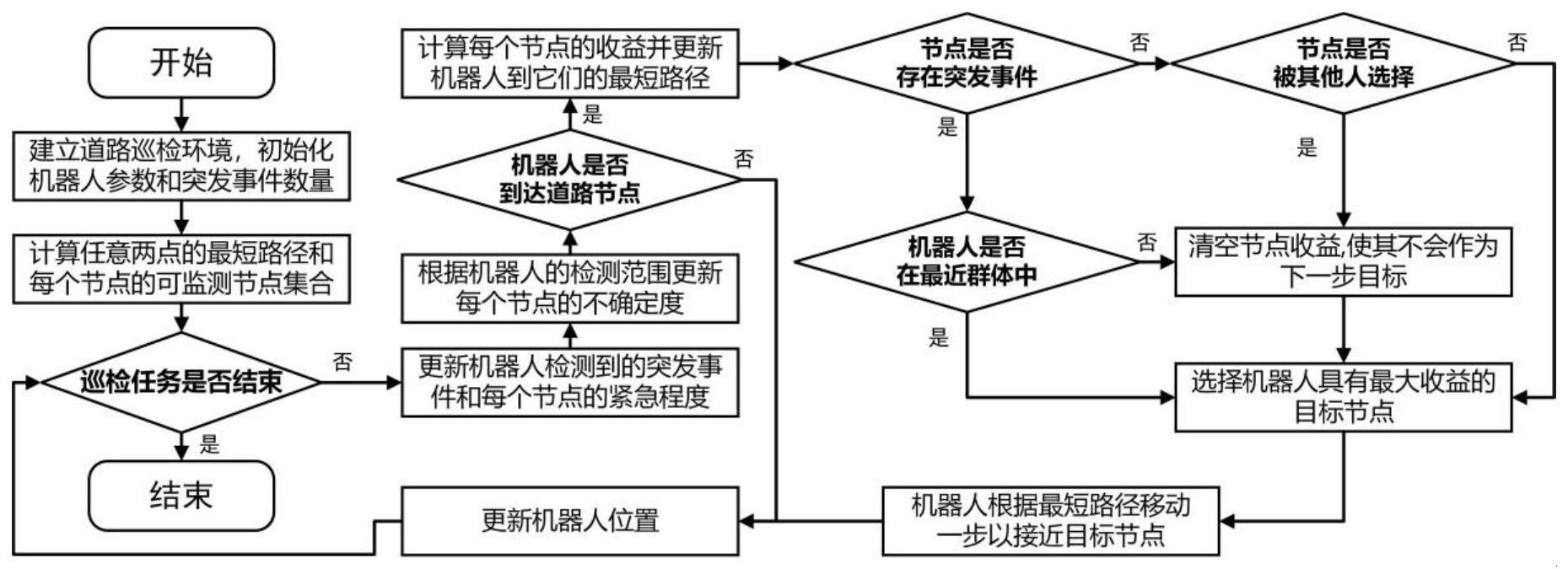
3、一种用于道路持续监测并处理突发事件的双任务巡检方法,概括为:初始化群体机器人的位置;计算任意两节点的最短路径,计算并存储每个点监测范围内的可观察节点;在每个时刻更新环境节点的监测状态以及群体机器人监测到的突发事件;当一个机器人到达环境节点时,进行下一步移动目标决策,遍历所有节点作为候选节点;计算候选节点的收益并更新机器人到它们的最短路径;如果当前机器人不在最接近突发事件的机器人群体中,清空其收益,使其不会选择突发事件作为下一步目标;选择机器人具有最大收益的目标节点,机器人根据最短路径移动一步以接近其目标节点。重复上述决策和移动过程,直到达到最大运行时间结束。
4、一种用于道路持续监测并处理突发事件的双任务巡检方法,其特征在于,具体的实现步骤为:
5、建立巡检道路网络环境g,设置出现的突发事件数量h,初始化算法参数:群体机器人个数r,机器人速度v,机器人监测能力fi,机器人监测范围dc,最大运行时间t。
6、步骤1.1:随机初始群体机器人的位置pi,i∈{1,2,...,r}。
7、步骤1.2:初始化每个机器人存储的其他机器人的目标点q={q1,q2,...,qn}。
8、步骤1.3:使用弗洛伊德(floyd)算法计算任意两点的最短路径,公式如下:
9、d(i,j)=min(d(i,j),d(i,k)+d(j,k))
10、其中,i,j代表最短路径的两端节点,k代表路径中可能的中间节点,通过迭代计算,即可得到任意两点包含多段路径的最短路径。
11、步骤1.4:计算每个节点i在监测范围dc范围内的可监测节点集合oi。
12、步骤1.5:每一时间步dt更新机器人监测到的突发事件,并更新每个节点i的紧急程度公式如下:
13、
14、其中hi是节点i发生的突发事件数量。si和分别表示节点i发生的不可分离/可分离的突发事件是否得到处理,公式如下:
15、
16、
17、其中[]是艾弗森括号,当其中的条件为真是取值为l,为假取值为0。ir表示一个机器人是否有装备来处理突发事件。r′为到达节点i的机器人集合。对于可分离的突发事件,机器人到达节点处理完一个突发事件离开即可,针对垃圾处理场景。当机器人检测到丢弃的垃圾时,它会把垃圾箱尽可能地装满,然后不等其他机器人出现就离开。而不可分离的突发事件针对森林火灾场景,需要多个机器人相遇才能处理火源,因为火源如果不被一次性扑灭,会随着时间恢复。
18、步骤1.6:每一时间步dt更新每个节点i的不确定度ui(t),公式如下:
19、
20、其中是机器人r对节点i的监测概率,fi是所有机器人对节点i的监测概率,公式如下:
21、
22、
23、其中di是机器人离节点i的距离。dc是机器人的可完全监测范围。dl是机器人的探测极限。在dc内的节点可以以概率1完全监测,在dc与dl内的节点可以以0~1概率部分监测。
24、wi是节点i的重要程度。tn是一个将不确定性归一化为无量纲变量的参数。δti是节点i的监测时间间隔,即当前时刻t和上次被完全监测时间ti的间隔,公式如下:
25、δti=t-ti
26、步骤1.7:当机器人到达一个节点时,进行下一步移动目标决策,遍历所有节点作为候选节点,计算候选节点的双任务收益并更新机器人到它们的最短路径,双任务收益公式如下:
27、
28、其中是机器人r选择节点i的双任务收益。是节点i周围可观测节点的不确定度。α是双任务优先级,确保突发事件被监测到时能够优先被机器人处理。ir是机器人r是否有能力处理突发事件。是节点i的紧急程度。pc是路径消耗的权重系数。dmin是最短路径距离。v是机器人速度。wi是节点i的重要程度。
29、步骤1.8:如果目标节点不存在突发事件且被其他机器人选择,则对当前机器人的收益清空。如果目标节点存在突发事件且当前机器人不在最接近突发事件的机器人群体中,清空其收益,使其不会选择突发事件作为下一步目标。
30、步骤1.9:选择机器人具有最大收益的目标节点,机器人根据最短路径移动一步以接近其目标节点。
31、所述步骤1.7的具体过程如下:
32、步骤1.7.1:计算双任务优先级参数α,确保机器人优先处理突发事件,公式如下:
33、α=max(|oi|)+1
34、其中oi是节点i的可监测节点集合,由步骤1.4获得。
35、步骤1.7.2:更新机器人到候选目标节点的最短路径。当目标节点发生突发事件时,最短路径的目的地就是目标节点。当没有突发事件时,目的地是目标节点可监测节点集合内的节点之一,因为机器人只需要到达这样的一个节点就可以监测目标节点。任意两个节点之间的最短路径是使用步骤1.3中经过floyd算法计算得到的结果。
36、步骤1.7.3:自适应调整路径消耗的权重系数pc,公式如下:
37、
38、其中,pm和pn分别是最小、普通权重系数,umax是不确定度允许的最大值。当环境中的平均不确定度大于umax或者机器人监测到突发事件时,pc从pn下降到pm,路径损耗的重要程度降低。
39、基于以上步骤1.7.1-1.7.3遍历所有候选节点并计算机器人r选择节点i的双任务收益
40、所述步骤1.8的具体过程如下:
41、步骤1.8.1:如果目标节点不存在突发事件且被其他机器人选择,则当前机器人选择该节点的收益为0。
42、步骤1.8.2:获得其他机器人的目标节点q,计算当前机器人目标视点与q中节点相同的次数k,并将q中记录添加到等待列表中,该列表存储具有相同目标的机器人索引及其收益。
43、步骤1.8.3:如果k=hi,当前选择的节点已经分配了足够的机器人来处理它。因此当前机器人需要与q中拥有最低收益的机器人竞争。如果竞争成功,则将原来q中的机器人移除。如果竞争失败,当前机器人选择该节点的收益为0。当所有机器人决策过一遍后,离突发事件最近的机器人群体会自主选择目标节点去处理突发事件。
44、基于以上步骤1.8.1-1.8.3,如果当前机器人不在最接近突发事件的机器人群体中,其不会选择突发事件作为下一步目标。
45、本发明提出的双任务巡检方法能够使机器人群体高效协同监测并快速处理火灾等突发事件。
- 还没有人留言评论。精彩留言会获得点赞!