一种柔性土木结构振动的可移动主动控制方法
本发明涉及土木结构的主动振动控制领域,特别涉及一种柔性土木结构振动的可移动主动控制方法。
背景技术:
1、土木工程领域存在大量的轻质细长结构,如斜拉索、大跨度人行桥等,这类柔性结构具有刚度较小、基频低、阻尼低等特点,其不良振动问题会影响结构的使用性能甚至可能引起结构破坏,有必要采取减振措施降低结构不良振动带来的负面影响。
2、主动控制是一种有源的结构振动控制方法,可通过致动器对结构施加主动控制力达到结构减振的目的。主动控制方法中,致动器的作用位置直接影响结构振动控制系统的可控制性和振动控制效果。
3、在目前常规的结构主动控制方法中,一般事先根据目标振动模态确定致动器和传感器的布置位置,一旦安装完成后则无法再改变致动器的作用位置。当不同的荷载作用导致结构的主振动模态发生变化时,固定位置的致动器会因无法做出位置调整导致结构振动控制效果降低;特殊情况下,当致动器作用于结构振动模态的节点位置时,甚至导致振动控制失效。
4、针对以上问题,有必要研究一种可行的结构振动控制方法,克服以往主动控制方法中致动器位置固定、灵活性差的缺点,通过致动器的灵活移动和位置调整,实现对不同结构模态的振动控制。
技术实现思路
1、针对现有技术中存在的技术问题,本发明的目的是:提供一种柔性土木结构振动的可移动主动控制方法,可以根据结构主振动模态的变化移动调整致动器的作用位置,并基于调整后的致动器位置更新计算主动控制力,以达到更好的结构振动控制效果,并且可以避免因致动器作用于结构振型节点位置导致的振动控制失效问题。
2、为了达到上述目的,本发明采用如下技术方案:
3、一种柔性土木结构振动的可移动主动控制方法,包括以下步骤:
4、步骤1:建立结构有限元模型并做模态分析,获取结构的自振频率和振型函数;
5、步骤2:分布式传感器获取结构响应,计算响应的功率谱,并进行主成分分析,确定结构的主振动模态;
6、步骤3:不同外荷载作用下,结构的主振动模态会发生改变,根据结构主振动模态的振型函数,以振型函数峰值所对应的x坐标值作为致动器的作用位置,即;
7、步骤4:直线运动模组与结构连接,位置随动系统控制直线运动模组搭载主动质量阻尼器移动至作用位置处;
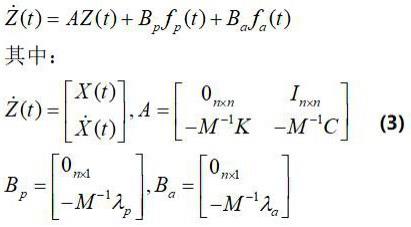
8、步骤5:基于致动器的作用位置建立结构振动控制系统的状态空间方程;
9、步骤6:选取系统状态权矩阵和控制力权参数的取值区间,其中为结构振动控制系统中的模态刚度矩阵,为与维度相同的零矩阵,根据目标性能函数与控制力权参数的关系曲线,选取最优的控制力权参数;
10、步骤7:采用 matlab的 lqr函数计算控制力增益矩阵;
11、步骤8:根据传感器布置位置建立结构振动控制系统的观测方程,并采用 kalman滤波器估计结构的状态向量;
12、步骤9:计算结构的主动控制力;
13、步骤10:主动质量阻尼器根据生成主动控制力并施加于作用位置处。
14、作为一种优选,步骤2中,结构的主振动模态确定方法为:依次提取结构的自振频率及其对应的功率谱幅值,根据功率谱幅值的大小排序确定结构的主振动模态。
15、作为一种优选,步骤3中,致动器的作用位置确定方法为:根据结构主振动模态的振型函数以及结构振动模态与结构振动系统可控制性的关系,致动器的作用位置选择在振型函数绝对值的最大峰值处,即:。
16、作为一种优选,步骤4中,直线运动模组与结构固定连接,直线运动模组具有位置随动功能,通过负反馈控制追踪变化的目标位置。
17、作为一种优选,步骤5中,结构振动控制系统的状态空间方程由公式表示;式中,为系统状态向量,为系统特性矩阵,,分别为荷载位置向量和控制力位置向量。
18、作为一种优选,步骤6中,目标性能函数为结构主振动模态的模态阻尼比,由公式,表示;式中,表示取实部,表示取模,表示取特征值函数,为控制力增益矩阵。
19、作为一种优选,步骤6中,最优的控制力权参数确定方法如下:绘制目标性能函数与控制力权参数的关系曲线,在保证取值较大的情况下,选取最大的作为最优控制力权参数。
20、作为一种优选,步骤8中,结构振动控制系统的观测方程由公式表示;式中,为系统输出矩阵。
21、作为一种优选,步骤8中,为 kalman滤波器根据系统观测结果得到的系统状态向量估计值。
22、作为一种优选,步骤10中,主动质量阻尼器通过质量块的运动产生惯性力。
23、本发明的原理是:可通过识别结构的主振动模态对致动器的作用位置做出移动调整,并根据最佳的致动器作用位置计算结构振动系统所需的主动控制力,致动器的位置优化调整后能够实现以同等的控制力水平达到更好的振动控制效果,也可以避免因致动器作用于振型节点位置导致的振动控制失效。
24、本发明具有如下优点:
25、1.本发明方法中,在位置随动系统的控制下,直线运动模组可搭载主动质量阻尼器将控制力施加至结构的任意位置。
26、2.本发明方法可识别结构的主振动模态,并做出致动器的位置调整,可以实现对不同结构振动模态的控制。
27、3.本发明方法基于结构的主振动模态做出控制力位置优化调整,并以结构受控模态的模态阻尼比最大为目标函数优化 lqr控制力权参数,能够以同等的控制力水平达到更好的结构振动控制效果。
28、4.本发明方法中,致动器的位置优化调整可以避免因致动器作用于结构模态振型节点位置而导致的振动控制失效问题。
技术特征:
1.一种柔性土木结构振动的可移动主动控制方法,其特征在于,包括以下步骤:
2.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤2中,结构的主振动模态确定方法为:依次提取结构的自振频率及其对应的功率谱幅值,根据功率谱幅值的大小排序确定结构的主振动模态。
3.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤3中,致动器的作用位置确定方法为:根据结构主振动模态的振型函数以及结构振动模态与结构振动系统可控制性的关系,致动器的作用位置选择在振型函数绝对值的最大峰值处,即:。
4.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤4中,直线运动模组与结构固定连接,直线运动模组具有位置随动功能,通过负反馈控制追踪变化的目标位置。
5.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤5中,结构振动控制系统的状态空间方程由公式表示;式中,为系统状态向量,为系统特性矩阵,,分别为荷载位置向量和控制力位置向量。
6.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤6中,目标性能函数为结构主振动模态的模态阻尼比,由公式,表示;式中,表示取实部,表示取模,表示取特征值函数,为控制力增益矩阵。
7.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤6中,最优的控制力权参数确定方法如下:绘制目标性能函数与控制力权参数的关系曲线,在保证取值较大的情况下,选取最大的作为最优控制力权参数。
8.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于,步骤8中,结构振动控制系统的观测方程由公式表示;式中,为系统输出矩阵。
9.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于:步骤8中,为kalman滤波器根据系统观测结果得到的系统状态向量估计值。
10.按照权利要求1所述的一种柔性土木结构振动的可移动主动控制方法,其特征在于:步骤10中,主动质量阻尼器通过质量块的运动产生惯性力。
技术总结
本发明涉及一种柔性土木结构振动的可移动主动控制方法,通过模态分析确定结构的频率和模态振型;根据传感器获得的结构响应数据计算结构响应功率谱,进行主成分分析并确定主振动模态;根据主振动模态的振型函数确定致动器作用位置;通过直线运动模组搭载主动质量阻尼器移动至作用位置;建立结构振动控制系统的状态空间方程和观测方程;用主动控制方法计算控制力增益矩阵,用Kalman滤波器估计结构的状态向量;计算结构的主动控制力,由主动质量阻尼器生成目标控制力。本发明以同等的控制力水平达到更好的振动控制效果,避免因致动器作用于振型节点位置导致的振动控制失效,属于土木结构的主动振动控制领域。
技术研发人员:贾布裕,陈扬文,余晓琳,罗宇蕃
受保护的技术使用者:华南理工大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!