一种AGV调度控制方法与流程
本发明涉及智能仓储领料配送领域,具体涉及一种agv调度控制方法。
背景技术:
1、伴随这各种大中型企业开始建立自动化仓库以来,传统方式的立库,平库空间出库,逐渐被淘汰,需要很多工作人员手动开叉车去取货,再人工送到目标点位;供应商送货,工作人员收货后,人工摆放货位,后续使用时,无法第一时间查找到货物;单独agv系统,只负责搬运,无法对接各种其他硬件系统,如提升机,输送线,拆盘机等,利用率差,人员下发agv任务也无法事实跟踪和观察;但这样的方式对于大型的仓库而言,不仅在管理上不方便,在使用上效率还低。
技术实现思路
1、本发明的目的是为了解决现有技术中存在的缺点,而提出的一种agv调度控制方法。
2、为实现上述目的,本发明采用了如下技术方案:一种agv调度控制方法,所述方法具体步骤如下:
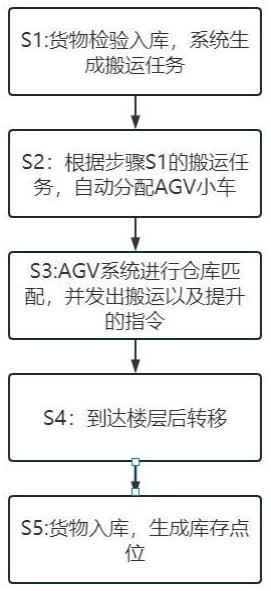
3、s1:货物检验入库,系统生成搬运任务:
4、在供应商送货后,现场作业人员对货物进行收料,检验,入库;同时系统监听入库后,自动生成agv小车的货物搬运任务;
5、所述搬运任务上标有任务的起点、货物的类型、大小以及重量;
6、s2:根据步骤s1的搬运任务,自动分配agv小车;
7、当步骤s1中,货物搬运任务生成后,呼叫agv小车进行搬运;
8、所述系统会根据搬运任务自动分配到合适的agv小车进行搬运;
9、s3:agv系统进行仓库匹配,并发出搬运以及提升的指令;
10、agv小车搬运到货物后,根据任务起点,获取对应的提升机入口,agv小车搬运到提升机入库口;
11、提升机接受到入库指令后,agv系统会根据货物,进行仓库匹配;匹配仓库成功后,获取仓库所在楼层;
12、提升机会根据agv系统分配的仓库楼层,进行提升机任务搬运;
13、s4:到达楼层后转移;
14、当提升机搬运到agv系统分配的仓库楼层后,进行agv小车呼叫,分配的仓库楼层内空闲的agv小车会接受命令进行agv小车搬运;
15、s5:货物入库,生成库存点位;
16、分配的仓库楼层内空闲的agv小车将货物搬运到指定仓库位置后,agv任务结束,同时让实际搬运终点反馈给wms,wms更新库存点位。
17、较佳的,所述步骤s5在入库后,还可以通过agv调度进行货物的出库,具体步骤如下:
18、d1:wms系统立库出库;
19、wms接受到出库指令后,按照出库指令上的物料进行库存分拣,分拣完成后,如果指令仓库为立库,则进行立库堆垛机搬运任务下发,如果指令仓库为平库,则进行分拣汇总;
20、d2:agv系统下发任务指令;
21、立库堆垛机搬运任务结束后,agv系统根据任务类型,获取不同指令类型所对应的不同任务点位(指令类型:成品出库,第三方检验等),进行agv小车任务搬运任务生成。
22、平库分拣汇总后,按照指令出库业务类型(指令类型:拆盘机呼叫空托盘,拣货区库存拣货,mes产线叫料),进行agv小车任务搬运任务生成;
23、d3:agv小车搬运;
24、agv小车接受到任务后,通过agv调度程序进行agv任务下发,呼叫agv进行搬运;
25、d4:任务反馈;
26、agv小车将货物搬运到指定目标后,反馈wms,同时agv调度程序结束agv搬运任务;
27、d5:库存更新;
28、wms接受到agv调度程序的反馈后,根据点位类型,进行业务处理,如成品出库生成发货单,第三方检验通知单等,最后更新wms库存信息及点位信息。
29、较佳的,所述入库任务以及所述出库任务可以同时进行。
30、与现有技术相比,本发明的有益效果为:通过本发明所述的一种agv调度控制方法,在实际的使用上减了少企业用人的成本,提高客户入库,出库,成产生产的效率;同时,方便wms系统对库存的管理,agv小车每次搬运完成后,会实时的把搬运位置反馈给wms,wms进行库存及库位变更;agv调度程序作为一个业务清晰化,程序轻量化的控制系统,方便与其他系统(wms,wcs等)的集成。
技术特征:
1.一种agv调度控制方法,其特征在于:所述方法具体步骤如下:
2.如权利要求1所述的一种agv调度控制方法,其特征在于:所述步骤s5在入库后,还可以通过agv调度进行货物的出库,具体步骤如下:
3.如权利要求2所述的一种agv调度控制方法,其特征在于:所述入库任务以及所述出库任务可以同时进行。
4.如权利要求2所述的一种agv调度控制方法,其特征在于:所述agv小车以及所述立库堆垛机均设有多组。
5.如权利要求2所述的一种agv调度控制方法,其特征在于:所述分拣完成后,如果指令仓库为立库,则进行立库堆垛机搬运任务下发;如果指令仓库为平库,则进行分拣汇总。
技术总结
本发明提供一种AGV调度控制方法,具体涉及WMS和RCS之间通过面向对象的形式设计的一种管理和调度控制程序。一方面,它与WMS系统进行信息交互,接受WMS系统的指令,并将其发送给AGV系统,从而驱动AGV进行搬运。另一方面,它将AGV小车的运行和搬运货物信息实时反映在界面上,并提供对AGV系统调试接口。
技术研发人员:杨松贵,马帅
受保护的技术使用者:南京维拓科技股份有限公司
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!