AUV轨迹跟踪方法、装置、AUV及存储介质
本发明涉及自治水下航行器,特别是涉及一种auv轨迹跟踪方法、装置、auv及存储介质。
背景技术:
1、自治水下航行器(autonomous underwater vehicles,auv)是探索海洋的重要工具,其在海底沉船救援,水下未知地形资源勘探,海底石油管道检查,水下焊接,等方面都有着广泛用途。auv在完成各种水下作业任务的时候,能对任意设定轨迹进行精确跟踪是auv必不可少的能力之一,尤其是在执行水下区域搜索和海底地形测绘任务的时候,轨迹跟踪的精确性将会影响到搜索覆盖的区域和测绘数据的准确性。但由于auv受洋流的影响,使得auv系统不稳定,无法按照预定轨迹航行,且auv系统是复杂非线性系统,因而增加了auv控制难度。
2、现有设计的控制器结构简单,易于实现,在工程中得到广泛应用,但是现有控制器都是基于线性模型或近似线性模型设计的,不符合auv控制器实际物理状况。auv运动模型参数往往是不精确的,在运行过程中存在参数摄动的情形,线性控制器是不能较好的满足控制任务要求。
技术实现思路
1、本发明实施例旨在提供一种auv轨迹跟踪方法、装置、auv及存储介质,以解决现有技术中设计的auv轨迹跟踪控制器不符合实际物理状况,不能满足控制任务要求的问题。
2、为解决上述技术问题,本发明实施例提供以下技术方案:
3、根据本发明的一方面,提供一种auv轨迹跟踪方法,所述方法包括:
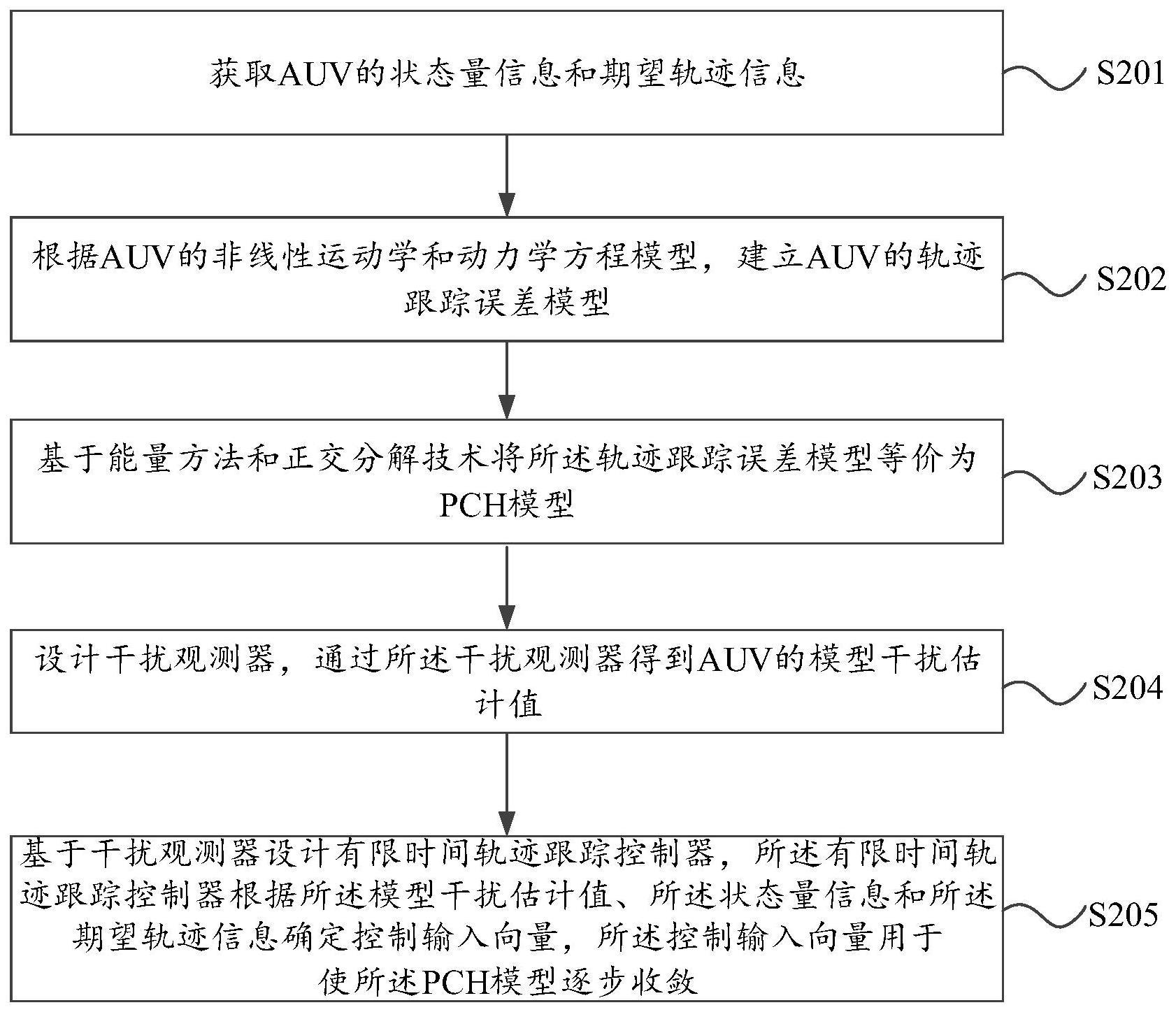
4、获取auv的状态量信息和期望轨迹信息;
5、根据auv的非线性运动学和动力学方程模型,建立auv的轨迹跟踪误差模型;
6、基于能量方法和正交分解技术将所述轨迹跟踪误差模型等价为pch模型;
7、设计干扰观测器,通过所述干扰观测器得到auv的模型干扰估计值;
8、基于所述干扰观测器设计有限时间轨迹跟踪控制器,所述有限时间轨迹跟踪控制器根据所述模型干扰估计值、所述状态量信息和所述期望轨迹信息确定控制输入量,所述控制输入量用于使所述pch模型逐步收敛。
9、可选地,所述根据auv的非线性运动学模型和动力学方程模型,建立auv的轨迹跟踪误差模型的步骤包括:
10、建立auv的非线性运动学和动力学方程模型:
11、
12、建立auv路径跟踪状态误差模型:
13、
14、令τd=f(x)+m-1w,将式(2)带入到式(1),得到auv的轨迹跟踪误差模型:
15、
16、式(1)中,r(η)为auv载体坐标系到auv惯性坐标系的旋转变换矩阵,v为auv的运动速度向量,为v的一阶导数,η为auv惯性坐标系下auv的位置和方向向量,为η的一阶导数,矩阵m为auv的质量矩阵,矩阵c(v)为哥氏力矩阵,矩阵d(v)为阻尼矩阵,τ为auv的控制输入向量,g(η)为auv的重力与浮力,w为海洋环境扰动向量;
17、式(2)中,x1为速度误差,x2为轨迹误差,为期望的运动速度,ηd为期望的运动轨迹;
18、式(3)中,τd为auv的模型干扰。
19、可选地,所述基于能量方法和正交分解技术将所述轨迹跟踪误差模型等价为pch模型的步骤包括:
20、引入如下hamilton函数:
21、
22、其中,α为大于1的整数,根据所述hamilton函数,利用正交分解技术将所述轨迹跟踪误差模型等价为:
23、
24、基于auv系统运动模型运行过程中产生的参数摄动影响,对式(5)进行改进,得到所述pch模型:
25、
26、式(5)中,为轨迹跟踪误差模型经过hamilton控制理论等价转换得到的模型参数,
27、式(6)中,t表示时间,θ表示未知的模型变量,θ=p,m=m*+δm,c=c*+δc,d=d*+δd,m*、c*、d*为标称部分,δm、δc、δd为摄动参数,p为auv系统运动模型中未知不确定性的参数向量。
28、可选地,所述干扰观测器为:
29、
30、式(7)中,为中间过渡变量,k1为所述有限时间轨迹跟踪控制器的控制参数,为auv的模型干扰估计值。
31、可选地,所述有限时间轨迹跟踪控制器被设计为:
32、
33、其中,k1、k2、γ为所述有限时间轨迹跟踪控制器的控制参数,τ为auv的控制输入向量,为未知的模型变量θ的估计值,为的一阶导数。
34、可选地,所述方法还包括:将式(8)的有限时间轨迹跟踪控制器带入到式(6)的pch模型,得到auv增广系统:
35、
36、基于式(9)的auv增广系统,利用李雅普诺夫函数验证所述有限时间轨迹跟踪控制器的稳定性。
37、可选地,所述李雅普诺夫函数为:
38、
39、其中,
40、根据本发明的又一方面,提供一种auv轨迹跟踪装置,所述装置包括:
41、信息获取模块,用于获取auv的状态量信息和期望轨迹信息;
42、模型建立模块,用于根据auv的非线性运动学和动力学方程模型,建立auv的轨迹跟踪误差模型;
43、模型等价模块,用于基于能量方法和正交分解技术将所述轨迹跟踪误差模型等价为pch模型;
44、干扰观测模块,用于设计干扰观测器,通过所述干扰观测器得到auv的模型干扰估计值
45、轨迹跟踪模块,用于基于所述干扰观测器设计有限时间轨迹跟踪控制器,所述有限时间轨迹跟踪控制器根据所述模型干扰估计值、所述状态量信息和所述期望轨迹信息确定控制输入向量,所述控制输入向量用于使所述pch模型逐步收敛。
46、根据本发明的另一方面,提供一种auv,所述auv包括存储器、处理器及存储在存储器上运行的计算机程序,所述处理器执行所述程序时实现上述任一项所述的auv轨迹跟踪方法的步骤。
47、可选地,所述auv还包括auv主体、传感器模块、有限时间轨迹跟踪控制器、干扰观测器、预设轨迹输入模块、推力分配模块和推进器,所述传感器模块用于采集auv的状态量信息,并将所述auv的状态量信息分别传输到所述干扰观测器和所述有限时间轨迹跟踪控制器,所述干扰观测器根据所述auv的状态量信息得到auv的模型干扰估计值,所述有限时间轨迹跟踪控制器接收所述预设轨迹输入模块输入的期望轨迹信息、所述auv的状态量信息和所述干扰观测器输出的模型干扰估计值得到控制输入向量,将所述控制输入向量输出至所述推力分配模块,以使得所述推力分配模块根据所述控制输入向量控制所述推进器推动所述auv主体按照期望轨迹运行。
48、根据本发明的再一方面,提供一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,当所述计算机程序被处理器执行时,所述处理器执行上述任一项所述的auv轨迹跟踪方法的步骤。
49、本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例中,提供了一种auv轨迹跟踪方法,从能量角度通过hamilton非线性泛函方法,设计了一种基于干扰观测器的auv有限时间自适应轨迹跟踪控制器,该控制器能应对海洋环境下各种复杂干扰,能准确控制auv轨迹跟踪。本发明不仅提高了auv的控制精度,而且减少了auv控制系统稳定收敛时间。
- 还没有人留言评论。精彩留言会获得点赞!