一种机电联合阵列的多目标测角跟踪系统的制作方法
本发明涉及测控通信,特别涉及一种机电联合阵列的多目标测角跟踪系统。
背景技术:
1、机电联合扫描系统是传统抛物面系统与平面相控阵系统的结合产物,兼具了抛物面系统的指向连续变化,以及相控阵系统的多目标与波束捷变特性,且可实现集群目标在全空域范围内的有效覆盖。面向集群多目标的测控通信场景,利用目标同时分布在有限空域范围内的特点,较多套抛物面系统和全空域阵列系统而言,机电联合扫描系统具备天然的成本优势。
2、机电联合扫描系统除了同时覆盖空域有限以外,角度测量与跟踪受系统特性约束,无法直接继承抛物面或平面相控阵系统的角度测量与跟踪方法。机电联合扫描系统角度测量与跟踪的主要问题体现在:基于阵列接收数据的角度测量与电波束指向和阵面法向同时关联,电波束和伺服之间必须建立时间同步机制,并解决阵面法向读取时刻较目标估计角度滞后的问题;伺服控制的阵面机械运动角动态受限,角度控制与实际响应的不匹配程度直接影响着测角精度。如何实现上述条件下的高精度目标角度测量与跟踪,是将机电联合扫描系统应用在测控通信领域必须解决的问题。
技术实现思路
1、本发明的目的在于:提供一种机电联合阵列的多目标测角跟踪系统,旨在解决机电联合扫描阵列在高精度角度测量与跟踪应用中遇到的,系统机械与电波束的同步控制问题、阵面法向读取时刻较目标估计角度滞后的问题、以及伺服角度控制与实际响应不匹配带来的测角精度恶化等技术问题。
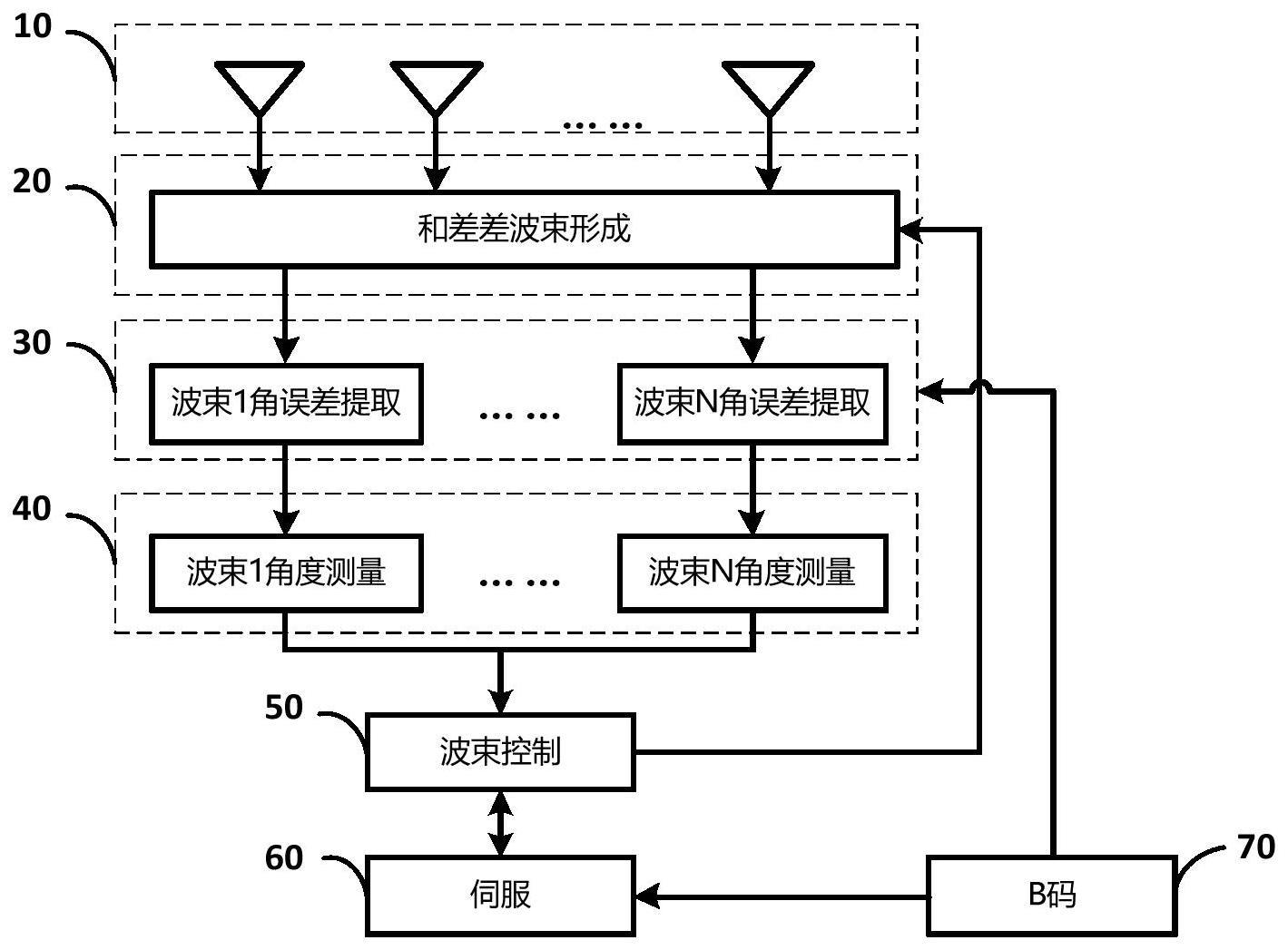
2、为实现上述目的,本发明提供一种机电联合阵列的多目标测角跟踪系统,包括射频处理单元、和差差波束形成单元、角误差提取单元、角度测量单元、波束控制单元、伺服单元以及b码单元,其中:
3、所述射频处理单元利用天线对空间中的信号进行接收,并依次经过低噪放大、滤波处理、混频以及ad变换,得到数字采样信号;
4、所述和差差波束形成单元依据存储的阵元坐标、通道幅相位标定值,以及波束控制模块发送的阵面波束指向,计算阵列合成权值,并对射频处理单元输出的数字采样信号进行加权合成,形成和信号、横向差信号以及纵向差信号,即和差差信号,再对和差差信号分别进行下变频、低通滤波以及数据抽取,得到和差差输出信号;
5、所述角误差提取单元利用和差差波束形成单元下发的和差差输出信号进行误差电压提取、积分和修正,计算得到横向角误差与纵向角误差,并送至角度测量单元;
6、所述角度测量单元对角误差提取单元下发的横向角误差与纵向角误差进行直角坐标系角误差向量计算、滤波与角度更新处理,计算得到下一权值更新时刻的目标方向;
7、所述波束控制单元将伺服采样的阵面法向进行外推处理,得到下一权值更新时刻的阵面法向估计,随后对目标载体系角度进行坐标变换,计算得到各目标的阵面系角度,并将其发送至和差差波束形成单元,用以电波束指向控制;同时,波束控制单元将各目标的载体系角度进行中位数计算,得到阵面法向的控制角度;
8、所述伺服单元在完成阵面姿态控制以及阵面法线的采样;
9、所述b码单元为系统的角误差提取单元和伺服单元提供时间基准。
10、进一步的,所述角误差提取单元进行误差电压提取的开始时刻由积分周期tjf与阵面法向读取时刻综合决定,采用如下计算公式:
11、
12、其中,下标k表示系统第k个权值更新周期。
13、进一步的,所述积分周期tjf由系统特定的应用场景决定,积分时间越长,信噪比提升越明显,但对大动态目标的积分效果越差,同时积分周期tjf应不大于权值更新周期tgx。
14、进一步的,所述角误差提取单元的误差电压修正过程具体为:
15、各波束的误差电压分别独立进行修正,修正过程是指将积分后的横向误差电压和纵向误差电压分别乘以由信号波长λ、相控阵横向孔径da、相控阵纵向物理孔径de决定的修正系数,得到横向角误差和纵向角误差,其中,上标k表示权值更新周期序号,误差电压的修正过程可用公式表示为:
16、
17、
18、式中,π表示圆周率。
19、进一步的,所述角度测量单元对横向角误差与纵向角误差进行直角坐标系角误差向量计算,具体包括:
20、利用第k个权值更新周期的横向角误差和纵向角误差,对直角坐标系下的角误差向量进行估计,计算公式如下:
21、
22、式中,误差坐标转换矩阵直角坐标系下波束指向向量是第k个权值更新周期波束指向方位角和波束指向俯仰角的函数,是中间变量,由横向角误差和纵向角误差决定,函数p(θ,)的表达式为:
23、
24、其中,上标t表示转置运算符,(θ,)表示或
25、误差坐标转换矩阵的公式为:
26、
27、进一步的,所述角度测量单元对横向角误差与纵向角误差进行滤波与角度更新处理,具体包括:
28、将单位方向向量误差的各元素分别进行环路滤波,并将直角坐标系下波束指向向量进行更新,得到下一个权值更新周期内波束指向向量
29、进一步的,所述波束控制单元包括阵面法向外推模块、阵面系角度计算模块和阵面法向控制角度计算模块,其中:
30、阵面法向外推模块将伺服采样的阵面法向进行外推处理,得到下一权值更新时刻的阵面法向估计;
31、阵面系角度计算模块对目标载体系角度进行坐标变换,计算得到各目标的阵面系角度,并将其发送至和差差波束形成单元;
32、阵面法向控制角度计算模块将各目标的载体系角度进行中位数计算,得到阵面法向的控制角度。
33、进一步的,所述阵面法向外推模块采用环路滤波的方式,将第k个权值周期内的阵面法向方位角和俯仰角分别进行环路滤波,得到第k+1个权值周期内的阵面法向方位角和俯仰角的估计值和,计算公式如下:
34、
35、
36、其中,b0和b1表示滤波常数,yk-1和yk分别表示第k-1和k个权值周期内对方位角误差的滤波结果,zk-1和zk分别表示第k-1和k个权值周期内对俯仰角误差的滤波结果,和分别表示第k-1和k个权值周期内的阵面法向方位角外推误差,和分别表示第k-1和k个权值周期内的阵面法向俯仰角外推误差。
37、进一步的,所述阵面系角度计算模块实现将载体系下的目标方位角和俯仰角转换到阵面系,转换矩阵由载体系和阵面系的具体定义,以及阵面法向的方位角和阵面法向的俯仰角决定。
38、进一步的,所述伺服单元在完成阵面姿态控制以及阵面法线的采样,具体的:
39、伺服单元周期性对阵面法向进行采样,采样周期与权值更新周期tgx一致,阵面法向采样的开始时刻任意可选,决定了角误差提取单元的误差电压提取的开始时刻
40、本发明提供一种机电联合阵列的多目标测角跟踪系统,该系统利用b码对角误差提取单元和伺服阵面法向提取时刻进行精确控制,在此基础之上,系统利用单脉冲和差比相方法和三轴环路滤波实现对目标的载体系角度估计,解决目标角度测量与角跟踪的过顶问题,系统将各目标的中位数角度作为阵面法线的控制角度,在保证目标的最大增益的同时,降低了阵面法向控制角度的稳定性,系统将伺服上报的阵面法向进行实时外推处理,解决了阵面法向读取的滞后问题。各单元的协同工作,实现了机电联合扫描系统数据信息流的闭环,提升了系统的角度测量与跟踪性能。
41、本发明的有益效果如下:
42、1、本发明是一种机电联合阵列的多目标测角跟踪系统,系统利用b码对角误差提取单元的积分时刻和伺服阵面法向提取时刻进行精确控制,实现了角误差提取时刻与阵面法向时刻的对齐。
43、2、本发明是一种机电联合阵列的多目标测角跟踪系统,利用单脉冲和差比相方法和三轴环路滤波实现对目标的载体系角度估计,解决目标角度测量与角跟踪的过顶问题。
44、3、本发明是一种机电联合阵列的多目标测角跟踪系统,系统将各目标的中位数角度作为阵面法线的控制角度,在保证目标的最大增益的同时,降低了阵面法向控制角度的稳定性。
45、4、本发明是一种机电联合阵列的多目标测角跟踪系统,系统将伺服上报的阵面法向进行实时外推处理,解决了阵面法向读取的滞后问题。
- 还没有人留言评论。精彩留言会获得点赞!